
Zvláštností robota BIBOT-1 je, že dokáže plnit dva úkoly. Může se pohybovat za zdrojem světla nebo po černé čáře, kterou lze nakreslit na papír. Robot velmi flexibilní v nastavení, to znamená, že později bude možné jej přizpůsobit jakýmkoli požadovaným podmínkám, tj. učinit jej citlivějším na světlo nebo méně. Je také možné upravit rychlost otáčení motorů, což umožní robotu pracovat lépe, zejména při pohybu podél linie.

Zařízení a princip robota:
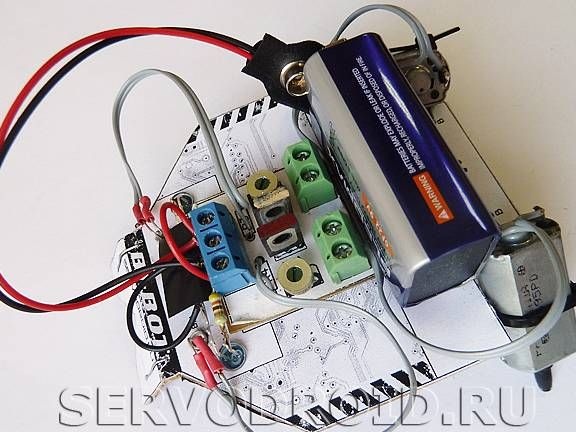
Základna robota je vyrobena z kartonu, zatímco šablona je vytištěna na tiskárně a poté havaruje. Pokud jde o modul radiokomponentů, jako základ byl použit textolit, modul je připevněn k základně robota. Aby bylo tělo tužší, používají se v designu speciální žebra.
Motory jsou nainstalovány jako ve většině z nich domácí, to znamená v úhlu. Z tohoto důvodu není nutné vkládat kola a převodovku. Aby se zabránilo sklouznutí hřídelí po povrchu, jsou na ně nasazeny chrániče.
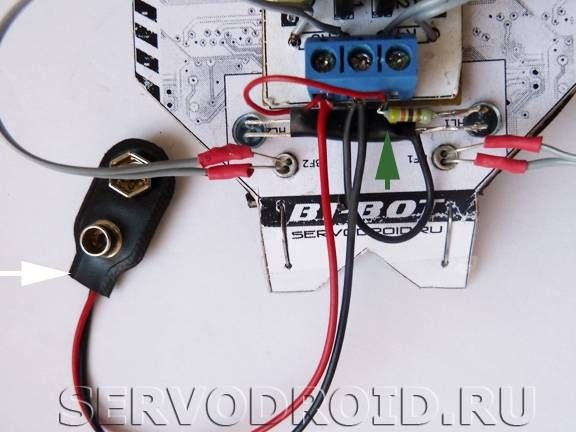
Jako zdroj napájení se používá baterie 9V typu 6F22. Baterie je připevněna páskou a je vždy k dispozici pro snadnou výměnu.
Pokud jde o přepínač, pak auto rozhodl se vyhnout instalaci. Robot se zapíná a vypíná manipulací se sponou připevněnou k baterii.
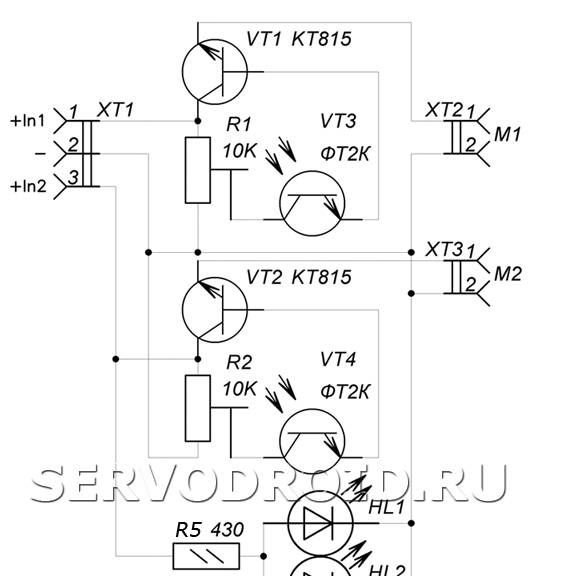
A konečně, nastavení robota. Pro nastavení citlivosti robota má systém dva nastavovací odpory. Když se otáčejí, můžete upravit citlivost robota na světlo a také můžete nastavit rychlost otáčení motorů. Čím citlivější je robot na světlo, tím rychleji se bude pohybovat a naopak.
Pokud jde o princip fungování, vše je uvedeno v diagramu.
Materiály a nářadí:
- 9V baterie a svorka pro připojení;
- dva konektory pro připojení motorů (dvoudílné svorkovnice);
- motory;
- nylonový potěr;
- chránič (gumový váleček);
- dva fototranzistory;
- dvě infračervené LED diody;
- držák ze sešívačky;
- třídílná svorkovnice pro připojení napájení;
- ladící rezistor.

Výrobní proces:
První krok. Návrh DPS
Poplatek se vytváří metodou LUT. Před prací musí být povrch skleněného vlákna důkladně očištěn a poté omyt a důkladně vysušen. Po výrobě musí být vodivé dráhy zkontrolovány pomocí multimetru na zkrat.
Krok dva Instalace elektronický prvky
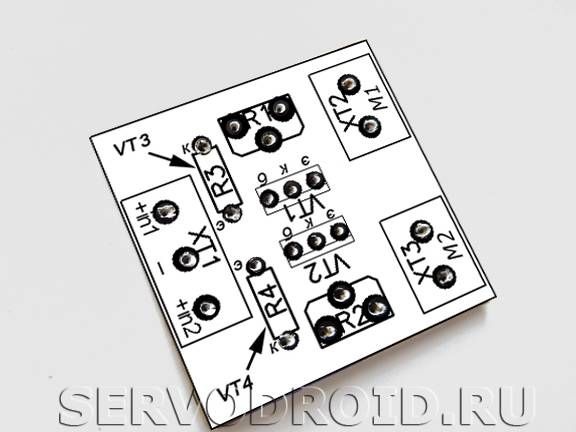
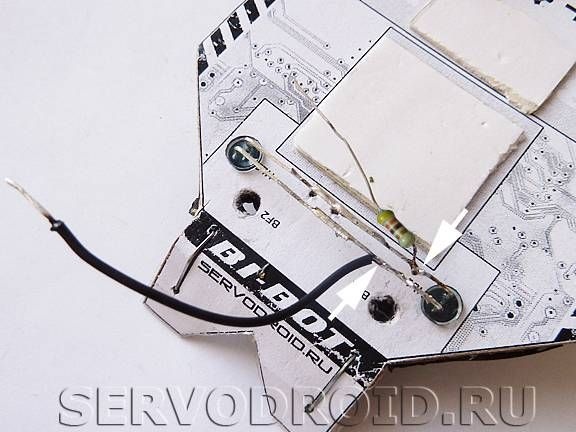
Dále musíte vzít kresbu vytištěnou na papíře a přilepit ji k vytvořené desce. V tomto případě se otvory na papíře a na desce plošných spojů musí přesně shodovat. Dále jsou rádiové komponenty nainstalovány, jak je znázorněno na obrázku. V průběhu práce musí instalace rezistorů R3, R4 nainstalovat fototranzistory VT3, VT4.
Extrémní části třídílné svorkovnice XT1 musí být spojeny montážním drátem. Spojovací body kontaktů musí být dobře izolovány, pro tyto účely je nejlepší použít smršťovací trubku.
Krok tři Jak vytvořit případ
Výkres těla musí být vytištěn na běžném listu papíru A4. Dále musíte vzít kus vlnité lepenky a nalepit na něj kresbu, následně musí být pouzdro oříznuto po obvodu.
Pokud je piktogram „nůžky“ umístěn podél tučných čar, měly by být provedeny řezy. Následně, podél černých tečkovaných linií, musíte ohýbat karton jako na fotografii a dát černé šipky.



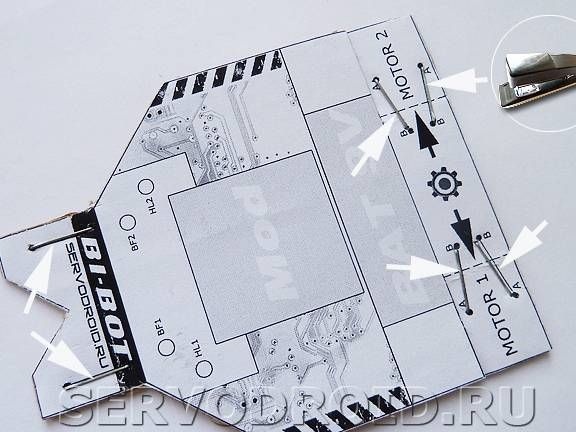


Přední a zadní část pouzdra do zadané polohy pomocí sešívačky, musíte nainstalovat držáky. Místa jejich instalace jsou označena černými čarami s kruhy. K zajištění tužšího rámu jsou nutné svorky. Po instalaci držáků jsou únavné, že se ohýbají podél linií ohybu.
V místech označených BF1, BF2 je třeba vytvořit otvory pro instalaci fototranzistorů. V místech HL1, HL2 musíte vytvořit otvory takové velikosti, aby odpovídaly průměru pouzdra infračervených LED.
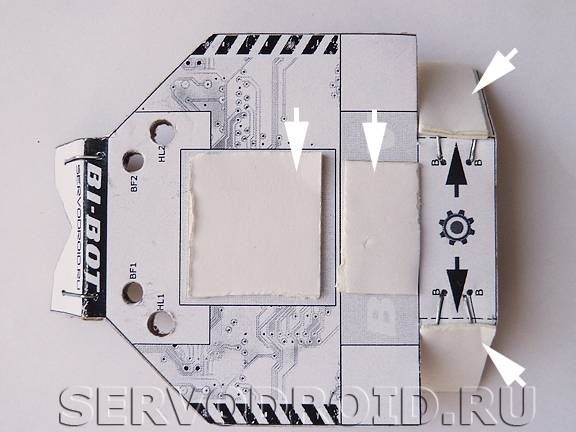
Na místech označených jako „Mod“, „BAT 9V“ a „MOTOR 1“ „MOTOR 2“ nalepte proužky oboustranné pásky.
Krok čtyři Instalace motorů
Motory jsou namontovány v poloze pomocí nylonových spon. Aby se zabránilo sklouznutí hřídelí, musí být nošeny ochrannými kryty. Jsou vyrobeny z gumových pásků, které jsou v heliových tyčích kotců. Ve stejné fázi pájejte vodiče k motorům.


Krok pět Instalace infračervených LED
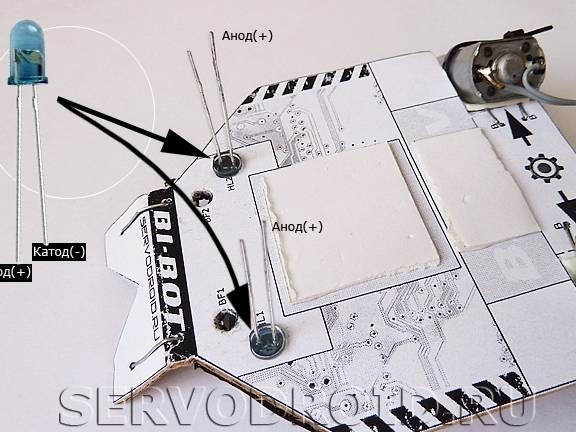
Při instalaci infračervených LED je důležité nezaměňovat jejich závěry, u importovaných prvků je dlouhým kontaktem anoda, to znamená plus. LED diody jsou instalovány v pozicích HL1, HL2, jak je znázorněno na fotografii. Nálezy jsou ohnuty tak, že diody mohou být zapojeny paralelně.
K kladnému kontaktu LED musí být připájen odpor 430 ohmů a černý vodič k zápornému kontaktu.
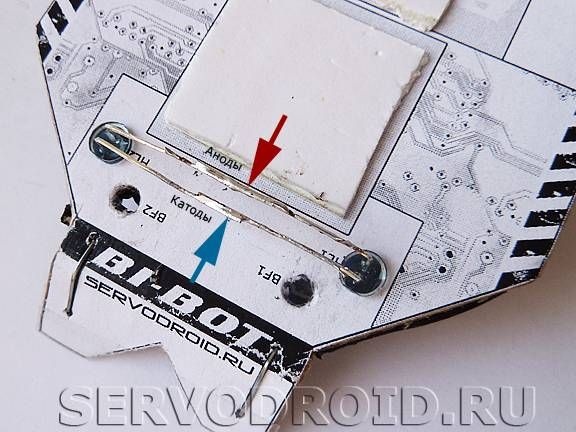
Druhý konec černého drátu musí být připojen ke středovému kolíku třídílné svorkovnice. Pokud jde o výstup rezistoru, je připojen ke svorce svorkovnice.
Krok šestý Konečná fáze sestavení
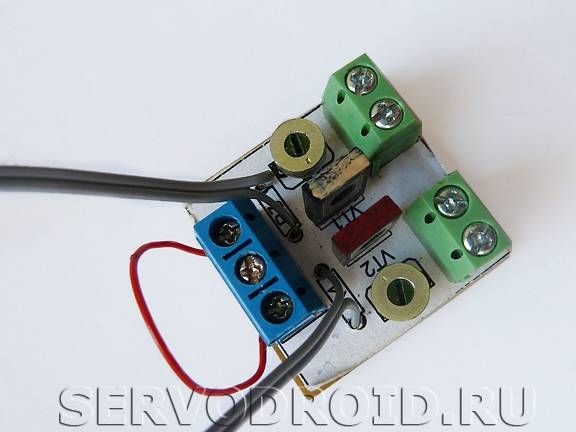
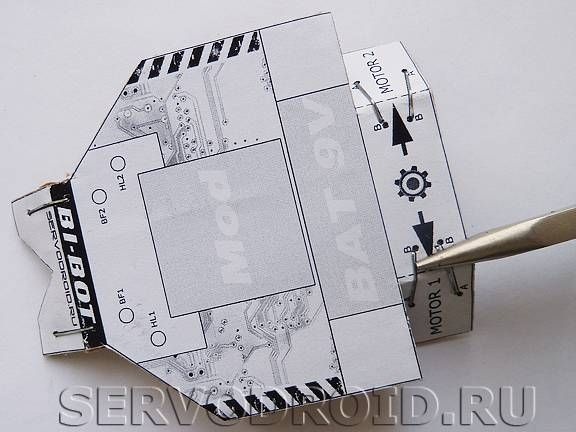
Aby se robot pohyboval podél čáry, jsou fototranzistory umístěny na místo BF1, BF2 jako na fotografii.
Tranzistory pro pohyb za zdrojem světla jsou umístěny na zadní straně.
Na závěr jsou připojeny motory a je vložena baterie.


To je vše, robot je připraven. Nyní to můžete zkusit povolit a nakonfigurovat za nezbytných podmínek.