
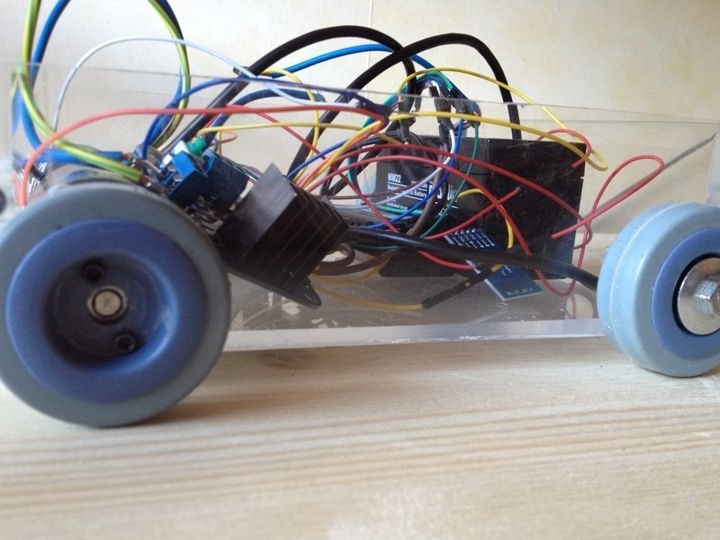
Tenhle robot ovládán pomocí bluetooth smartphonu. Akcelerometr smartphonu měří úhel telefonu doleva / doprava, nahoru / dolů, používá tato data pro výpočet rychlosti směrových motorů, data jsou přenášena přes Bluetooth do Arduino
Co musíte postavit robota.
Arduino uno, HC-06 Bluetooth modul, dva 300 RPM 12v převodové motory, H-most L298N Dual H Bridge Motor Controller
Olověná baterie 12 až 1,3 A. Každý motor spotřebuje 0,4 A plus spotřebu logiky řidiče. Vodiče Arduino, běžné 9V baterie a konektor pro připojení baterie k Arduino. Elektrické dráty pro připojení ovladačů elektrických motorů. USB kabel. Telefon s Androidem verze 4 a vyšší. 4 otočná 50mm gumová kola od Screwfix nebo Toolstation, dva univerzální náboje Lynxmotion HUB-02.










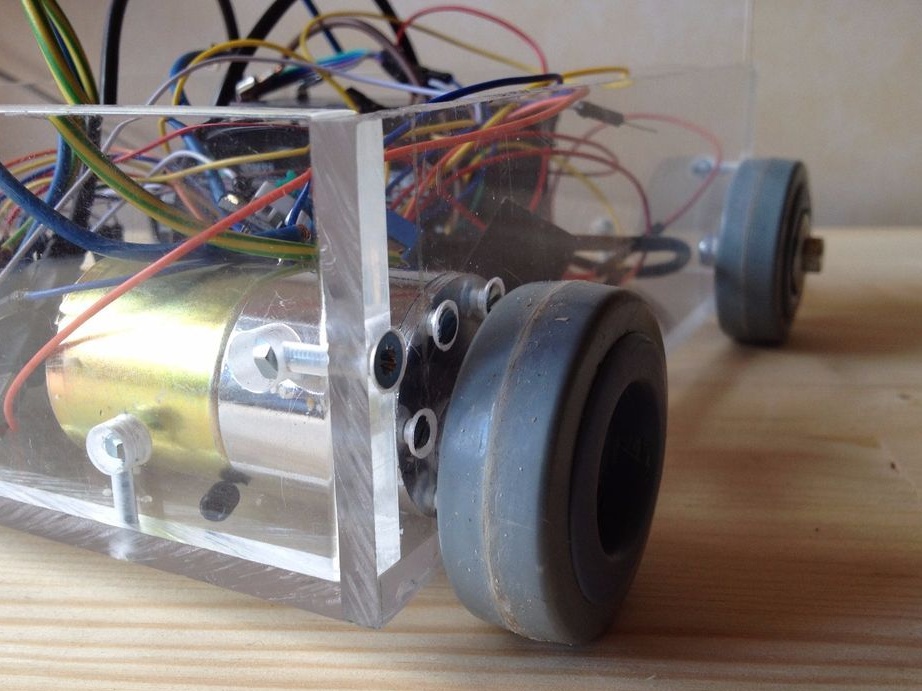
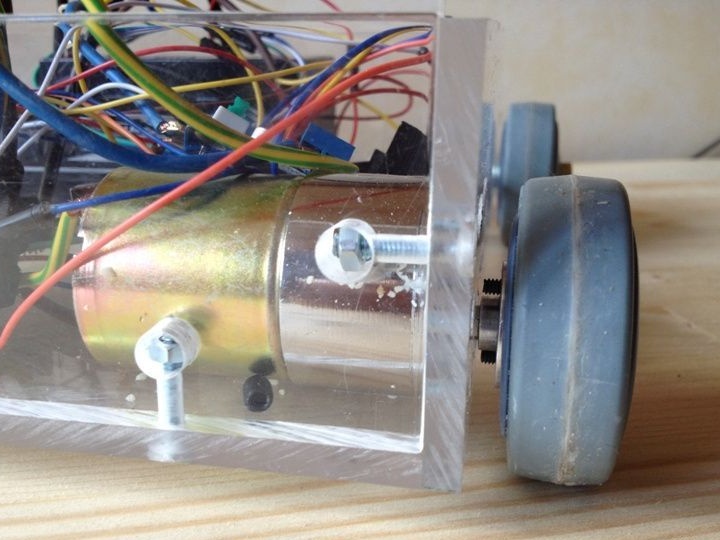
Pouzdro je sestaveno z plastu o délce 22 cm a šířce 17 cm. K hřídeli musí být připojeny dva motory a zajištěny závitovým čepem.
Přední kola
Kaučuk je odstraněn z válečků a do nich jsou vyvrtány dva otvory v souladu s otvory na náboji. Náboje jsou upevněny na osách procházejících skrz pouzdro se závitovými čepy. Poté jsou válečky připevněny k nábojům a na ně je nasazena pryž.
Zadní kola
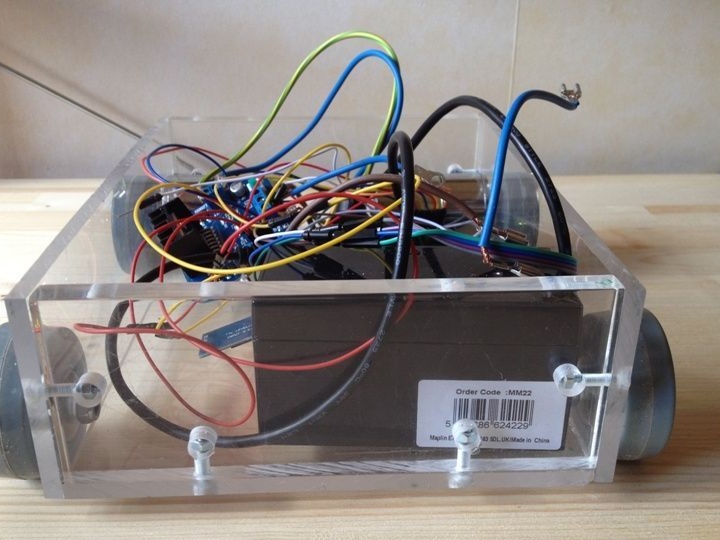
Zadní kola jsou jednoduše odšroubována ze závěsu a zajištěna otvory vyvrtanými v krytu.
Elektrické připojení.
Při načítání programového kódu v Arduinu se vyskytnou problémy. To je způsobeno tím, že Bluetooth modul, jeho RX \ TX kontakty, jsou připojeny k Arduino pinům 1 a 2, které se také používají pro přenos dat přes USB. Je nutné změnit kontakty 1 a 2 na 11 a 12 v připojené knihovně, která bude použita pro přenos dat.
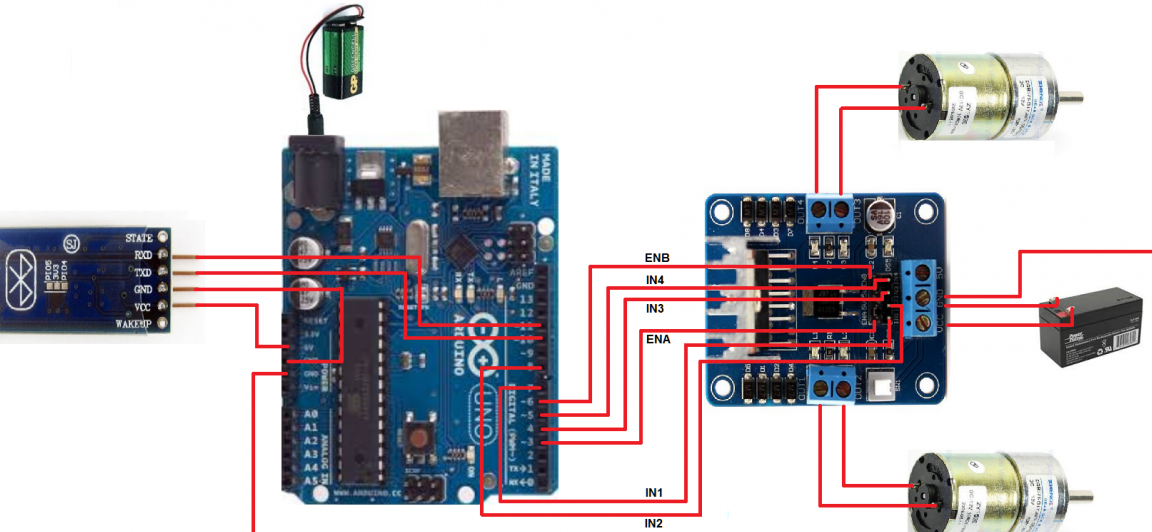
Řidič motoru pro logiku nepotřebuje samostatné napájení. 12 V stačí k napájení logiky řidiče a samotného motoru. Mínus baterie by měl být spojen jak s Arduino, tak s ovladačem motoru. Kontakty vodičů motoru ECA / 5V a ENB / 5V lze propojit. Před připojením k Arduino musí být odstraněn. Na tyto dva 5V piny by nemělo být připojeno nic.
Android kód.
Připojený soubor musí být rozbalen a importován do Android Studio, zabalen do apk a nainstalován do telefonu.
Klíčové soubory:
Aktivita spárovaných zařízení:
deviceList.java
activity_device_list.xml
Činnost LED a řízení pohybu:
ledControl.java
activity_led_control.xml
Manifest:
AndroidManifest.xml
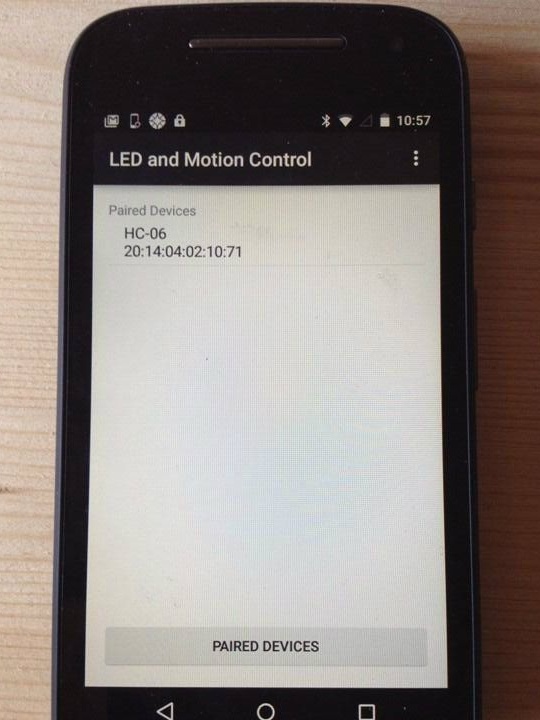
Aktivita spárovaných zařízení zobrazuje dostupná zařízení Bluetooth. Jakmile jsou zařízení připojena, ovládání se přenese na LED a Motion Control Activity.
Tlačítka zapnutí / vypnutí odesílají Arduinu zprávu „zapnuto“ nebo „vypnuto“ a zapnou nebo vypnou vestavěnou LED. Akcelerometr telefonu řídí pohyb, který přenáší hodnoty x / y ze senzoru pokaždé, když se tyto hodnoty změní. Na základě toho vypočítá Arduino rychlost a směr otáčení motorů v rozsahu od 0 do 255. Přenáší tyto hodnoty Arduino ve formě „L-255:“ nebo „R100“ atd. Na základě toho Arduino pošle povely rychlosti otáčení levého motoru do ENA, pravého do ENB a změní směr otáčení změnou polarity na IN1, IN2 vlevo, N3 a N4 pro pravý motor.