

Pultoidy se nazývají takové roboty, které lze dálkově ovládat pomocí dálkového ovládání. Pro tyto účely lze například použít dálkové ovládání televizoru. Hlavním úkolem, který se autor při výrobě takového robota postavil, je jednoduchost jeho montáže. Zvažováno robot nevyžaduje výrobu desky s plošnými spoji, instalace je velmi jednoduchá a právě se děje na kartonu.

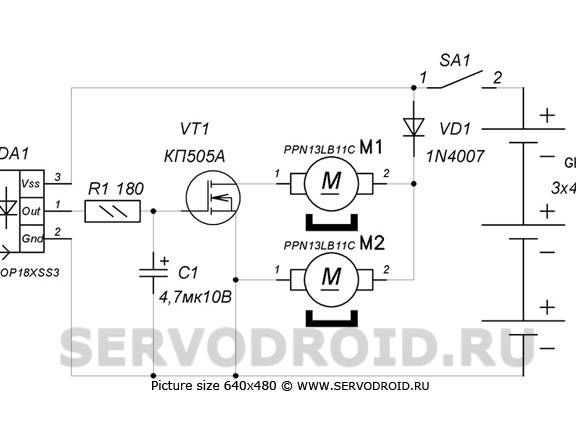
Elektronický Obvod robota se skládá pouze ze čtyř komponent: diody, tranzistoru, fotodetektoru a kondenzátoru. Pro výrobu mechanické části bude zapotřebí také minimum materiálů, například pro výrobu pouzdra se použije CD-ROM.
Takto vyrobený robot bude rozumět pouze jednomu týmu. Vyplatí se stisknout jakékoli tlačítko na ovládacím panelu a robot se začne otáčet. Pokud podržíte tlačítko stisknuté, úhel rotace se zvětšuje, takže se robot může otočit o 360 stupňů.
Robot zařízení
Jako základ pro výrobu robota se používá kompaktní disk. Pokud jde o výkonové prvky, jsou připevněny pomocí šroubů M2. Elektronická deska, také přihrádka na baterie, je připevněna pomocí pásky.
Nyní o motorech jsou umístěny pod úhlem a jejich hřídele spočívají na silnici. Není tedy třeba samostatně vyrábět kola. Šrouby se připevňují pomocí rámů vyrobených ze školní řady.
Robota napájí tři baterie „malého prstu“, jsou instalovány ve zvláštním případě. Napájení produkuje celkem 4,5 V.
A konečně, fotodetektor, je zde pouze jeden, je to typ TSOP. Přijímá modulované signály z jakéhokoli dálkového ovládání, díky čemuž lze robota ovládat.
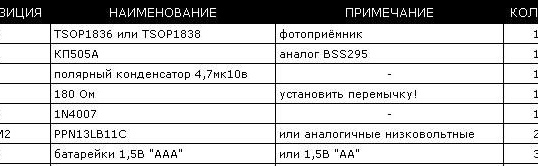
Materiály a nástroje pro výrobu:
- nylonové kravaty;
- fotodetektor typu TSOP1836;
- jeden tranzistor s efektem pole (KP505A);
- kompaktní disk;
- kruhový pro baterie ve třech sekcích;
- tři „malé“ baterie;
- plastové pravítko;
- šrouby pro připevnění rámu;
- dráty a spínače (křížení přes typ).
Výrobní proces:
První krok. Návrh DPS
Chcete-li vyrobit desku s plošnými spoji, musíte nejprve vytisknout výkres na papír. Měli byste získat dva obrázky, na jednom instalačním výkresu a na druhé straně desky. Celkově bude deska sestávat ze tří prvků, uprostřed bude vlnitá lepenka lepená kancelářským papírem na obou stranách. K lepení desky se doporučuje použít suchou lepicí tyčinku.
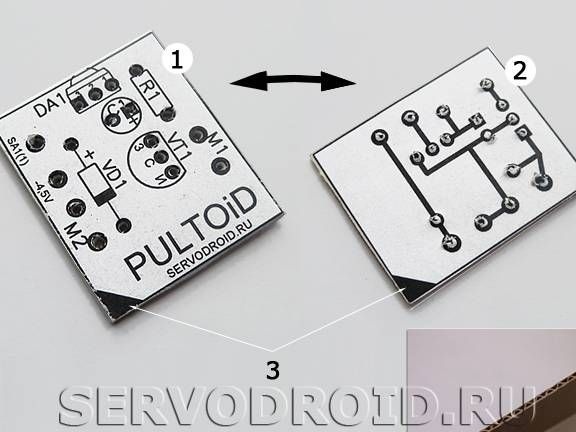
Krok dva Instalace rádiových komponent
Při instalaci elektronických součástí je důležité nezapomenout nebo odříznout vyčnívající okraje kontaktů. Následně budou ohnuty a tak bude vytvořen elektrický obvod. Všechny prvky jsou spojeny pájením podle zadaného schématu.
Rezistor R1 v obvodu musí být nahrazen jakýmkoli jumperem. Pokud jde o fotodetektor, na fotografii je také uvedeno správné pořadí jeho připojení.

Krok tři Instalace silového rámu
Chcete-li nainstalovat motory, budete muset vytvořit výkonový rámec. Jako materiál se zde použije plastové školní pravítko. Musí být nařezána na dvě části a ohnuta podle obrázku. Aby se pravítko začalo ohýbat, musíte přivést špičku horké páječky na místo odklonění ve vzdálenosti asi 2 mm. Také pro tyto účely můžete použít konstrukční fén. Pravítko je třeba plynule ohnout do úhlu asi 30 stupňů.
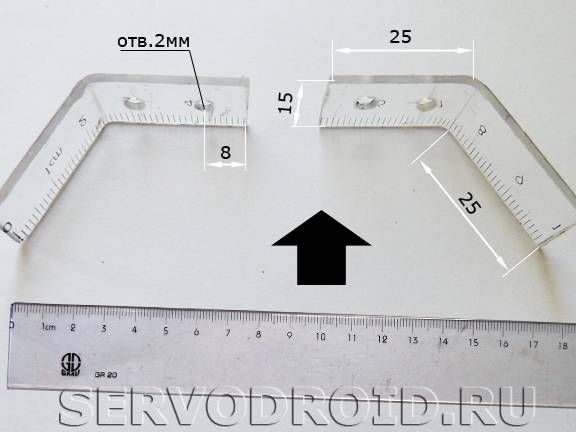

Po vytvoření rámečku můžete pokračovat v jeho instalaci. K tomu použijte šrouby CD a 2 mm s maticemi. Dále jsou na správných místech vyvrtány otvory o průměru nejméně dva milimetry a rám je upevněn šrouby. Aby rám neklouzl, musíte před instalací přilepit oboustrannou pásku na disk.
Krok čtyři Instalace přední podpory
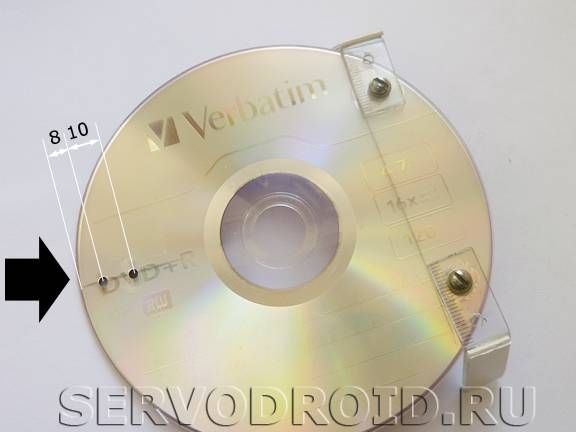
V přední části disku musíte vyvrtat dva otvory a připravit si nylonový potěr. Velikost potěru by měla být 3x150 mm. Musí být vložen tak, jak je uvedeno na fotografii. Výsledkem je, že výsledná podpora se dokonale znehodnocuje, když robot pracuje a klouže po silnici.


Krok pět Instalace motoru
Aby se zabránilo klouzání motorových hřídelí po silnici, musí být na ně nasazeny chrániče. Jsou vyrobeny z gumy, která se nachází na pastách heliových per. Chcete-li nainstalovat motory, musíte nejprve přilepit kus oboustranné pásky k podpěře, zabrání sklouznutí. No, pak jsou motory konečně fixovány nylonovými vazbami.

Krok šestý Připojení spínače a napájení
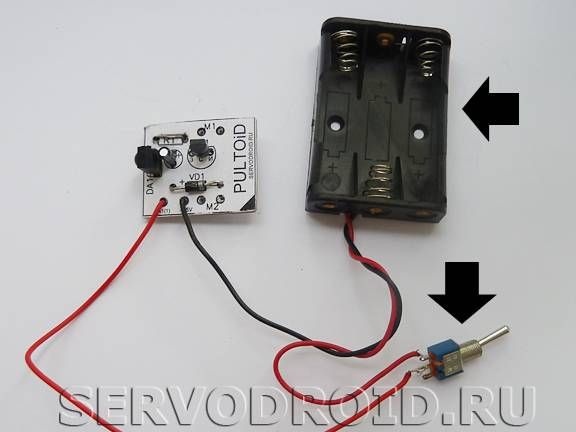
Jako zdroj energie můžete použít jakoukoli baterii, jejíž proud nepřesahuje 5 voltů. V tomto případě se pouzdro používá pro tři prstové baterie, které celkem 4,5 V.
Pokud jde o spínač, je namontován na mezeru kladného kontaktu přicházejícího ze zdroje energie. Červený vodič je připojen k desce ke kolíku SA1 (1) a černý vodič k kolíku -4,5V.


Také v této fázi můžete připojit motory, jejich vodiče jsou připojeny ke kontaktům M1 a M2.
Sedmý krok. Závěrečná fáze
V konečné fázi je třeba všechny elektronické prvky opravit. Jsou připojeny k disku pomocí oboustranné pásky. Pokud jde o spínač, musí být také opraven, k tomu můžete použít horké lepidlo.

To je vše, nyní je robot připraven. Můžete to zkusit zapnout a dát příkaz k zapnutí pomocí libovolného dálkového ovladače.