


Část mého návrhu jsem převzal z montážních pokynů Lego Technic 42049. Ostatní je moje improvizace. Pro správu budu používat modul Bluetooth připojený k zařízení Android nebo počítači.
Potřebujeme tedy:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 ovladače motoru L9110S
- 1 servopohon SG-90
- Bluetooth modul HC-05 nebo jeho ekvivalent
- USB-UART pro firmware arduino
- Mini převodový motor 50 ot / min
- Mini motorová převodovka 100 ot / min
- Motorová převodovka 6v 150 ot / min
- 2 LED diody
- 2 odpory 150 ohmů
- Kondenzátor 10v 1000uF
- 2 jednoradové hřebeny PLS-40
- Induktor 68mkGn
- 6 baterií NI-Mn 1,2 V 1000 mA
- Konektor táta-máma dva kolíky na drát
- Homutiku
- dráty různých barev
- pájka
- Rosin
- páječka
- Šrouby 3x20, matice a podložky pro ně
- Šrouby 3x40
- Šrouby 3x60
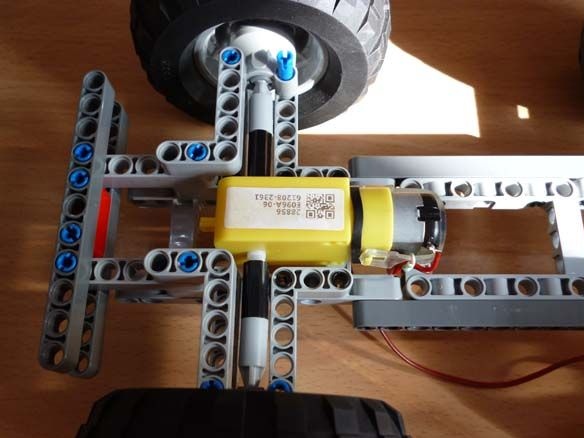
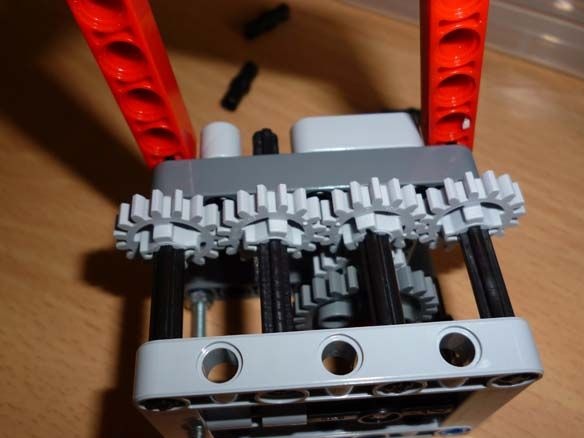
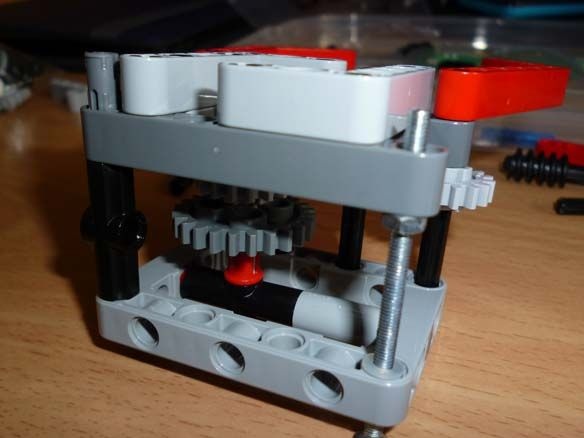
Krok 1 Sestava zadní nápravy
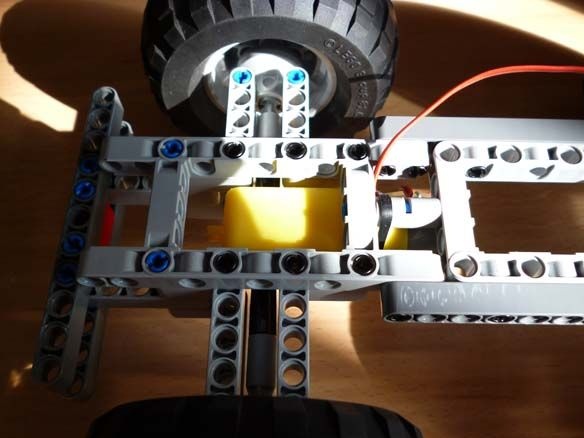
Pro pohyb použijeme převodový motor s 6 V motorem při rychlosti 150 ot / min. Osa převodovky musí být odříznuta z obou stran a položena na díly lego. Zadní náprava je sestavena takto:
A na druhou stranu:
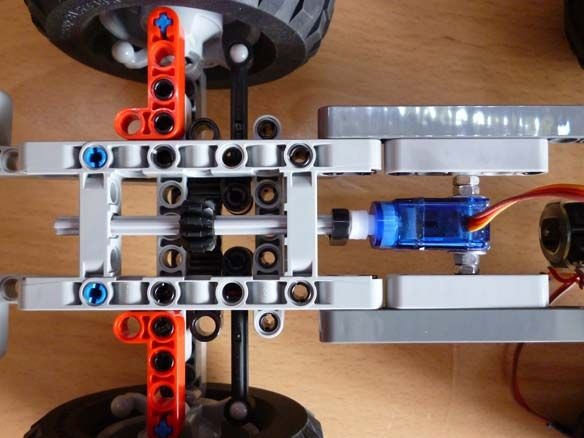
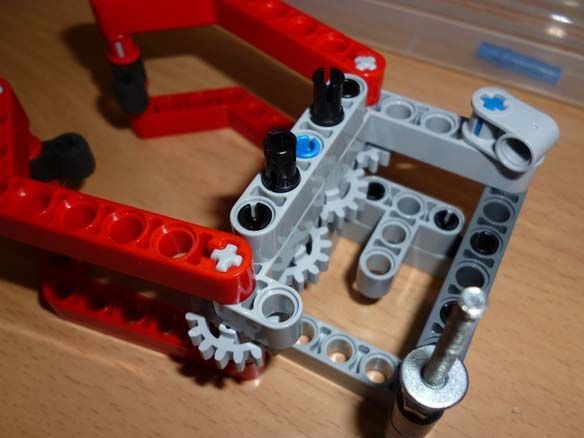
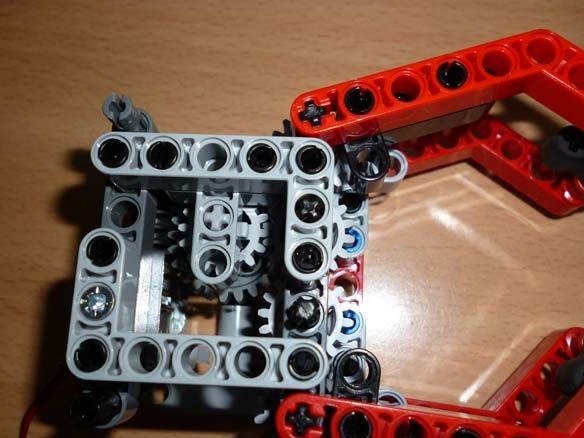
Krok 2 Sestavení přední nápravy
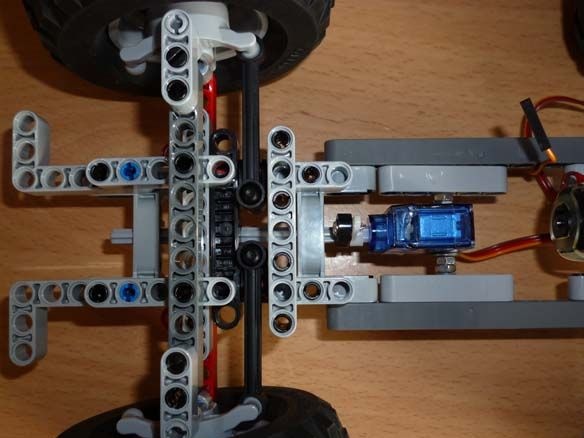
Pro otáčení kol je servo SG-90 velmi vhodné. Chcete-li jej upevnit na náš model, je třeba pečlivě vyvrtat, aby nedošlo k dotyku s vnitřními částmi serva, průchozím otvorem o průměru 3,2 mm nebo jeho prostým střihem nožem na papír. A také odstřihněte vyčnívající části („křídla“ pro upevnění). Do vytvořeného otvoru vložíme šroub a upevníme jej maticemi. Na servo hřídeli jsme nasadili páku se šroubovanou částí z lega:

A na druhou stranu:
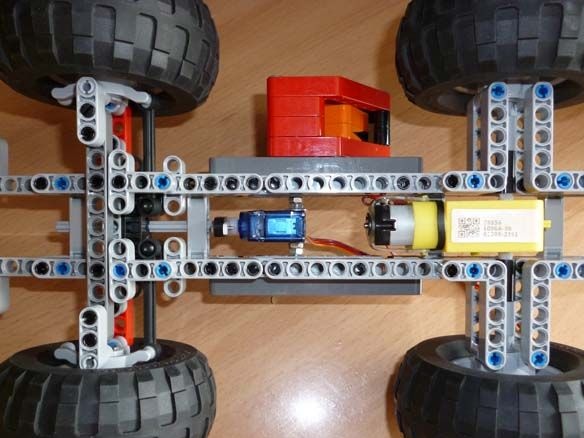
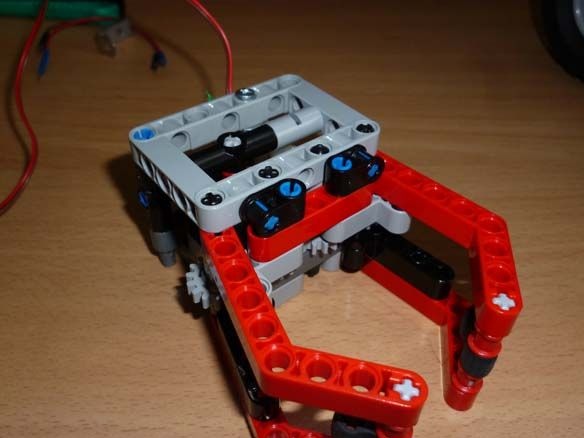
Krok 3 Sestavení základny a kabiny
Spojujeme oba mosty, jak je vidět na fotografii:

Montujeme kabinu (potřebnou pro krásu):
Kabinu jsme postavili na základě:

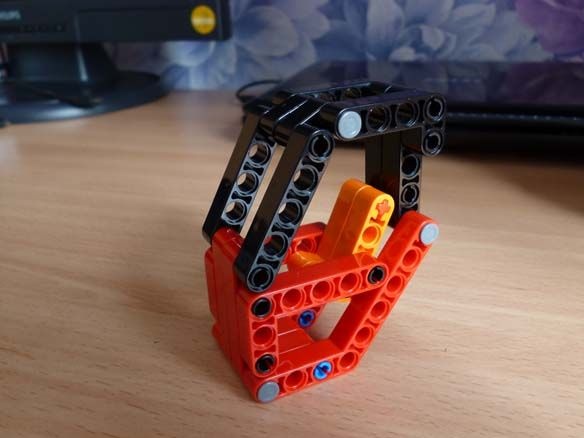
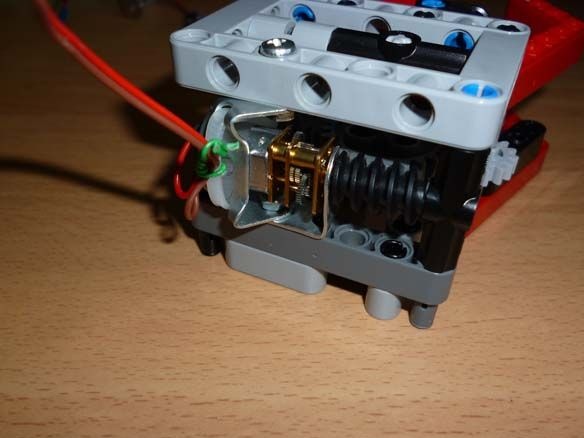
Krok 4 Nasazení čepice nebo drápu
Dráp je poháněn mini motorovou převodovkou při rychlosti 50 ot / min. Problém propojení převodového motoru s částmi konstruktéra jsem vyřešil následujícím způsobem: Na osu motoru převodovky jsem nasadil spojovací pouzdro a vložil šrot zápalky pro upevnění. Při montáži používal převodový motor kovový plast od návrháře železa a svorku. Ukázalo se následující:

Dále sbíráme dráp sám z fotografie:

Připevníme jej k základně:

Pro zvedání drápu je vhodná mini motorová převodovka s rychlostí 100 ot / min:


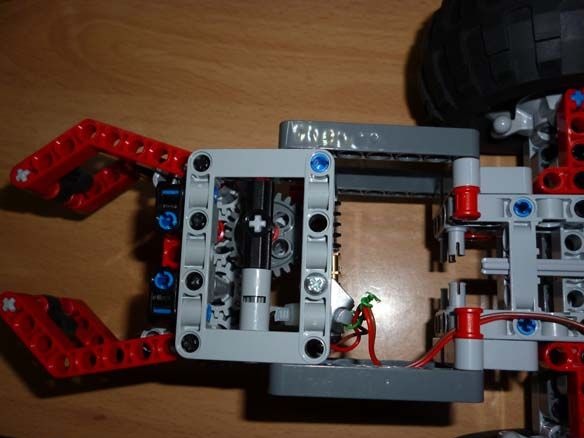
Krok 5 Elektrikář
Pro ovládání použijeme Arduino Pro Mini a Bluetooth modul. Pro připojení motorů jsou zapotřebí motorové ovladače.
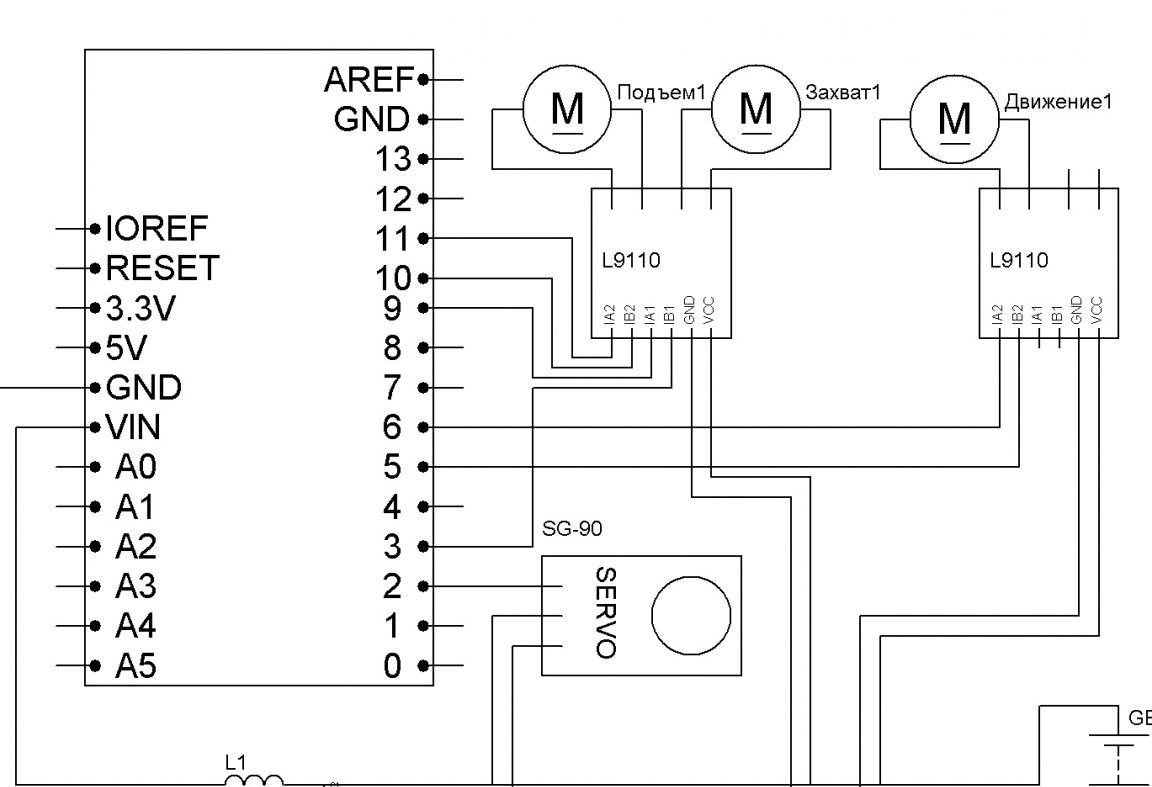
Propojení všech komponent s dupontními vodiči Dupont.Napájení - 6 NI-Mn 1,2 V 1000 mA baterie připojené v sérii. Kondenzátor s nízkým výkonem, induktor také najdete, musíte stabilizovat výkon mikrokontroléru. Anody obou LED jsou připojeny k 4 pinovému arduino, katody k GND. Pro použité LED diody jsou vybrány rezistory. Pro větší pohodlí vložte baterie pomocí pásky.

Vše lepíme na oboustrannou pásku na základě:

Krok 6 Nastavení Bluetooth
Nejlevnější moduly Bluetooth dnes jsou HC-05 a HC-06. V čínských internetových obchodech jsou hojné. Rozdíly mezi nimi spočívají v tom, že první mohou pracovat v režimu master (slave) i v režimu slave (master). Druhým je ryze otrokářské zařízení. Jinými slovy, HC-06 nemůže detekovat spárované zařízení a navázat s ním spojení, může pouze poslouchat master.
Stručná charakteristika modulů:
- Bluetooth čip - BC417143 výrobce
- komunikační protokol - Bluetooth Specification v2.0 + EDR;
- akční rádius - až 10 metrů (výkonová úroveň 2);
- Kompatibilní se všemi adaptéry Bluetooth, které podporují SPP;
- Velikost paměti flash (pro uložení firmwaru a nastavení) - 8 Mbit;
- frekvence rádiového signálu - 2,40 .. 2,48 GHz;
- rozhraní hostitele - USB 1.1 / 2.0 nebo UART;
- spotřeba energie - proud během komunikace je 30-40 mA. Průměrná hodnota proudu je asi 25 mA. Po navázání spojení je aktuální spotřeba 8 mA.
Obvykle se moduly prodávají jako dvě desky pájené dohromady. Menší z nich je tovární modul, široce používaný v různých elektronický zařízení. Velké - speciální prkénko pro kutily. Vypadá to jako menší deska s čipem BC417:

A tak samotné DIY moduly HC-05 a HC-06:
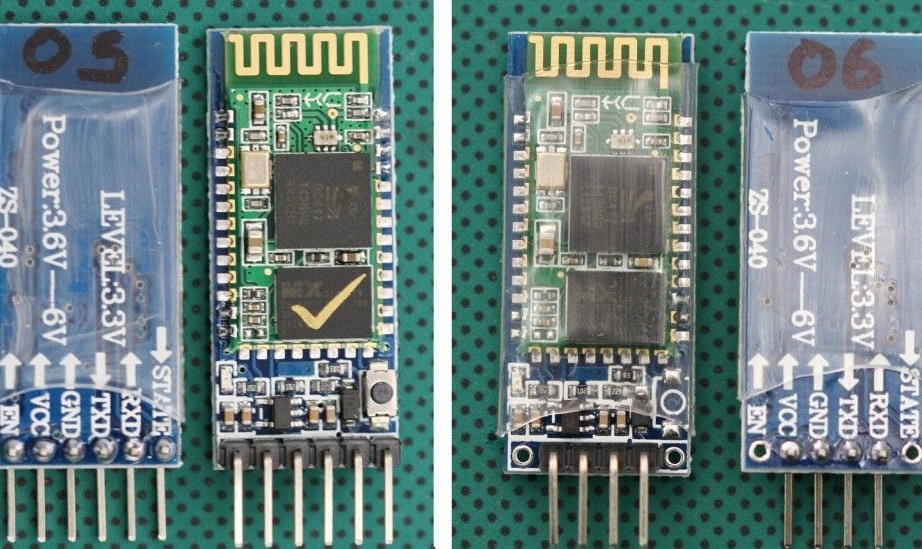
V zásadě můžete použít jakýkoli modul, který se vám líbí. Modul bez prkénku je levnější, ale pak se budete muset starat o 3,3 V napájecí zdroj pro modul a mučit se pájením vodičů k modulu. Zvolil jsem optimální, podle mého názoru, poměr cena / funkční HC-06.
Připojujeme se takto:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Pro správnou funkci musí být modul nakonfigurován. Nakonfigurujeme AT příkazy zadané do okna terminálu. Uvedu příklad nastavení modulu HC-05. Pokud máte jiné nastavení, může se lišit. Aby mohl náš modul přijímat příkazy, nejprve vypálíme Arduino následujícím firmwarem:
V tomto případě Arduino funguje jako most mezi počítači a modulem. Ve firmwaru používám knihovnu SoftwareSerial. Při vysokých rychlostech to funguje nestabilně. Pokud chcete vysokou rychlost, můžete modul připojit přímo ke kontaktům Arduino RX a TX a přepsat firmware. Ale v mém případě budeme pracovat s modulem rychlostí 9600. Takže po firmwaru otevřete terminál a zadejte:
„AT“ (bez uvozovek) by měla přijít odpověď „OK“ (to znamená, že je vše správně připojeno a modul funguje)
„AT + BAUD96000“ (bez uvozovek) by měla přijít odpověď „OK9600“.
Pokud máte správnou odpověď, přejděte k dalšímu kroku.
Krok 7 Firmware
Pro zápis firmwaru a samotného firmwaru používám Arduino IDE. Aktuální verze pro dnešek je 1,8. Aktuálně firmware:
Krok 8 Nastavte telefon.
Na telefonu se systémem Android je třeba nainstalovat program pro ovládání robota pomocí Bluetooth. Je jich mnoho. Do Google Play můžete zadat „Bluetooth Arduino“ a vybrat si podle svého vkusu. Měl jsem rád BT Controller. Stáhněte si a nainstalujte do telefonu nebo tabletu Android. Dále je třeba prostřednictvím nastavení systému Android navázat spojení s naším modulem. Heslo pro připojení je „1234“ nebo „0000“. Dále nakonfigurujte program pro příslušné příkazy. Seznam je uveden níže.
Krok 9 Nastavení počítače (je-li to nutné)
V případě potřeby, nebo jen pohodlí pro ovládání, můžete použít počítač nebo notebook. Počítač musí mít Bluetooth. Komunikujeme s naším modulem pomocí ovládacích prvků na počítači. Dále potřebujeme terminál pro odesílání příkazů. Jakékoli vhodné pro vás. Po nahrání firmwaru se ovládání provádí pomocí následujících tlačítek (příkazů):
W - vpřed
S - zpět
A - vlevo
D - správně
F - stop
G - volant
K - světlomety
L - světlomet vypnutý
R - zvedněte
E - sjezd
Q - zastavení výtahu
T - zachycení
Y - uvolnění
H - Zastavte dráp
Neustálé zadávání příkazů je nepohodlné, proto k odesílání příkazů doporučujeme použít program. Používám Z-Controller.V programu vyberte port (com port, přes který je navázáno připojení) a nakonfigurujte klíče pro příkazy. Nastavit nečinný a intuitivní.
