


Dobré odpoledne, dnes chci sdílet pokyny k výrobě nádrže. Interní ovladač bude mít dvě možnosti: ESP-8266 a Arduino Pro Mini. V první verzi se ovládání provádí prostřednictvím Wi-Fi komunikace. Ve druhém - IR dálkové ovládání. Je vyroben na základě TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), je poháněn soupravou Tamiya 70097 Twin-Motor Gearbox Kit a motory, které byly dodány s převodovkou.
Budeme potřebovat:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- lepidlo modelu (například TAMIYA Cement)
- Tamiya 70097 Twin-Motor Gearbox Kit
- ESP 8266 -12E nebo Arduino Pro Mini 8MHz 3,3 V
- stabilizátor napětí AMS 1117 3,3 V 8 000 mA (pokud je k dispozici u ESP 8266-12E)
- Řidič motoru Qifei L9110
- kondenzátor 10v 1000uF
- dvoubarevná (červená, zelená) LED
- modrá LED
- 2 červené LED
- IR přijímač
- fotorezistor
- 2 přihrádky pro 2 AAA baterie nebo 4 AAA 1,2 V 1000 mA NI-MN baterie
- 2 rezistory 2ohm
- 4 odpory 75 ohmů
- 6 rezistorů 10 kOhm (pokud je k dispozici u ESP 8266-12E)
- tlačítko
- fotorezistor
- USB - TTL
- páječka
- vícebarevné dráty
Krok 1 Pouzdro a mechanika.
Nejprve musíte sbírat model TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Spodní část lepíme podle pokynů, s výjimkou částí zakrývajících výstupní otvory pro hřídele převodovky. Přední hvězdy se také nelepí. Horní část nalepte podle pokynů beze změn. Po nalepení všeho nechte zaschnout a přejděte ke sběru převodovky. Jak je vidět z pokynů, Tamiya 70097 může být sestavena ve dvou různých verzích.
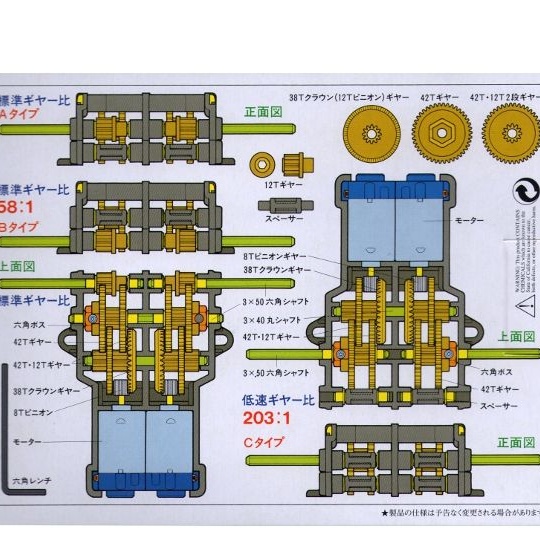
První varianta s převodovým poměrem 58: 1, druhá - 203: 1. Potřebujeme první možnost. A také zde není tak jednoduché. V tomto případě může být výstup osy blíže ke spodní části převodovky nebo uprostřed. Výdech os musí být proveden ve střední díře! Po smontování převodovky pokračujeme v instalaci na model. Teoreticky by všechno mělo být jednoduché, protože model i převodovka jedné firmy. V praxi se tam musela zatlačit převodovka. V horizontální poloze převodovky se hřídele hnacích kol vydaly nahoru, takže jsme museli řezat kovovou desku, která umožňovala upevnit převodovku v požadované poloze.

Nápravy převodovky budou muset být sníženy o 3 mm. Potom na ně přilepte hnací kola.

V horní části blíže k zadní části vytváříme otvory pro dvoubarevnou LED a IR přijímač.

Blíže k přední straně je otvor pro modrou LED, který bude sloužit jako baterka.

A uvnitř poklopu - pro fotorezistor.

Na zadní stranu nalepte červené LED diody pro osvětlení.

K výše uvedenému je potřeba pájet dráty. Je výhodnější to provést před instalací.
Krok 2 Elektrikář
Zde uvedu výběr možností pro další montáž.
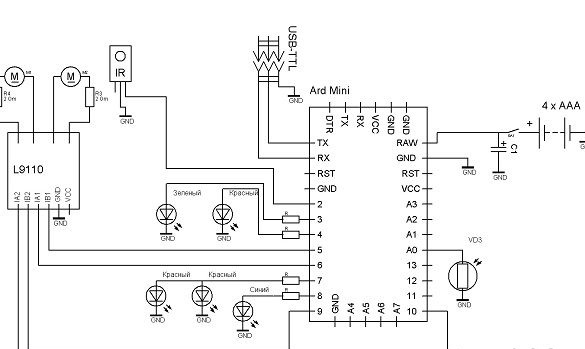
Pokud jste zvolili ESP 8266. Vestavěný modul Wi-Fi značně usnadňuje proces řízení a připojení.Lze jej snadno naprogramovat v Arduino IDE. Nejlepší je vybrat modul se 4 MB paměti. V tomto případě je nutné shromáždit minimální postroj pro spuštění a blikání ESP-8266. Pouze napájecí kolík VCC je připojen přímo k napájecímu zdroji, zbývající piny: CH_PD, RESET, GPIO0, GPIO2, musí být přivedeny k napájecímu zdroji (VCC) přes odpor. Odpory 10 kOm lze nahradit jinými, od 4,7 kOm do 50 kOm, s výjimkou GPIO15 - jeho hodnota musí být až 10 k. Přímo k mínus (GND) zdroje napájení připojujeme pouze GND a také přetáhneme GPIOO přes rezistor na 10 kOm, čímž uvedeme modul do režimu stahování firmwaru, do GND. Tlačítko je nutné pro restartování a blikání modulu. Konektor USB-TTL - pro firmware.
Zde je schéma
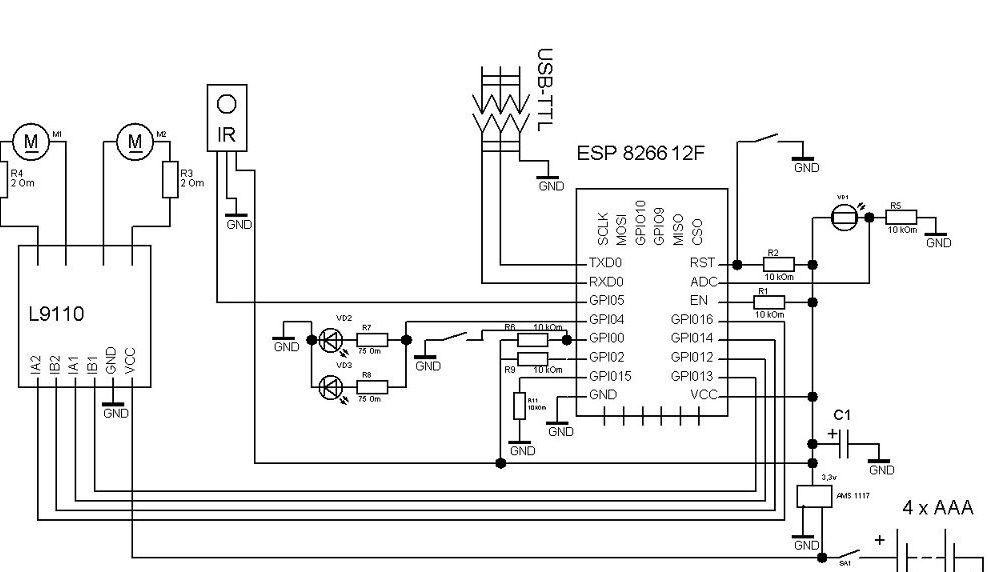
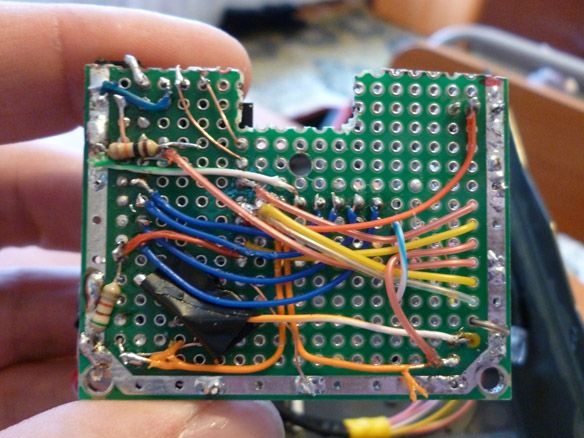
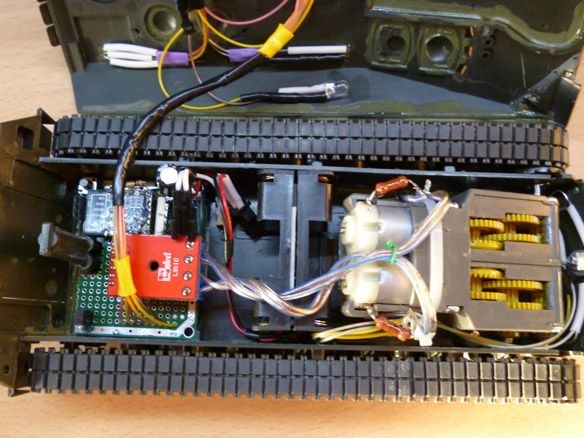
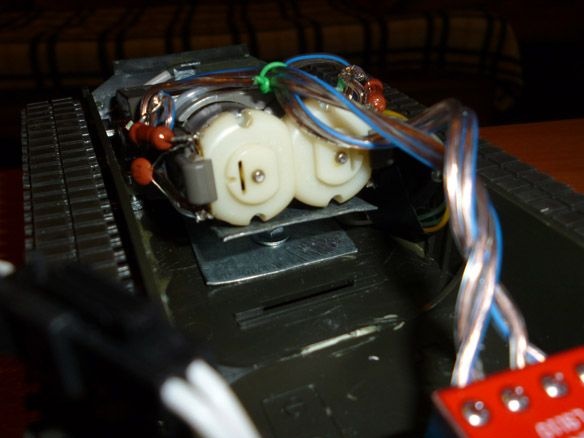
Trochu vysvětlím, že modré a dvě červené LED diody jsou potřeba pro podsvícení (je viditelné a krásné ve tmě), fotorezistor je připojen k ADC kontroléru a je potřebný k určení osvětlení (když je podsvícení tmavé). 10 kOhm pull-up rezistory, 75 Ohm pro LED, 2 Ohm omezovač proudu pro motory (bez nich, při pokusu o pohyb, regulátor přetížen). Pájíme vše podle obvodu na desce plošných spojů. Pro napájení můžete použít 4 "malé" baterie nebo čtyři baterie velikosti AAA, pájené v sérii. Lepíme dva oddíly dvou baterií oboustrannou páskou a zapojujeme do série. Mezi převodovku a desku plošných spojů jsou umístěny jak bateriové prostory, tak akumulátory.

Pokud vaše volba padla na Arduino. Uvnitř se vejde pouze Arduino Pro MINI. Vyplatí se vybírat 3,3 V desku, protože motory jsou navrženy pro 3 V a nechcete samostatně napájet motory a Arduino. Arduino je snazší. Celý kabelový svazek řídicí jednotky a regulátor napětí jsou již na samotné desce. Zbývá rozvinout zásuvku Arduino a ovladač motoru na desce plošných spojů.

Krok 3 Příprava programovacího prostředí.
Chcete-li upravit firmware a vyplnit náčrt v ESP, musíte nainstalovat Arduino IDE z oficiálního webu Arduino.cc a také nainstalovat doplněk pro ESP prostřednictvím Správce nástěn. Chcete-li to provést, spusťte Arduino IDE a poté do pole URL - Nastavení - do pole URL dalších Správců desek vložte odkaz
http://arduino.esp8266.com/package_esp8266com_index.jsonklikněte na OK (do tohoto pole můžete zadat několik odkazů oddělených čárkou). Další nástroje - Board - Boards Manager, do pole filtru zadejte esp8266 a klikněte na ESP8266 od ESP8266 Community Forum. Klikněte na Instalovat a počkejte na dokončení stahování. Nyní zbývá vybrat nabídku Board - Generic ESP8266 v nabídce Nástroje a nastavit frekvenci vašeho modulu na 80 nebo 160 MHz, velikost paměti flash a vybrat sériový port, ke kterému je připojen adaptér USB-TTL.
Pro Arduino stačí nainstalovat Arduino IDE z oficiálního webu Arduino.cc.
Krok 4 Firmware
Zbývá upravit skicu a vyplnit ji ESP.
V poli „String _ssid =" ";" mezi uvozovkami označují, ke kterému přístupovému bodu se chcete připojit.
"String _password =" ";" je heslo pro tuto síť.
"String _ssidAP =" Mardella ";" název sítě, kterou ESP zvýší, pokud se nepřipojí k existující síti.
"String _passwordAP =" 12345678 ";" - heslo sítě, které ESP zvýší, pokud se nepřipojí k existujícímu.
"String SSDP_Name =" Mardella ";" Název SSDP
Po spuštění se ESP pokusí připojit k přístupovému bodu uvedenému v náčrtu, pokud bude úspěšný, musíte určit IP adresu našeho robota a připojit se k této adrese pomocí prohlížeče. Můžete také projít počítačem k síťové infrastruktuře, najít tam náš tank a dvojitým kliknutím se k němu připojit. Pokud se připojení nezdaří, ESP se stane přístupovým bodem. Poté lze získat přístup připojením k novému přístupovému bodu a zadáním 192.168.1.1 do prohlížeče.
Webové rozhraní se skládá ze dvou stránek. První k ovládání. Druhý je pro přizpůsobení. Na druhé stránce můžete určit přístupový bod, ke kterému se chcete připojit, stejně jako název nádrže a název a heslo přístupového bodu, který ESP vyvolá. Všechny změny se projeví po restartu. Modul můžete také restartovat prostřednictvím webového rozhraní.
Pro Arduino musíte upravit všechna pole „results.value“. Po zapsání IR kódů konzoly, kterou tam budete používat.

Video tanchika: