
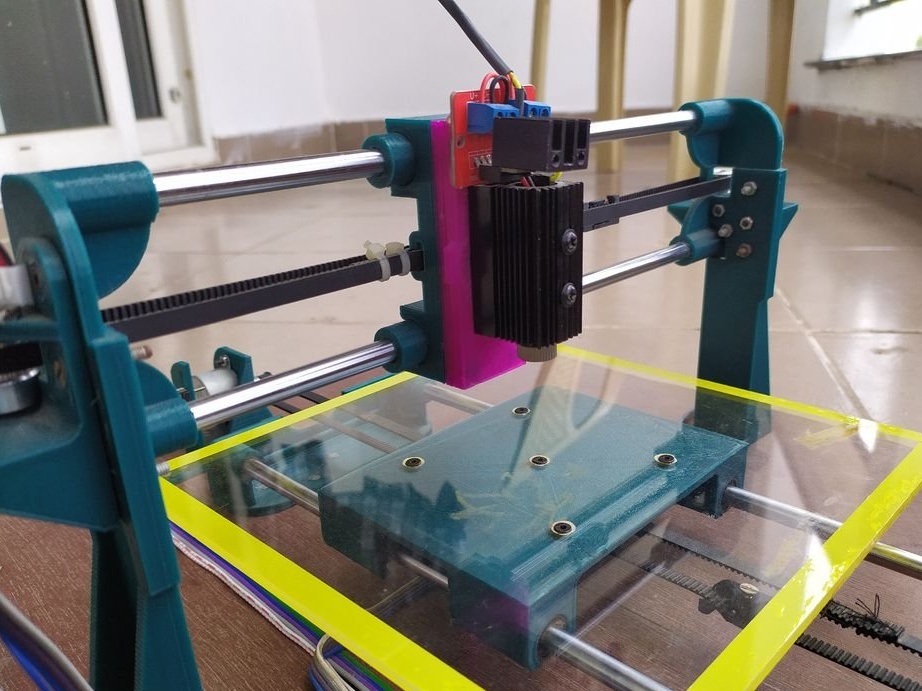
Při pohledu na laserové rytce na aliexpressu narazil mistr na několik modelů napájených USB. Bylo úžasné, že mohli gravitovat na různých materiálech, stejně jako nařezat tvary a vzory z nálepek a papíru, a dělat takovou sílu z 5V USB. Nevýhodou těchto rytců však bylo, že měli malou pracovní plochu, ve většině případů pouze 40 mm x 40 mm.
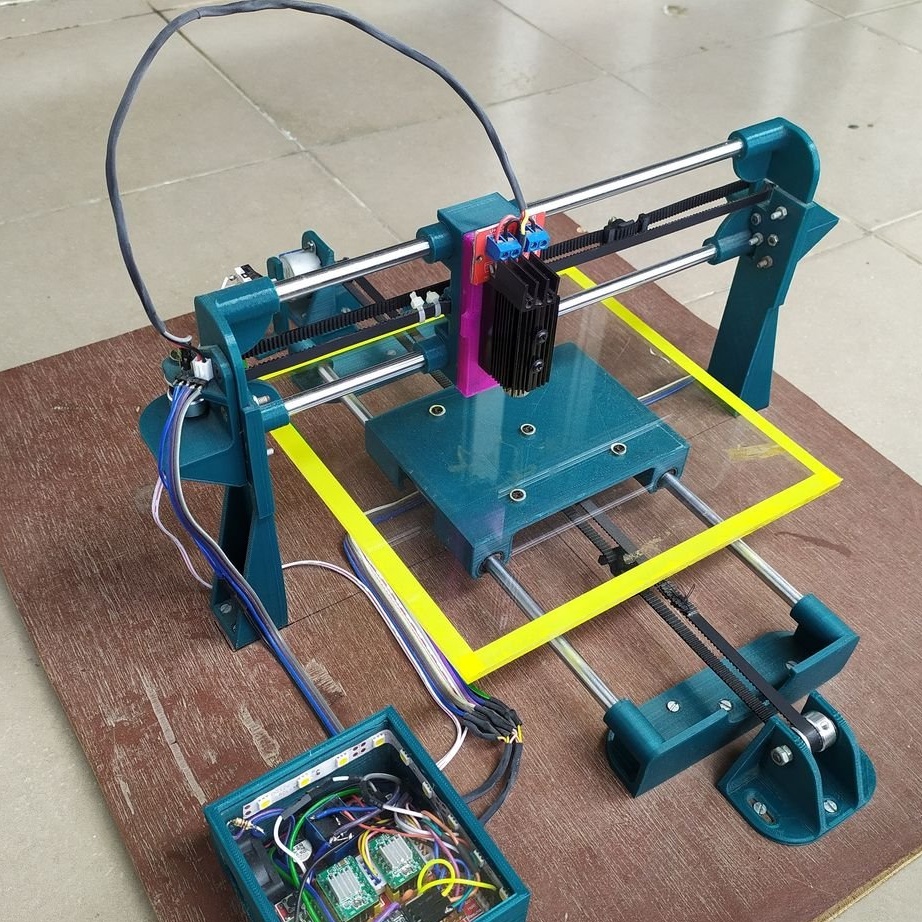
Poté se mistr rozhodl samostatně navrhnout a vyrobit rytec pomocí 3D tiskárny pro výrobu. Podél cesty se rozhodl vyrobit držák laseru modulární, aby mohl být laser snadno nahrazen perem nebo fixem. Byla také přidána funkce připojení Bluetooth.
Technické specifikace rytce jsou následující:
- Pracovní plocha 200 x 162 mm
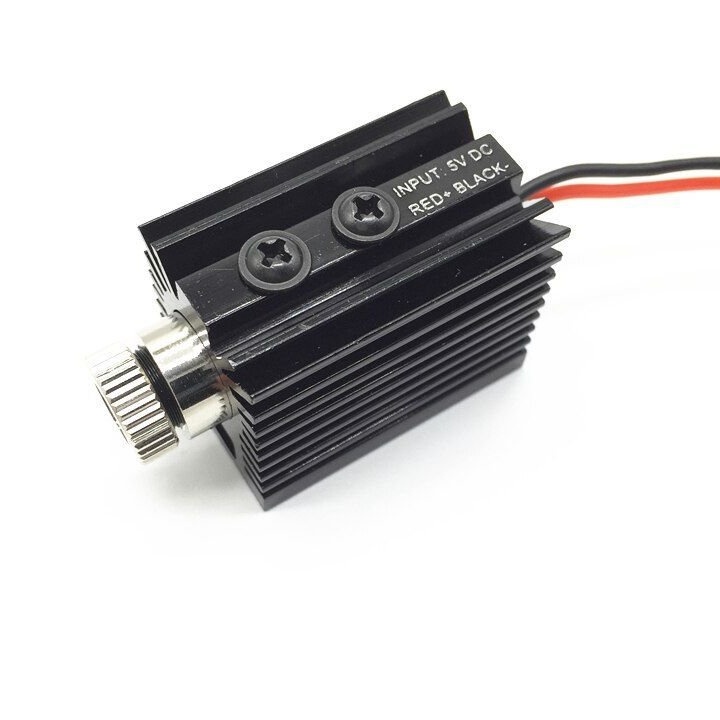
-1000 mw laserový modul
- Práce ze zdroje napájení USB (5 V)
-Auto naváděcí funkce
- Bluetooth komunikace mezi laserovým rytecem a PC
- PWM laserové ovládání. (Pomáhá při vytváření různých odstínů černé při gravírování portrétů)
-102,4 kroků na mm rozlišení
- Stroj může gravírovat, řezat a čerpat z různých materiálů

Nářadí a materiály:
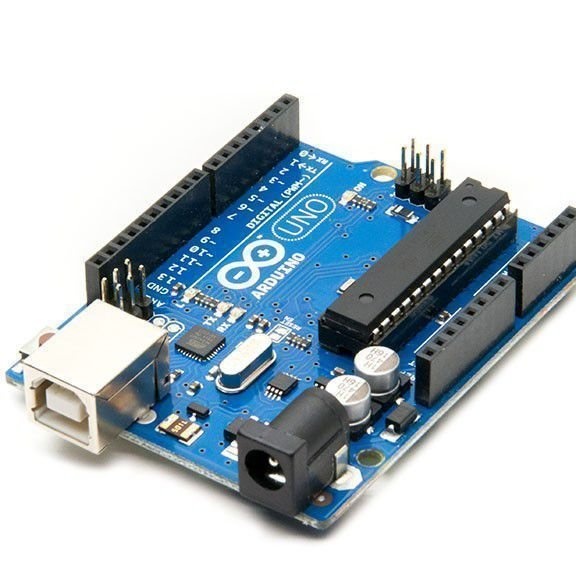
-Arduino UNO;
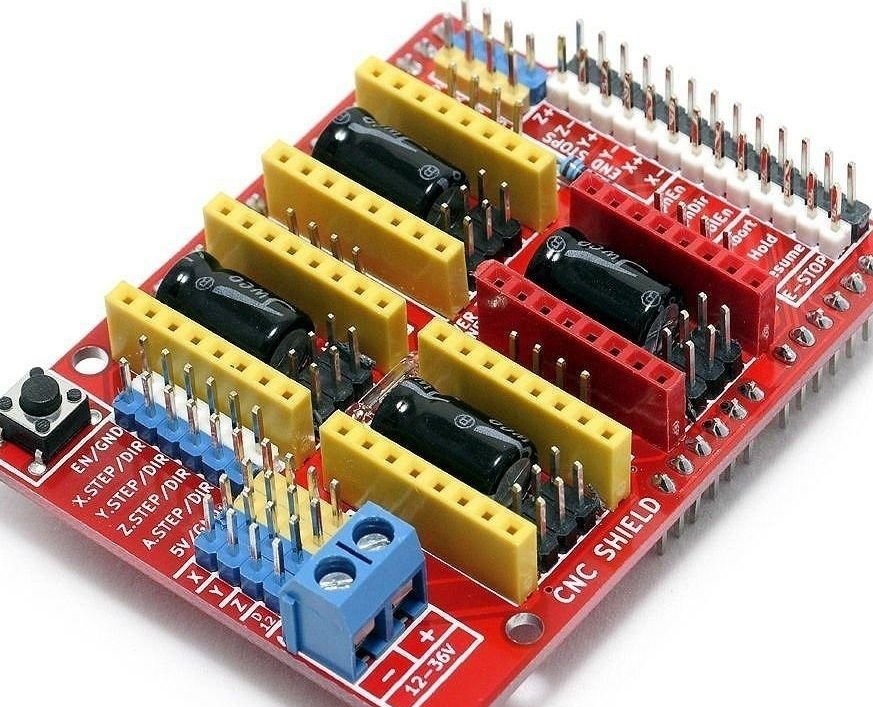
-Expanzní deska;
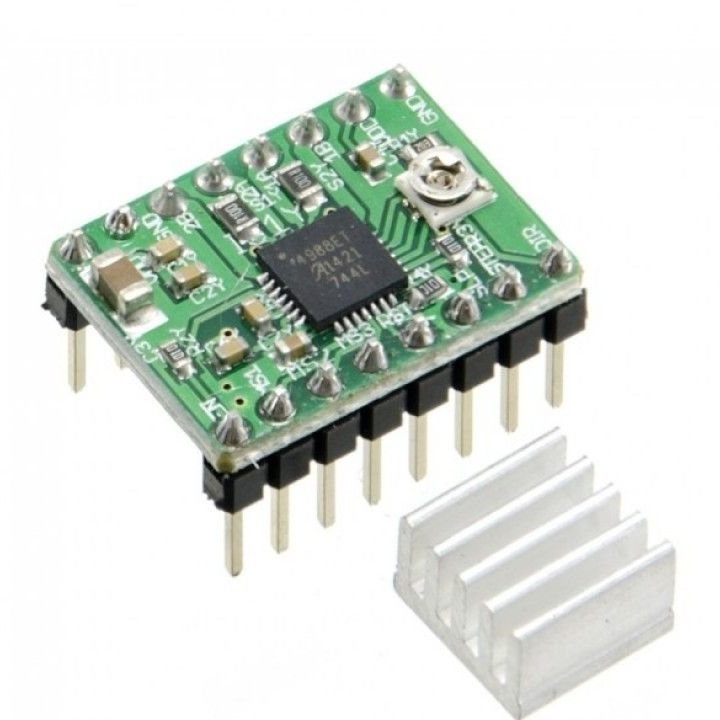
- Krokový motorový ovladač A4988 - 2 ks;
-1000 mW laserový modul;
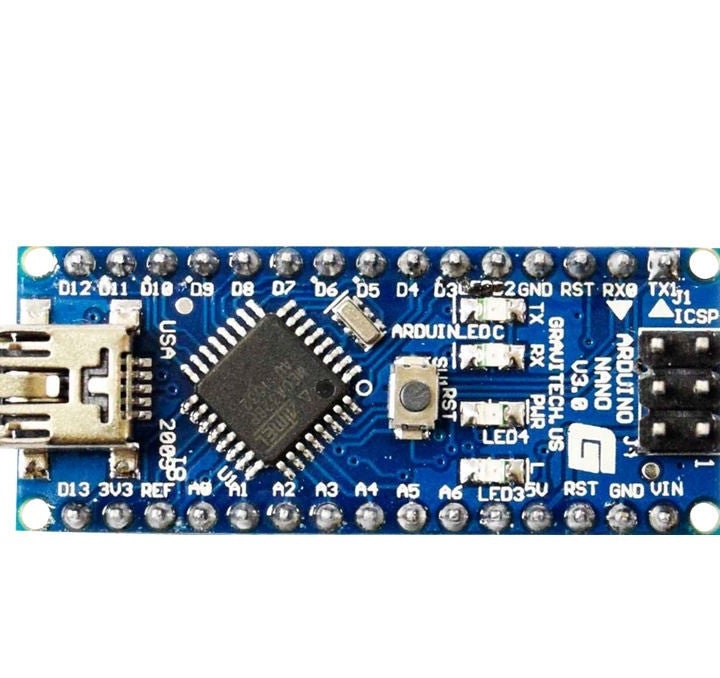
- Arduino Nano;
- XL6009 Boost Converter;
- lineární kuličková ložiska LM8UU - 6 ks;
Kladka - 4 ks;
- Průměr prutů 8 mm, délka 300 mm -4 ks;
-modul IRF520 Mosfet;
- relé;
- Koncové spínače - 2 ks;
-Step motory 2 ks;
- neodymové magnety 18 x 5 mm x 3 mm;
-30 * 30 mm 5 V chladicí ventilátor;
-Belt;
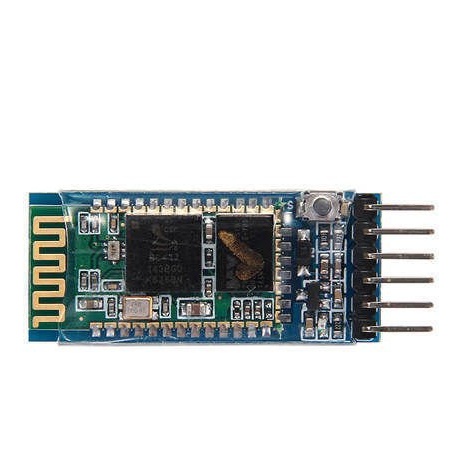
-HC-05 Bluetooth modul;
-SG90 servomotor;
Šroubové svorky
-Shrinková trubice;
- Superglue;
-Vázanky;
-Fastery
M3 30 mm
Šrouby M3 12 mm
M4 40 mm
Matice M3
Ořechy M4;
- překližka 8 mm 48 x 42 cm;
-5 mm průhledný akrylový list 22 x 22 cm;
- MicroUSB kabel;
- Odpadní papír;
-Nadfil;
- šroubovák;
-Solding příslušenství;
- Kleště;
- nůžky;
-Nippers;
- počítač se softwarem;











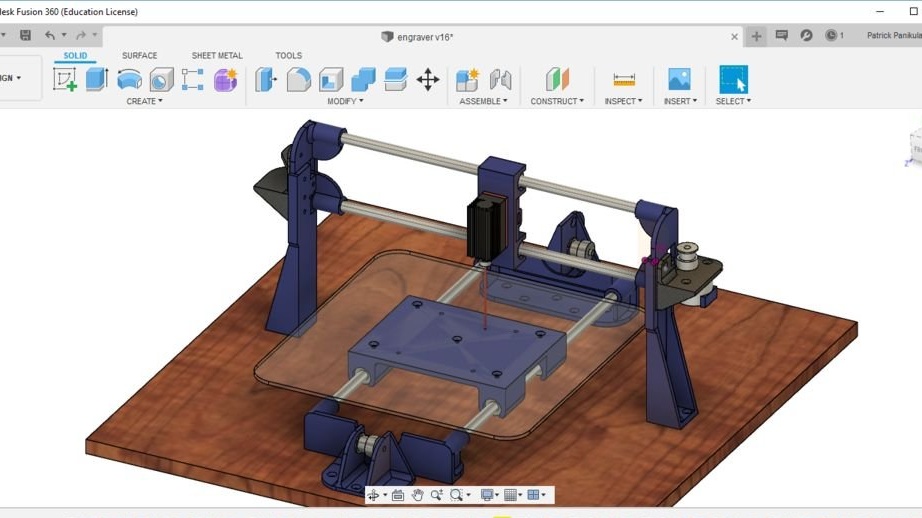
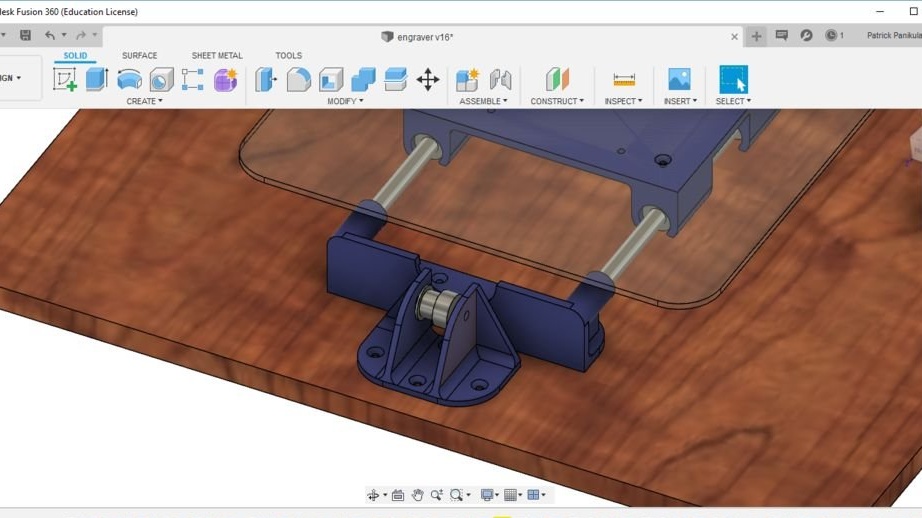
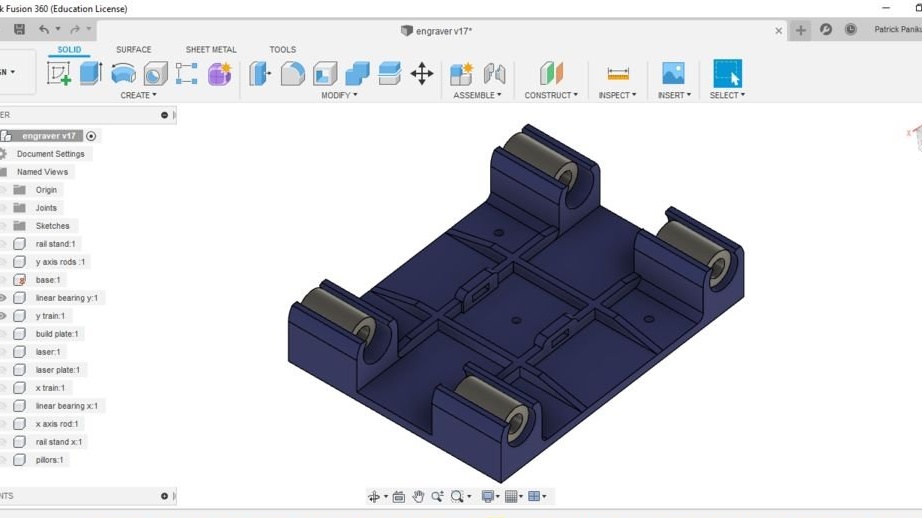
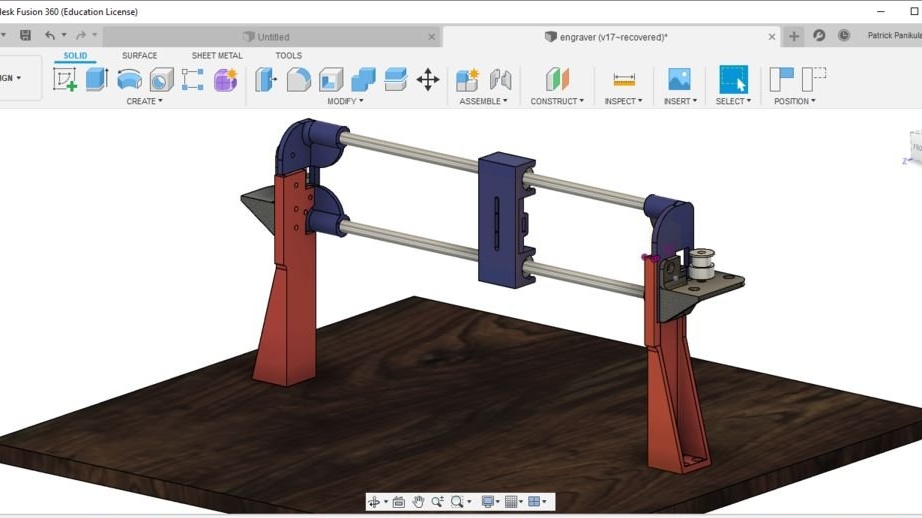
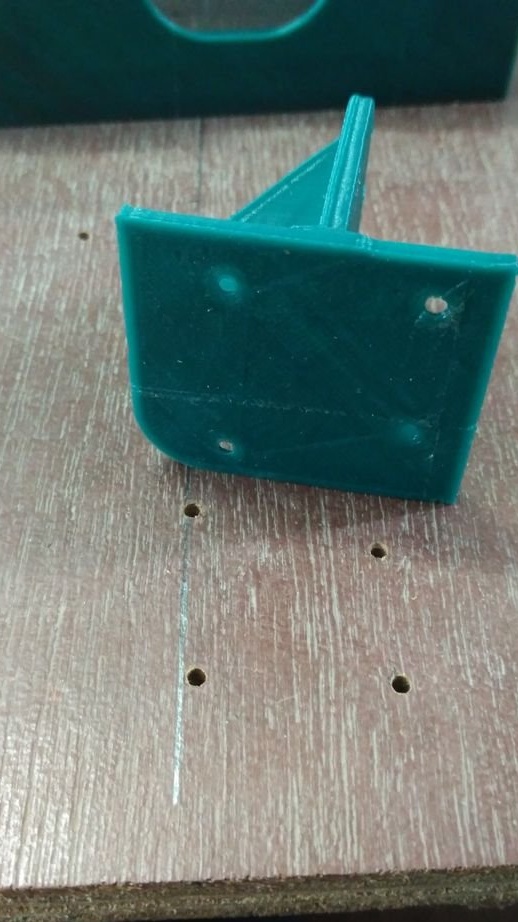
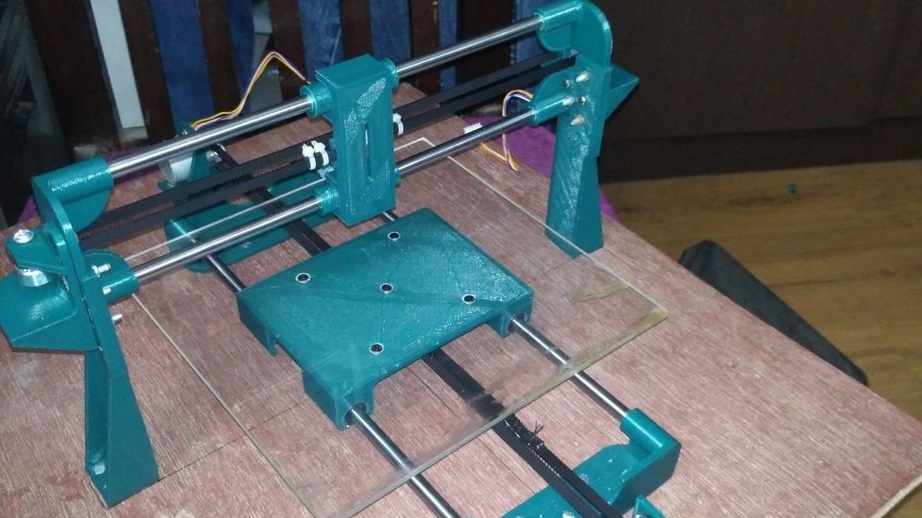
První krok: Design
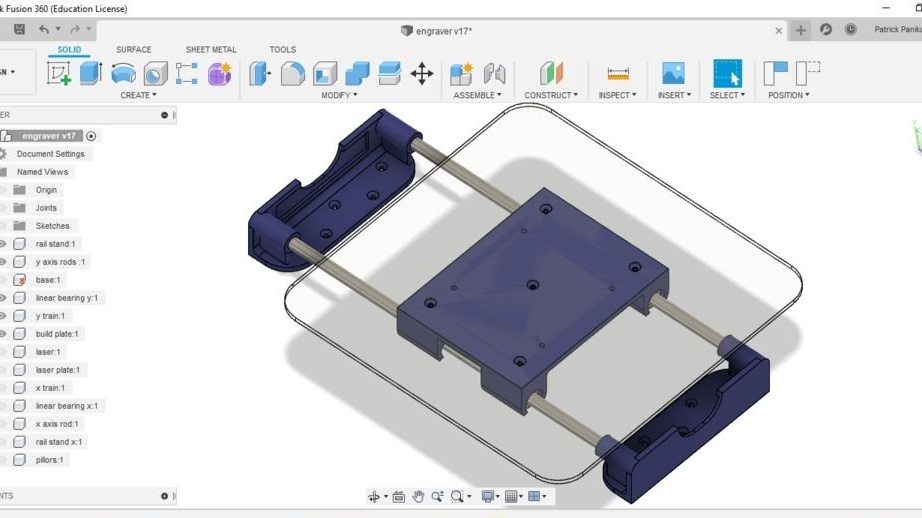
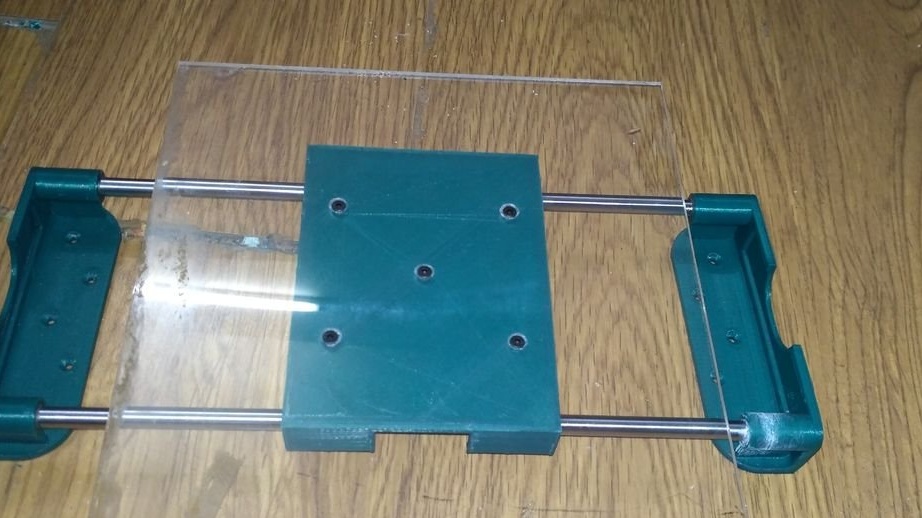
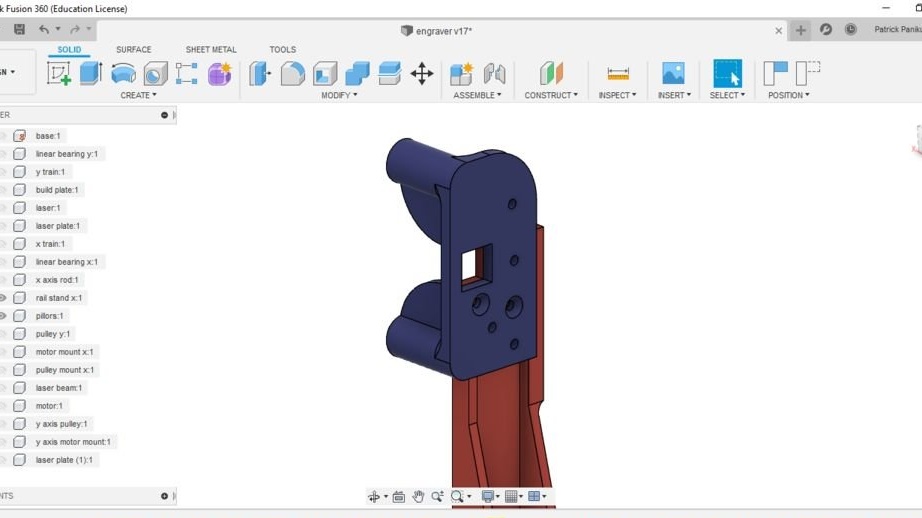
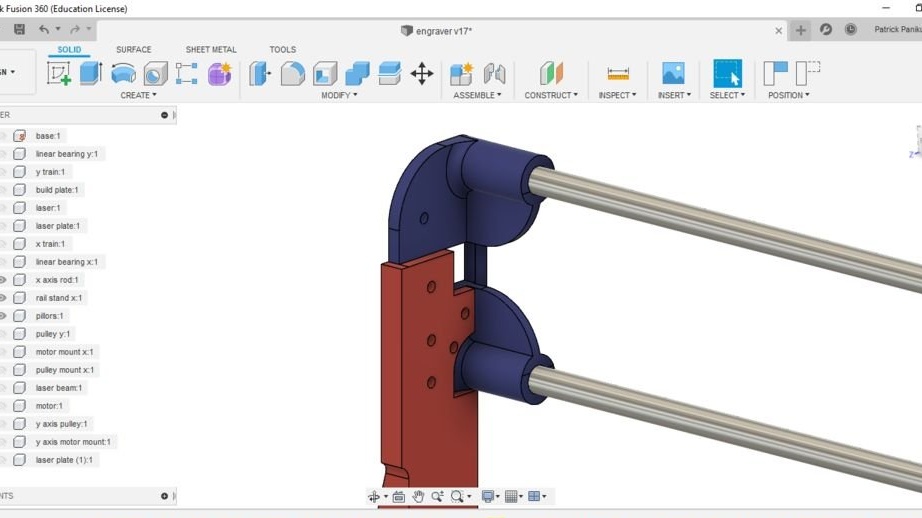
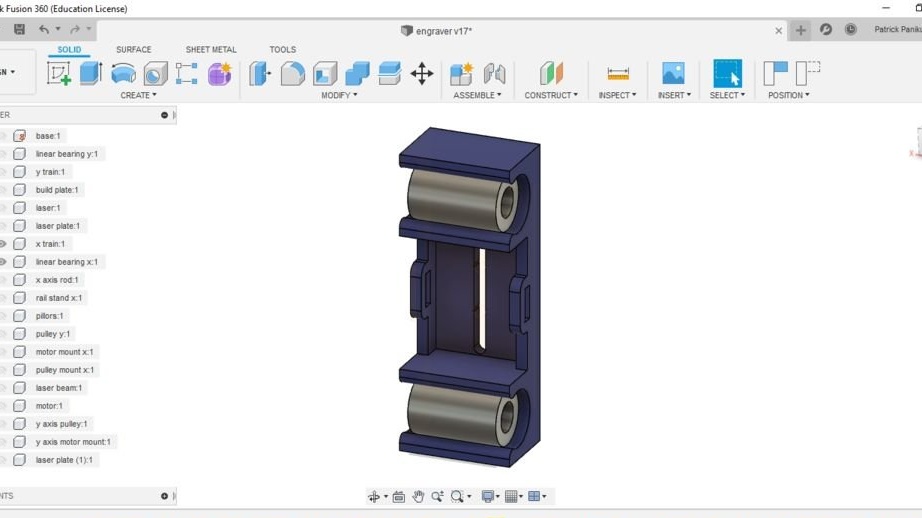
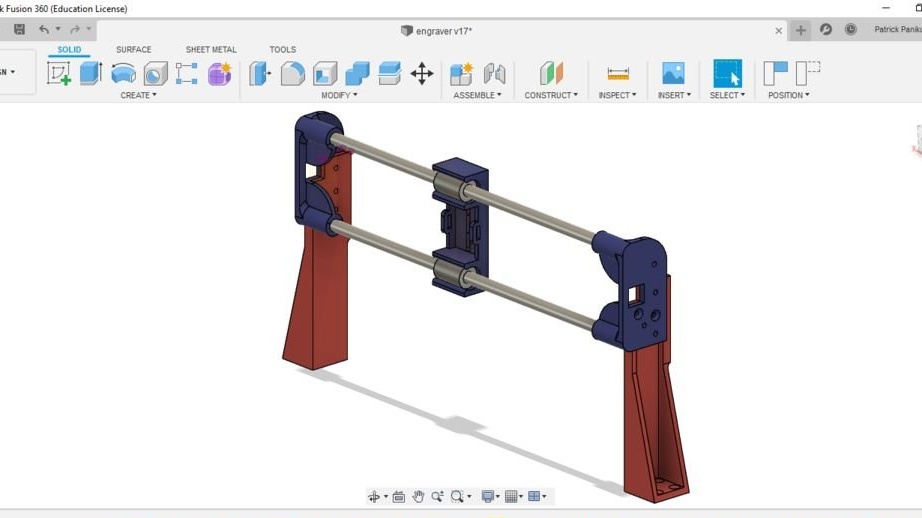
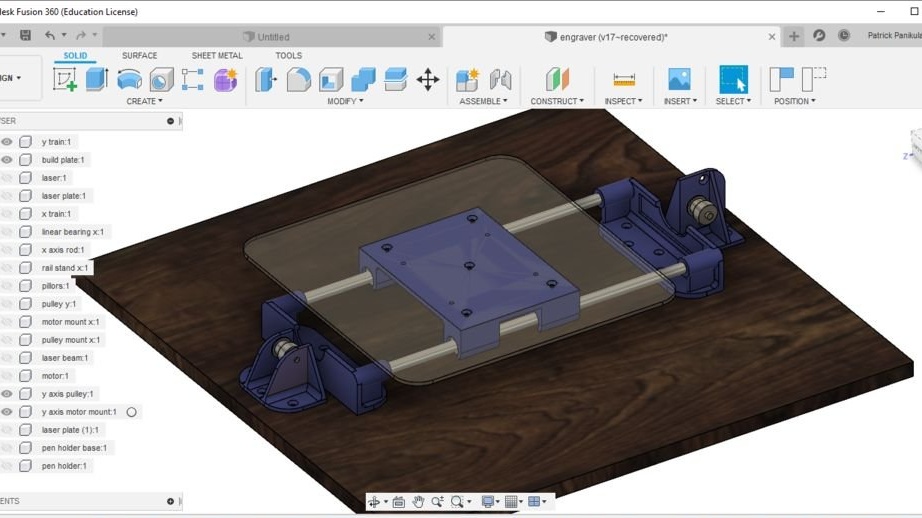
Průvodce začal navrhováním základny a držáků hřídele osy Y. Protože držáky sestávají ze dvou identických součástí, usnadnila práce se zrcadlem funkce Fusion 360. Při vývoji tohoto laserového rytce byla několikrát použita zrcadlová funkce.Na rozdíl od jiného softwaru CAD je jednou z velkých funkcí Fusion 360 to, že vám umožňuje vytvářet na jedné obrazovce více komponent s odkazem na jiné komponenty, tj. model mohou být navrženy sestavené.
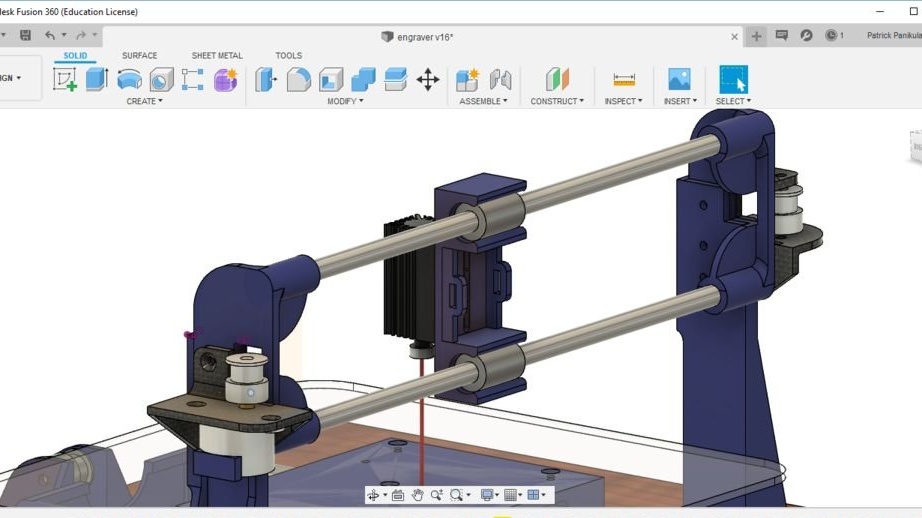
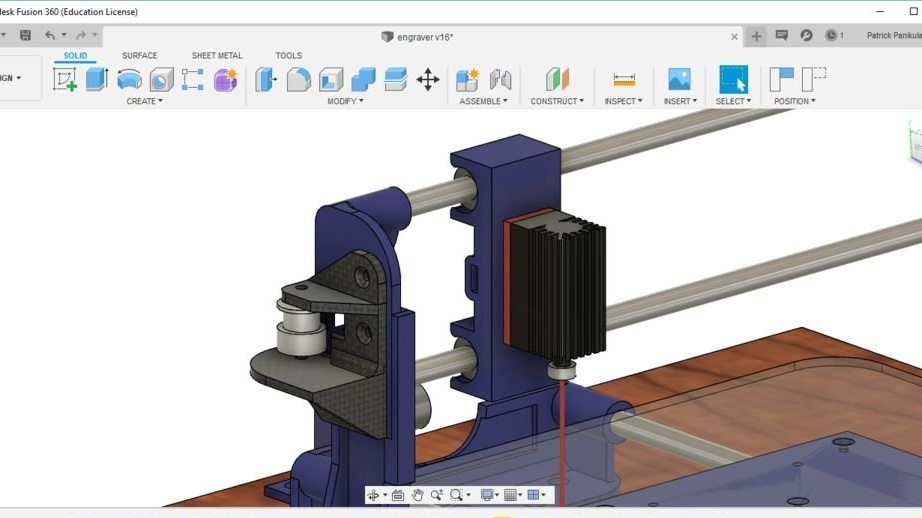
Výška vodítek os X závisí na ohniskové délce použitého laseru. Musíte se jen ujistit, že výška laseru je v tomto rozsahu. Konečné zaostření laserového paprsku lze provést úpravou čočky na laseru.
Fusion 360 také umožňuje zvolit vzhled a materiál součástí, aby výsledný design vypadal realisticky. Program umožňuje převádět a ukládat vyvinuté komponenty přímo ve formátu STL pro 3D tisk.
Níže si můžete stáhnout soubor Fusion 360 s projektem rytce.
laserový rytec v16.f3d
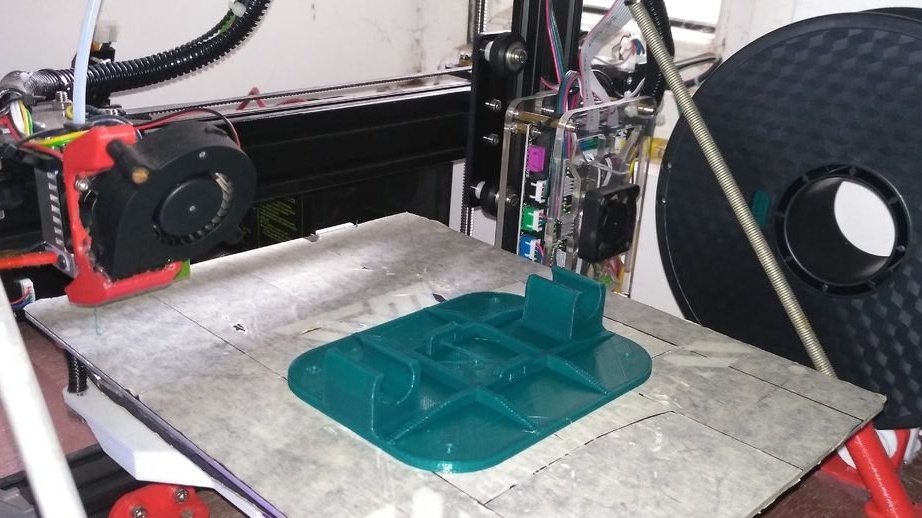
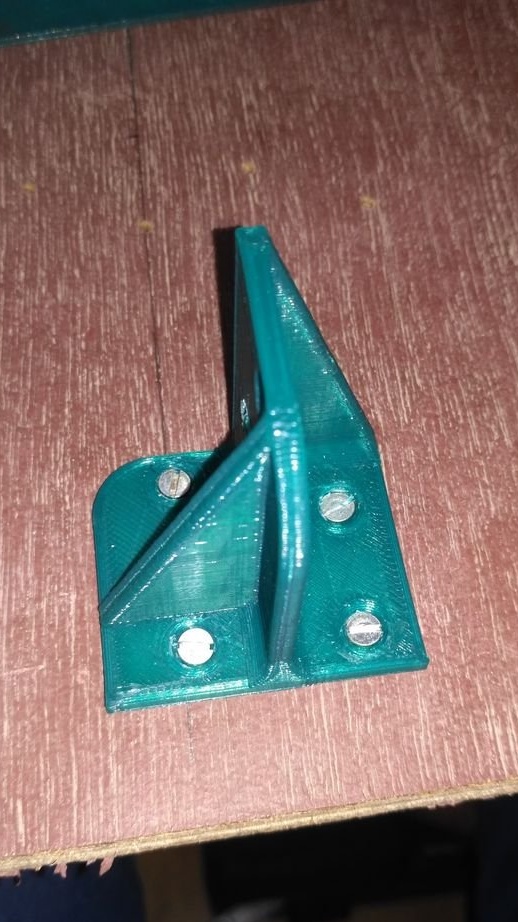
Krok 2: 3D tisk
Poté průvodce začne tisknout podrobnosti. Všechny části jsou navrženy tak, aby je bylo možné snadno tisknout na 3D tiskárně bez podpory.
Průvodce vytiskne podrobnosti na 3D tiskárně TEVO.
Materiál: PLA (tmavě zelená)
Výška vrstvy: 0,3 mm
Plnění: 30%
Tloušťka stěny: 0,8 mm
Tloušťka horní / dolní: 0,9 mm
Kliknutím na tento soubor si můžete stáhnout soubory pro tisk odkaz.

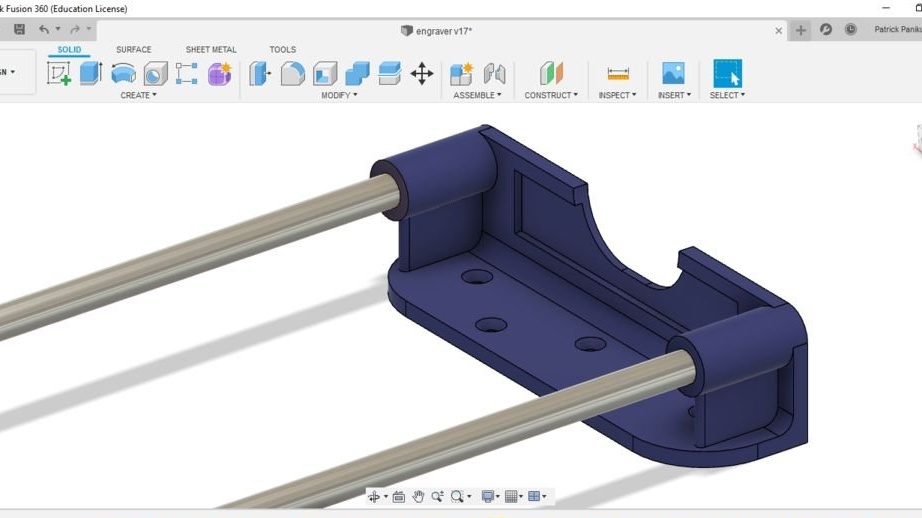
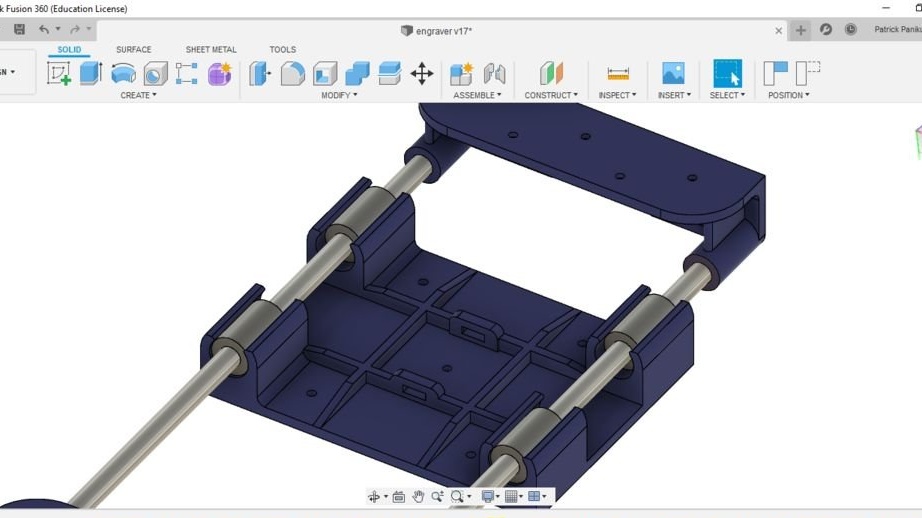
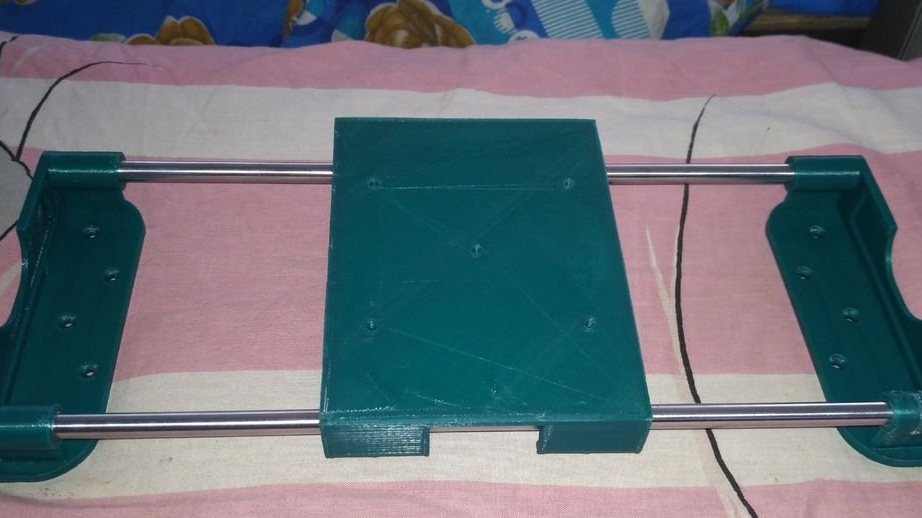
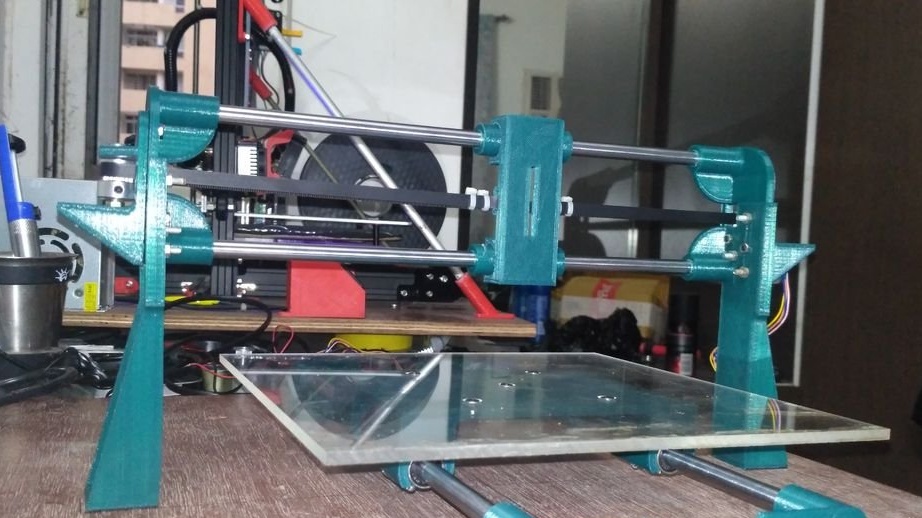
Krok 3: Sestavení osy Y.
Průvodce vám doporučuje otevřít sestavovací soubor Fusion 360 PC před sestavením. To pomáhá, aby byl proces sestavení srozumitelnější.
Průvodce nainstaluje tyče a lineární ložiska. Master byl navržen tak, aby nedocházelo k lepení dílů, tj. fit je těsný. Tyče musí být naplněny do sedla kladivem.
Po montáži se ujistěte, že se vozík volně pohybuje.
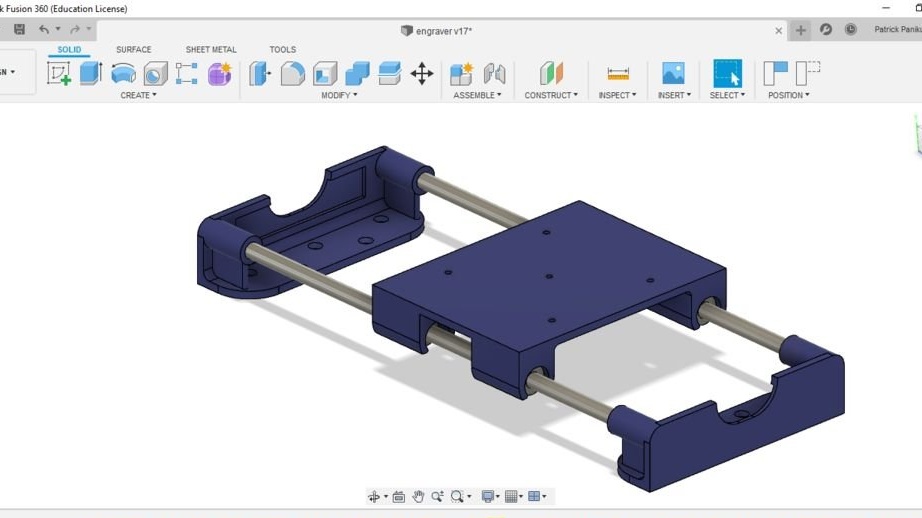



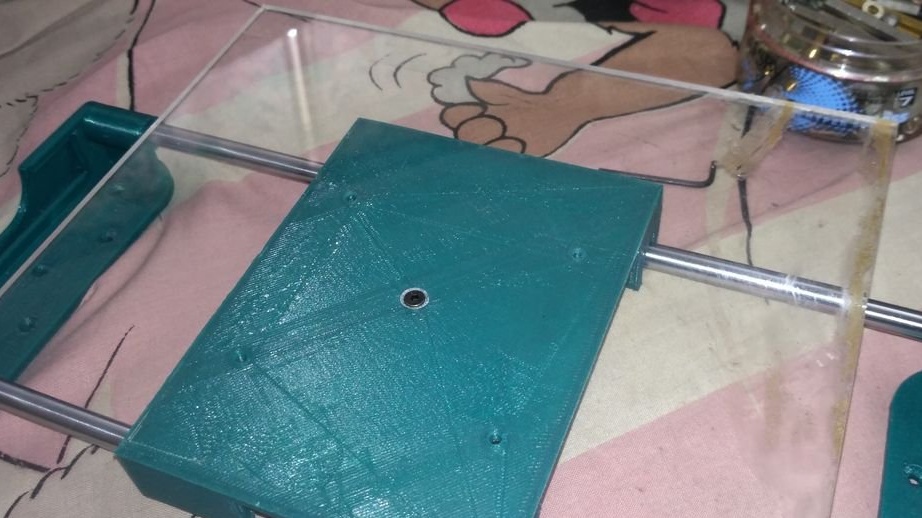
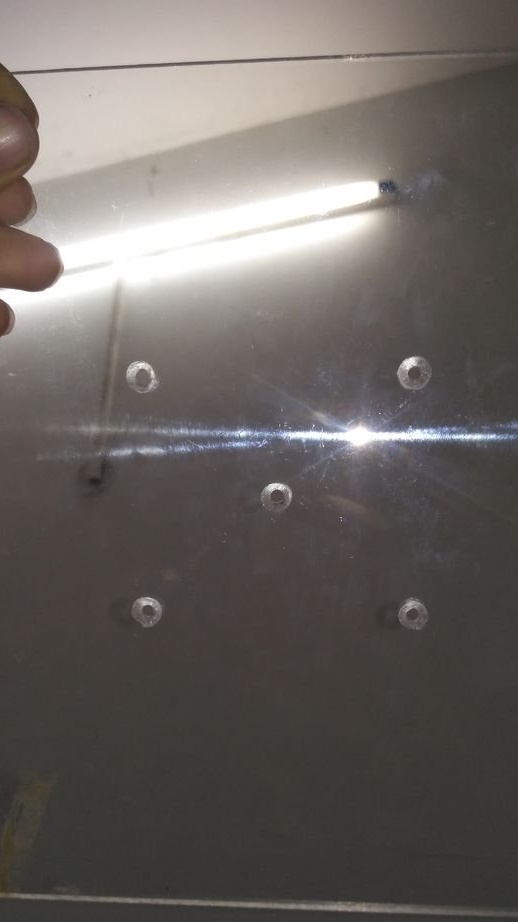
Krok 4: Desktop
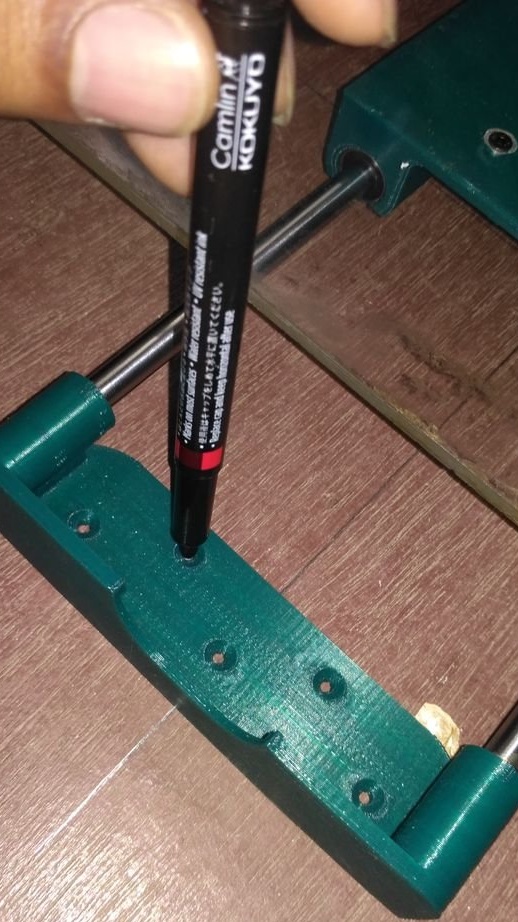
Na akrylový list se vyvrtá díra. Přišroubujte list k vozíku a nastaví jeho okraje přesně rovnoběžně s okraji vozíku. Označí a vyvrtá čtyři montážní otvory. Šrouby akrylové k vozíku.





Krok 5: osa X
Poté Master sbírá osu X. Vodítka pro osu byla tisknuta masterem, protože ty, které koupil, se ukázaly být vadné. Podle něj tyto vodítka po broušení a mazání nefungují horší než ty zakoupené.





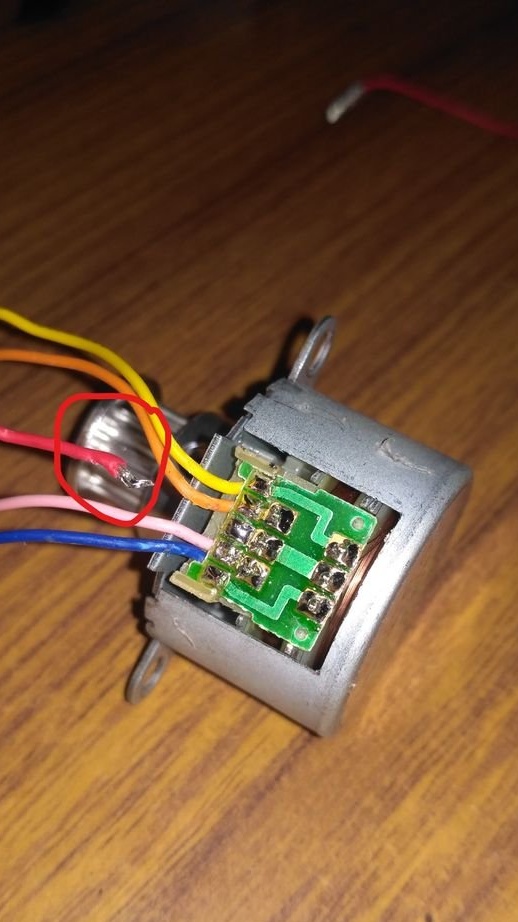
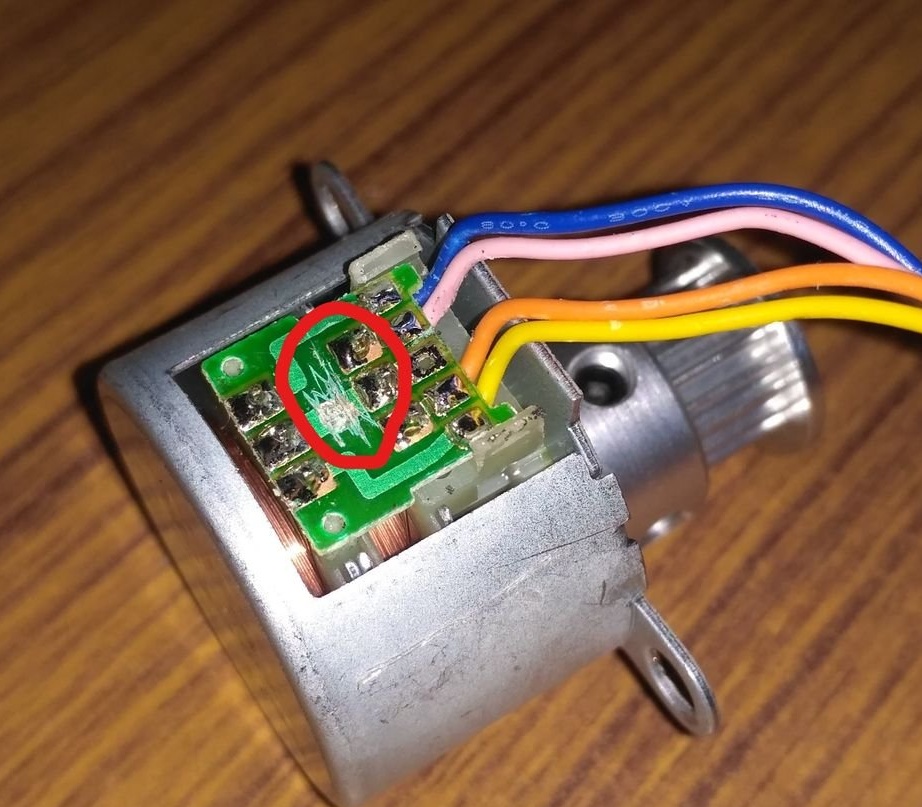
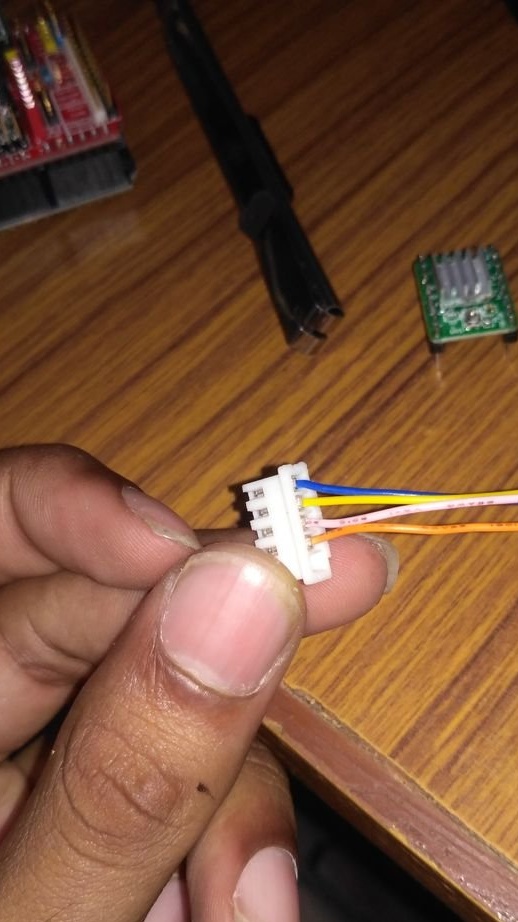
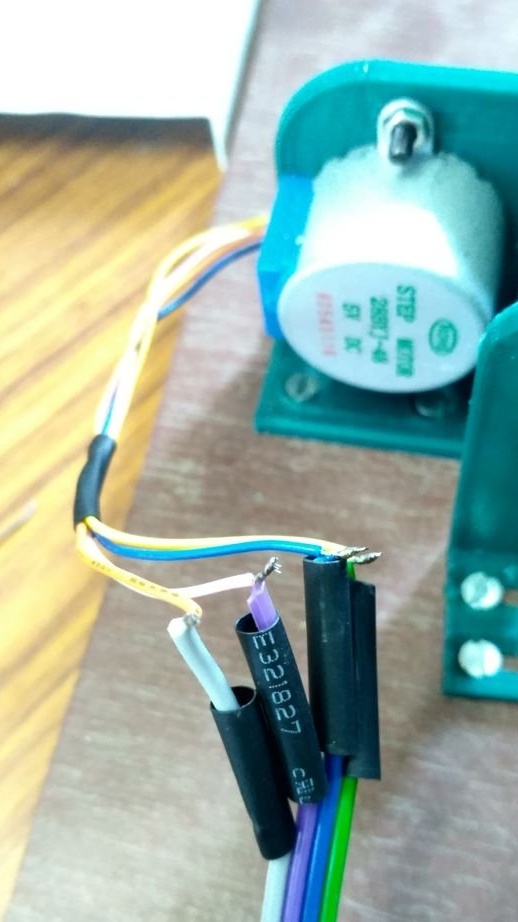
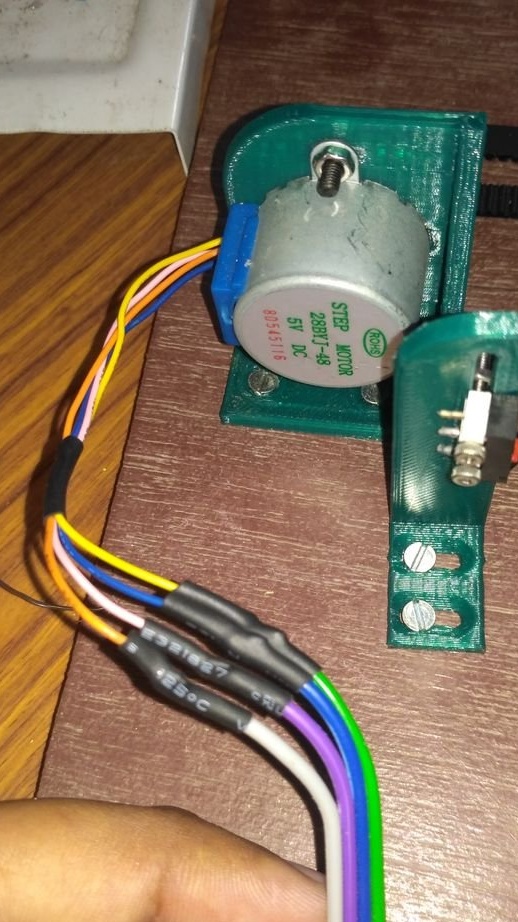
Krok 6: přepracování unipolárního motoru 28BYJ-48 na bipolární
Existují dva hlavní důvody, proč potřebujete převést unipolární motor na bipolární motor.
Algoritmus řízení bipolárního motoru pomocí ovladače krokového motoru A4988 je jednodušší než ovládání unipolárního motoru
Rozšiřující deska podporuje pouze bipolární krokové motory.
Můžete předělat motor ve třech krocích.
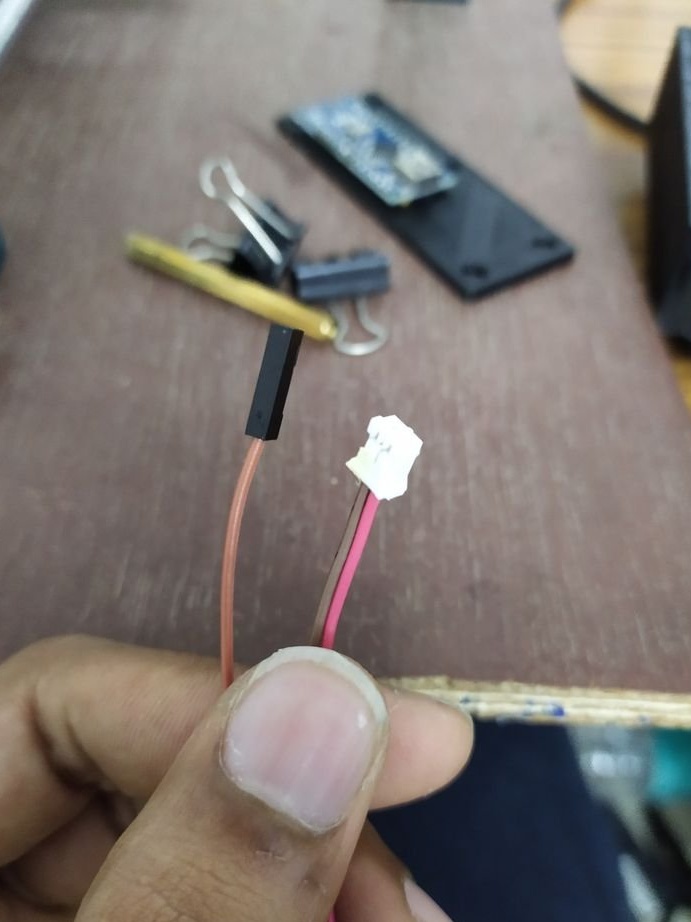
Otevřete modré plastové pouzdro a odpojte červený vodič od desky, jak je znázorněno na první fotografii.
Nyní musíte poškodit skladbu, jako na druhé fotografii a změnit dráty v bloku, jako na třetí fotografii.
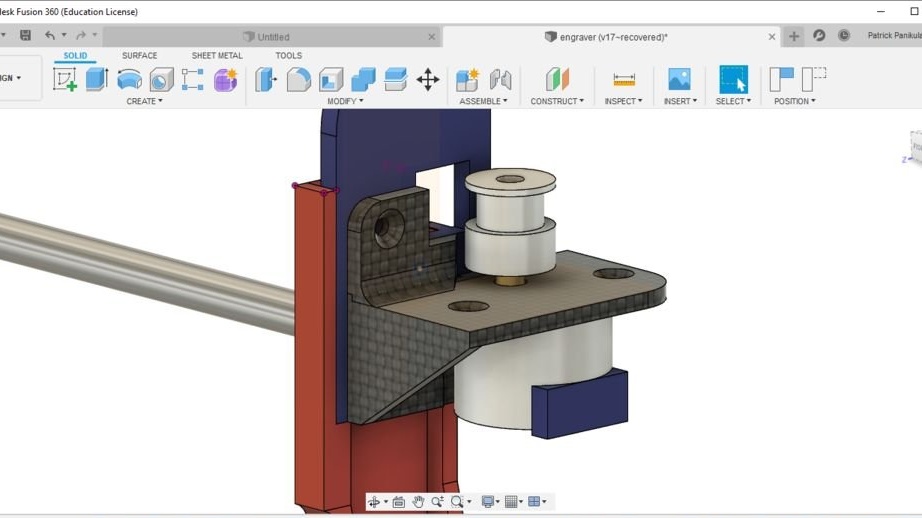
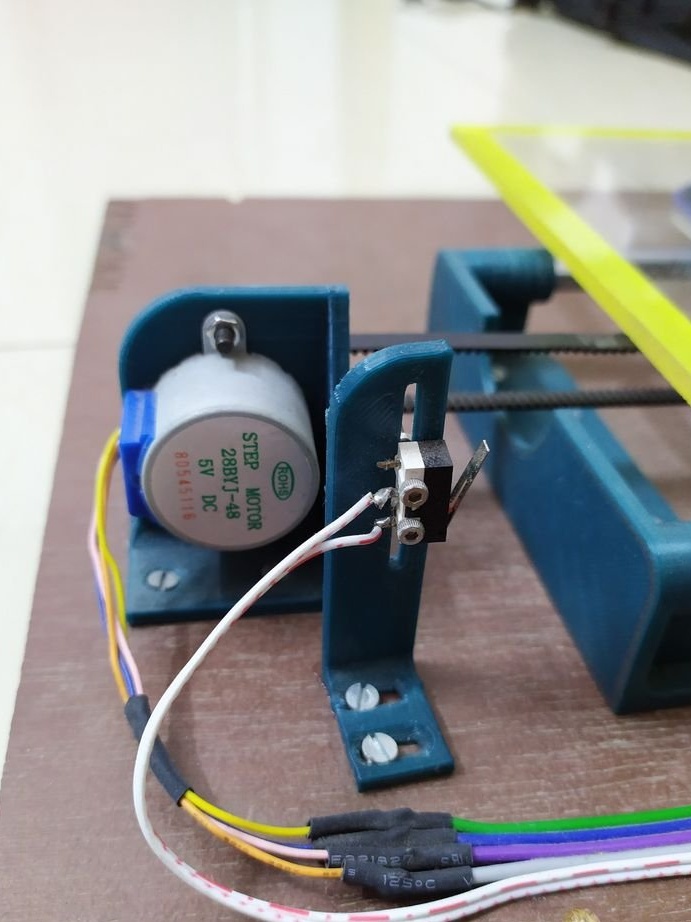
Sedmý krok: instalace motoru, řemenice, řemene
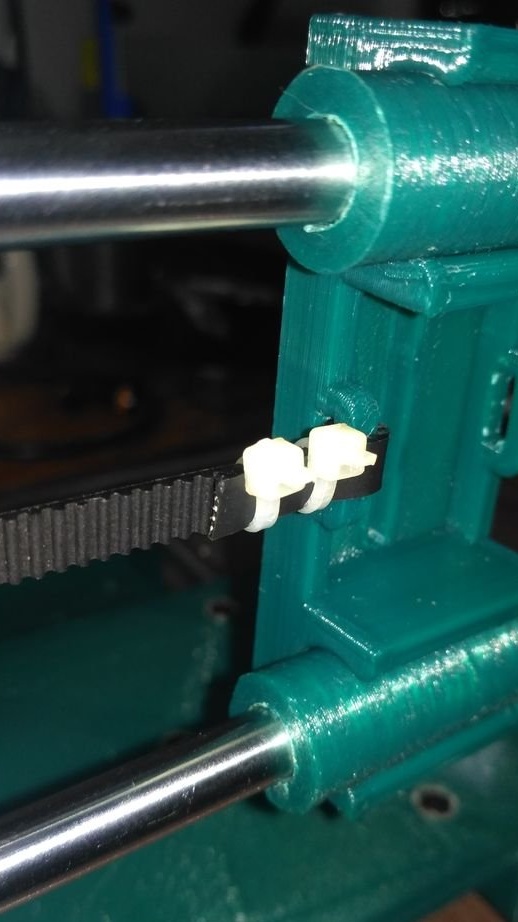
Nainstaluje motor. Na hřídeli motor zajišťuje řemenici. Druhá kladka se posadí na opačnou stranu motoru. Upevňuje konec řemenu pomocí spon. Prochází druhým koncem řemenu kladkami a také se upevňuje.



Krok osm: Nadace
Základna je vyrobena z překližky. K němu pán připojí osu X.







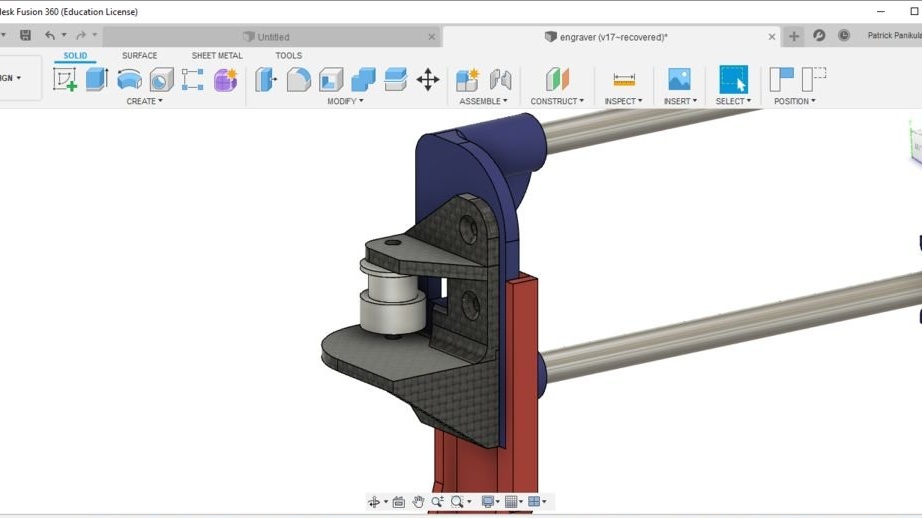
Krok devět: osa Y
Shromažďuje osu Y. To je obtížný krok.
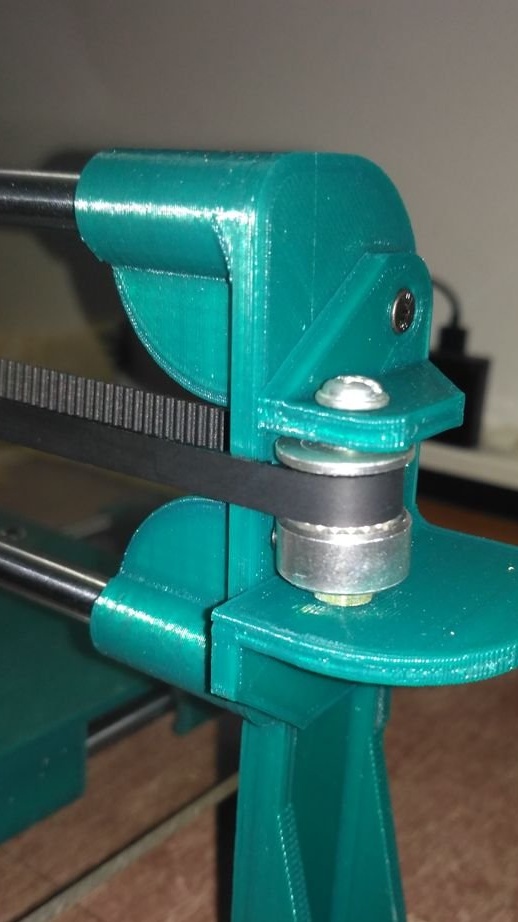
Sestavte držák kladky pomocí držáku kladky osy Y, kladky, šroubu / matice M4 40 mm a kovových podložek, jak je znázorněno na prvních dvou fotografiích.


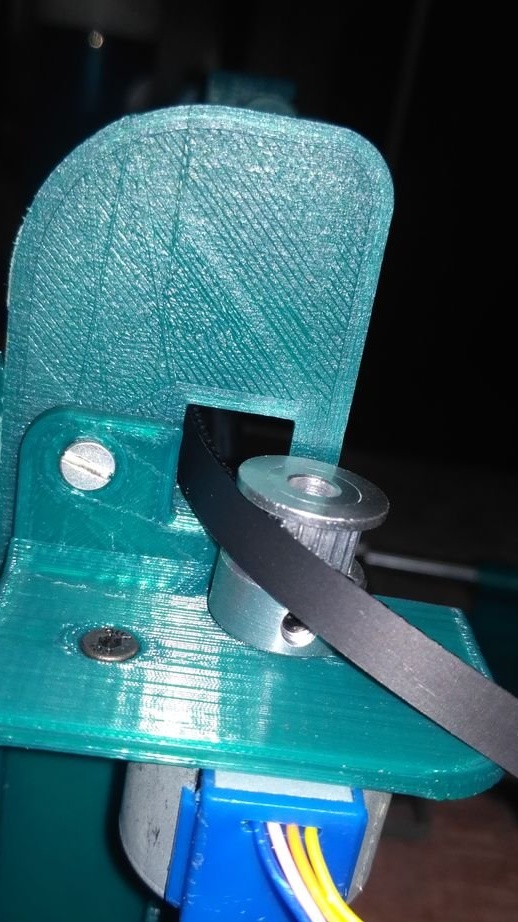
Nyní připojte jeden konec rozvodového řemene k jednomu ze štěrbin pod podvozkem osy Y.
Volný konec řemenu protáhněte sestavou řemenice, kterou jste dříve vytvořili, a poté ji zacvakněte do druhé drážky umístěné pod vozíkem osy Y.
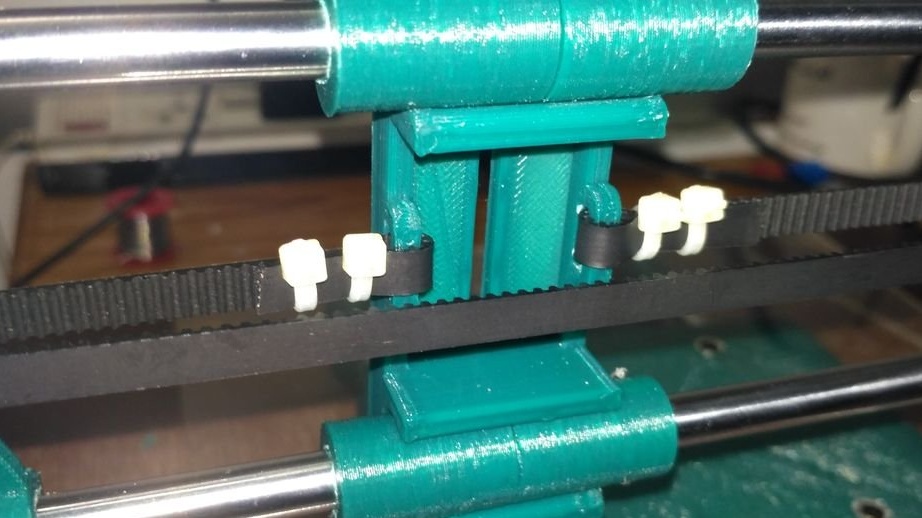
Po dokončení těchto 3 kroků je třeba sestavu osy Y přišroubovat k překližkové základně.



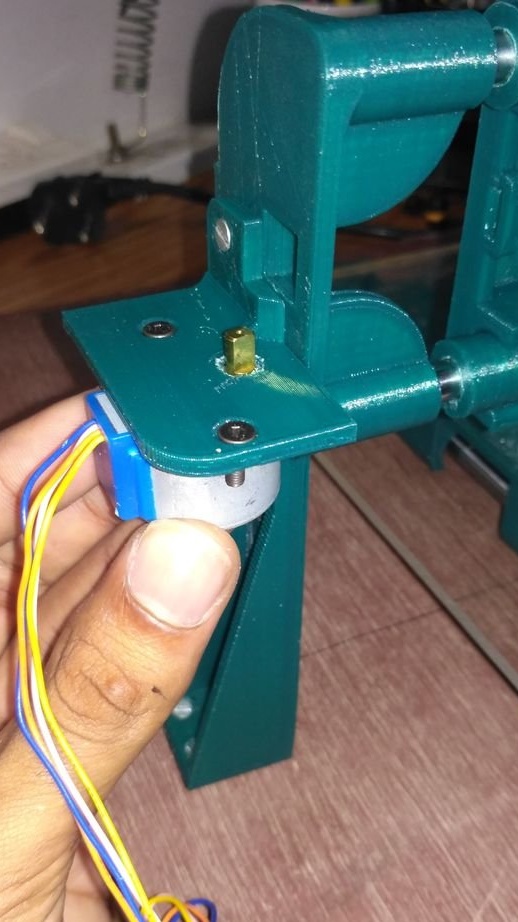
Připojte krokový motor k uchycení motoru na ose Y pomocí dvou šroubů a matic M3 12 mm.
Nyní přišroubujte držák řemenice osy Y a montáž motoru k základně překližky.Udělejte to po nastavení obou stran, abyste dosáhli správného napnutí řemenu. Napínač řemene bude přidán později.

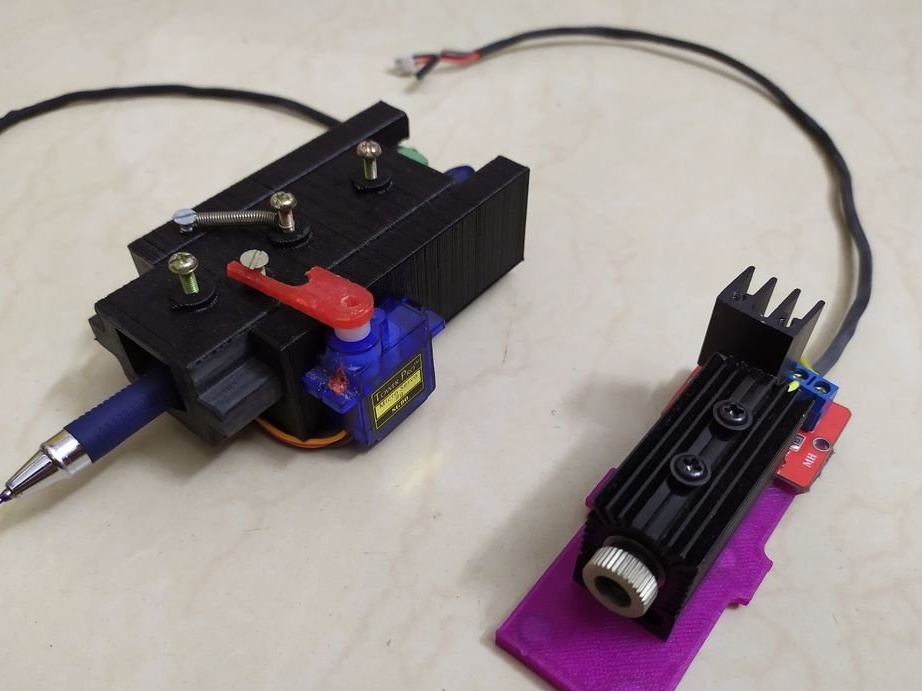
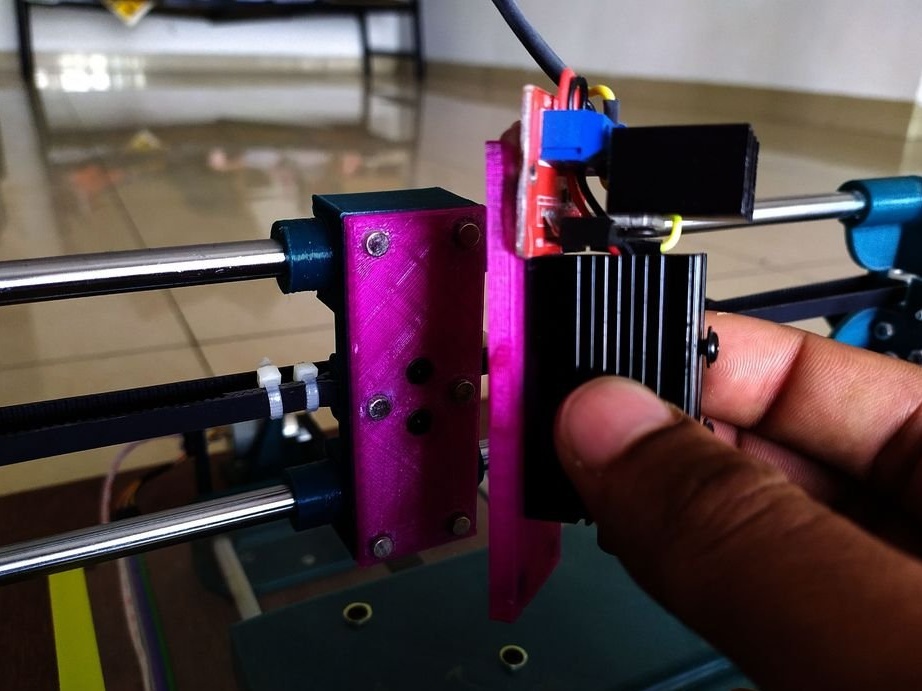
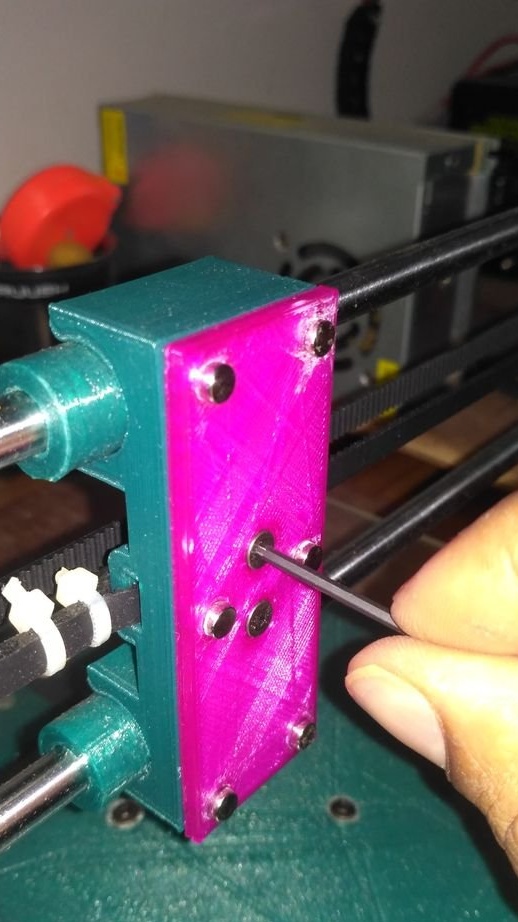
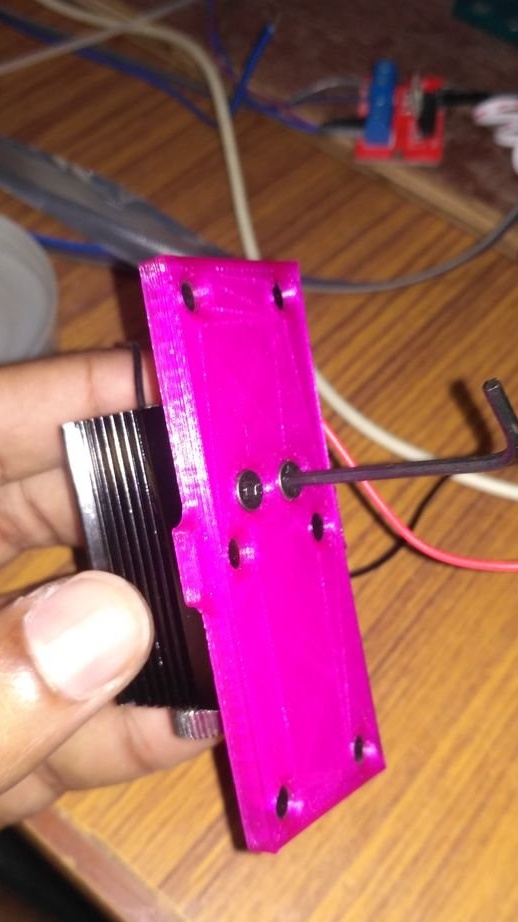
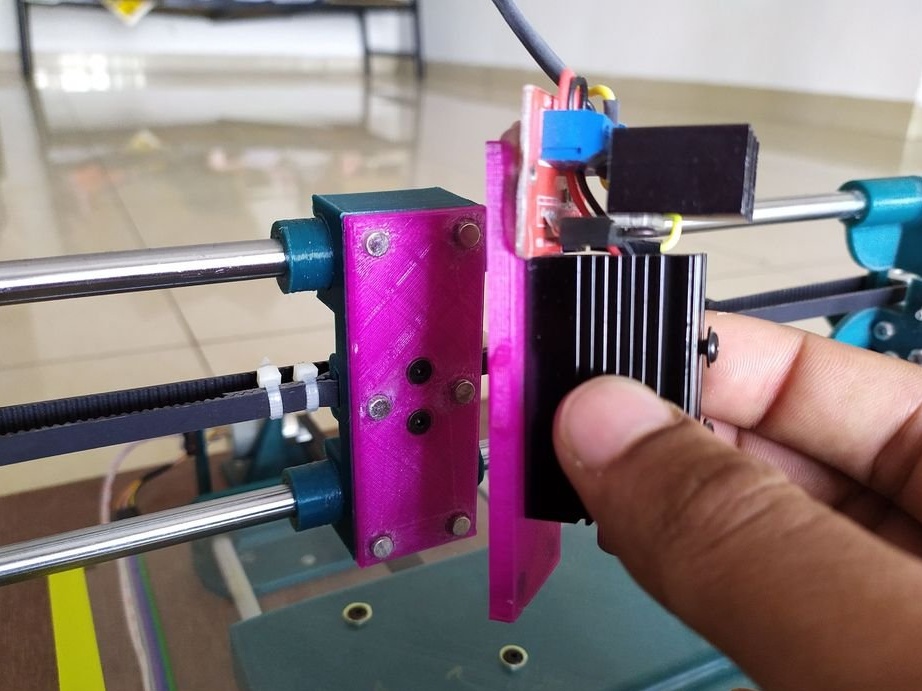
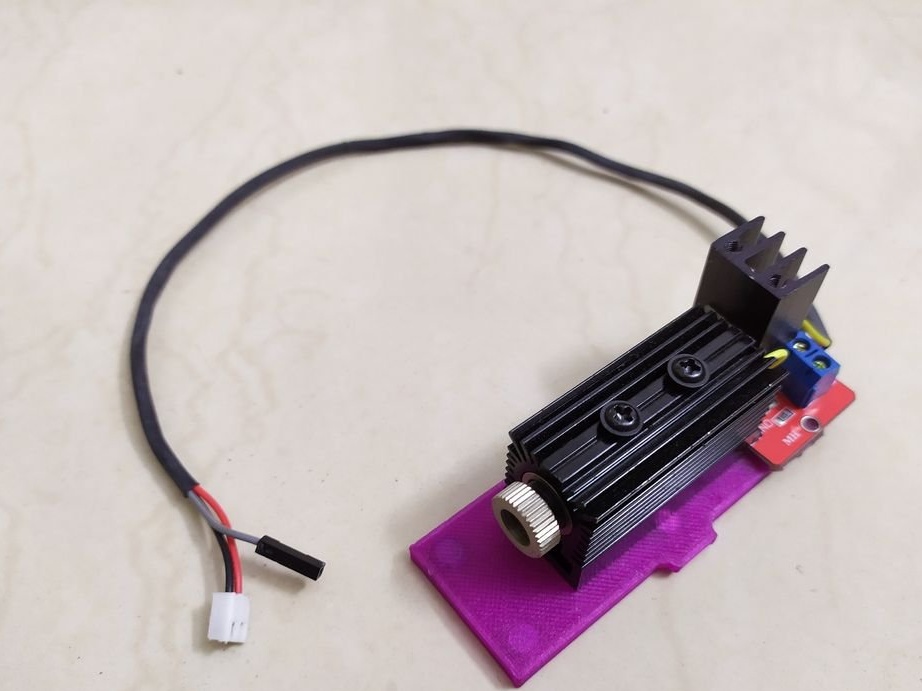
Krok 10: Laserový modul
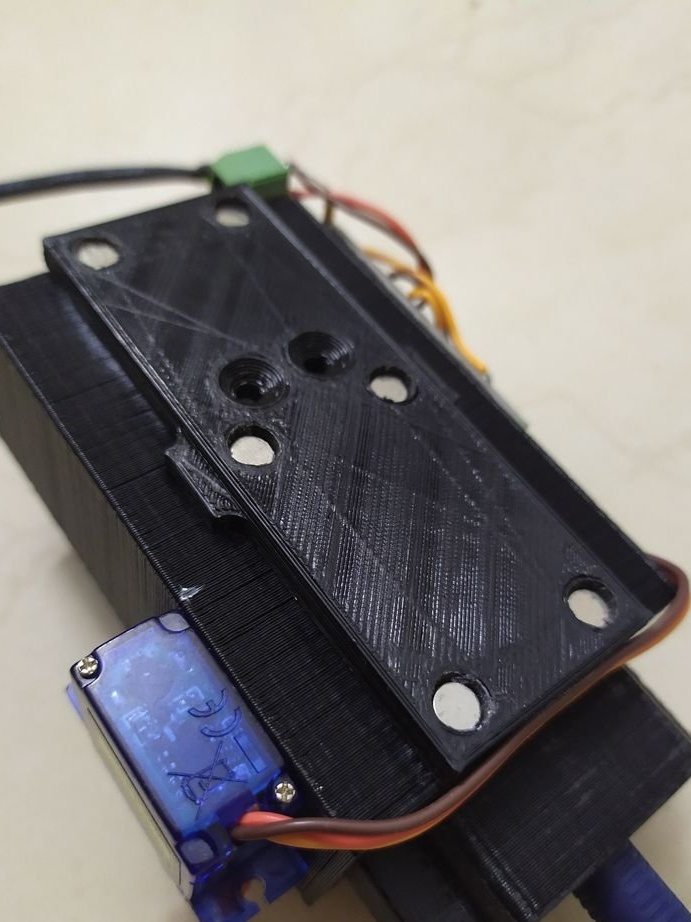
Jak je uvedeno ve specifikacích, stroj implementoval rychlou výměnu laserového modulu za jiné výkonné moduly. Za tímto účelem vyrobil pán dvě obdélníkové části (kryty). V každém je instalováno šest neodymových magnetů. Jeden kryt je připevněn k ose X, laserový modul je připojen k druhému.
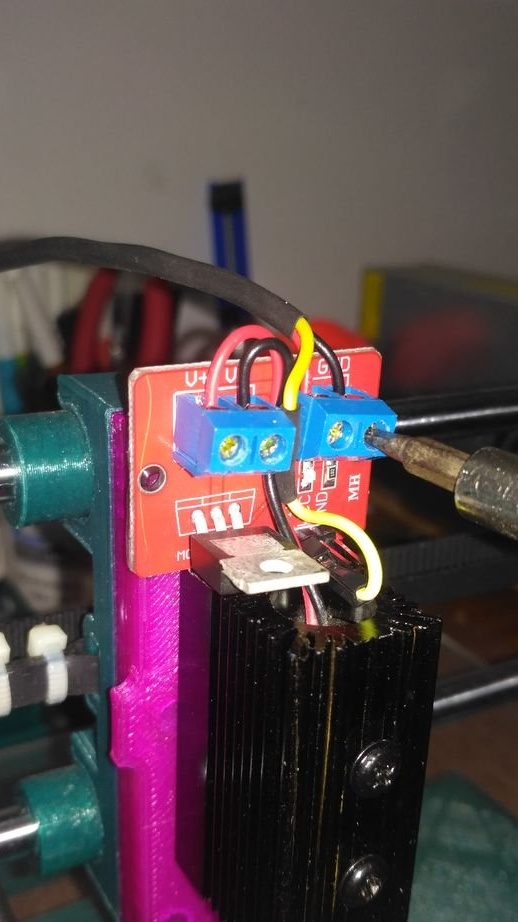
Vodiče jsou namontovány následujícím způsobem.
lasery + a - jsou připojeny k V + a V- modulu MOSFET. Napájení je připojeno k VCC a GND. Signální vodič je připojen ke signálnímu kolíku modulu MOSFET.

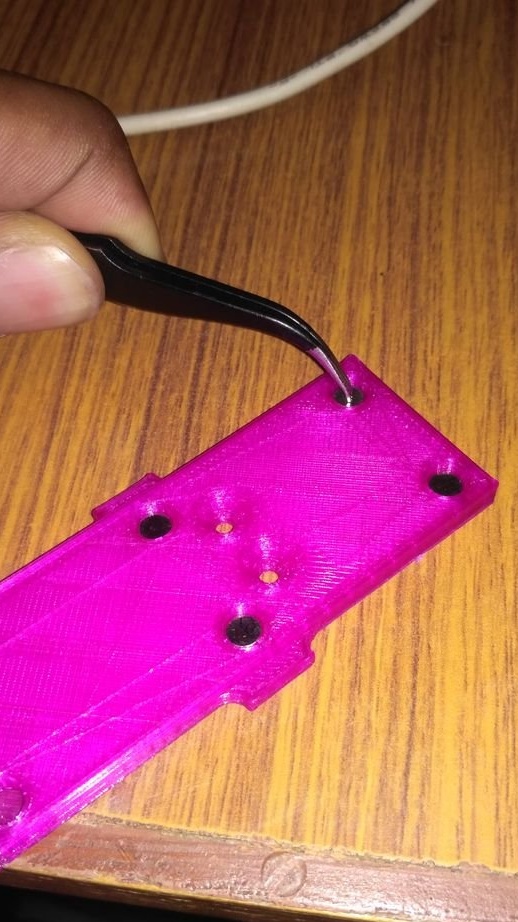



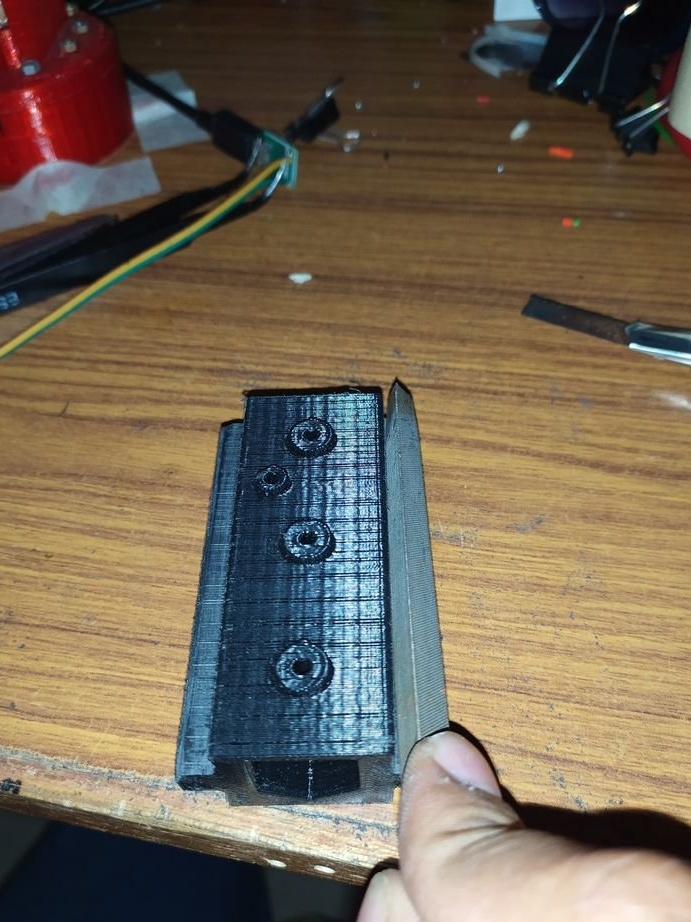
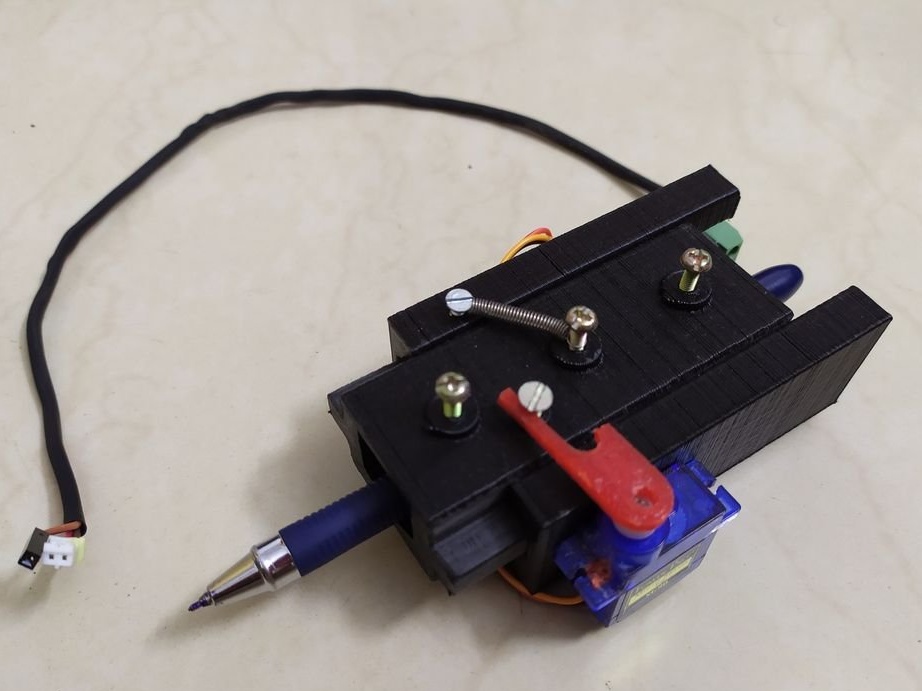
Krok jedenáct: plotr
Sbírá plotr. Jakmile jsou obě části vytištěny, hlavní jednotka vyleští roviny, které jsou ve vzájemném kontaktu, vyhlazuje je pomocí pilníku a brusného papíru, dokud obě části neklouzají spolu s velmi malým třením.



Nyní utáhne šrouby M3 40 mm a nastaví pružinu.
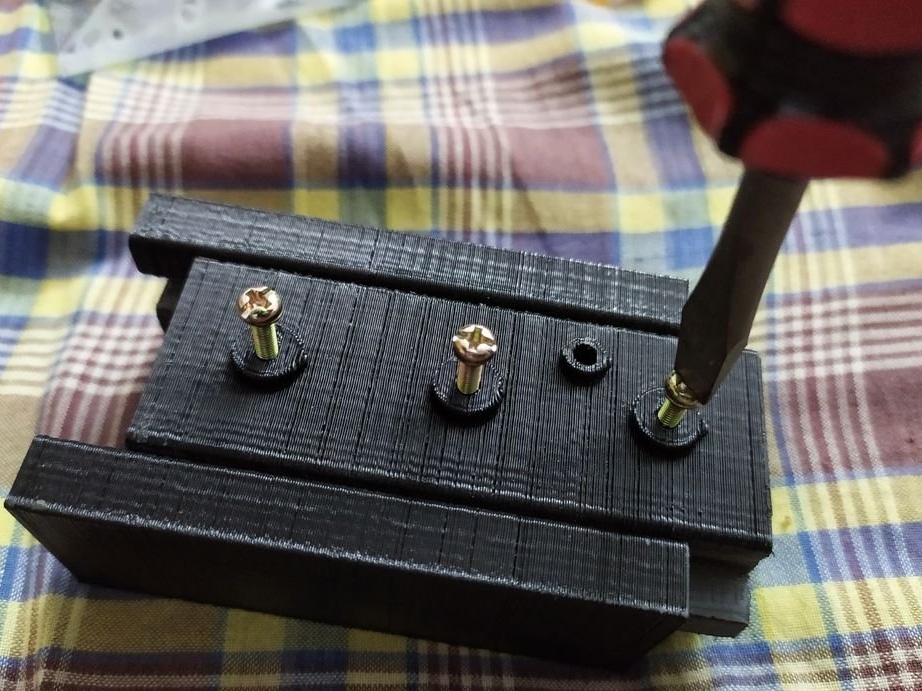
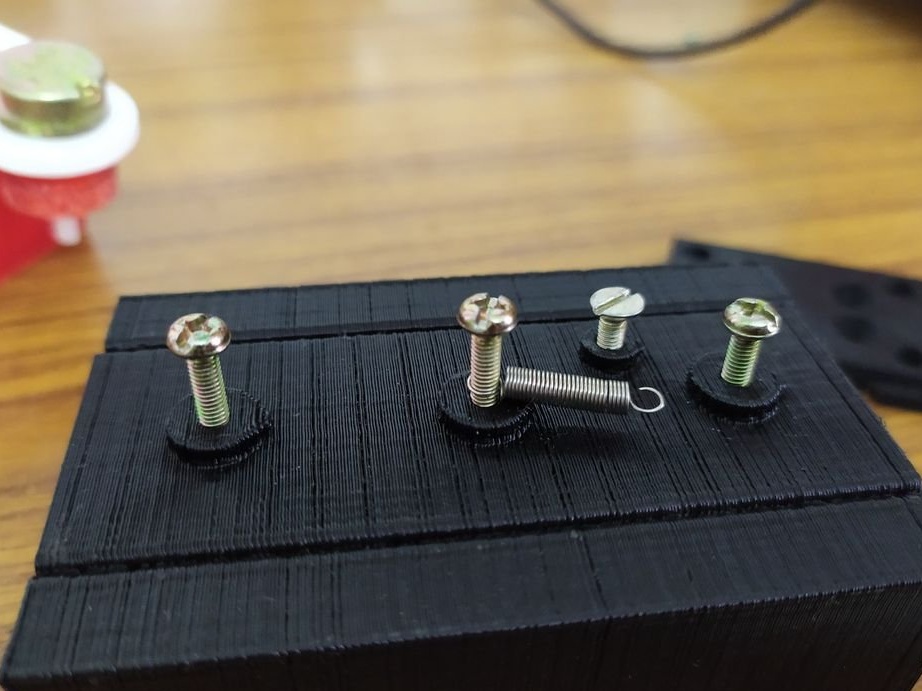
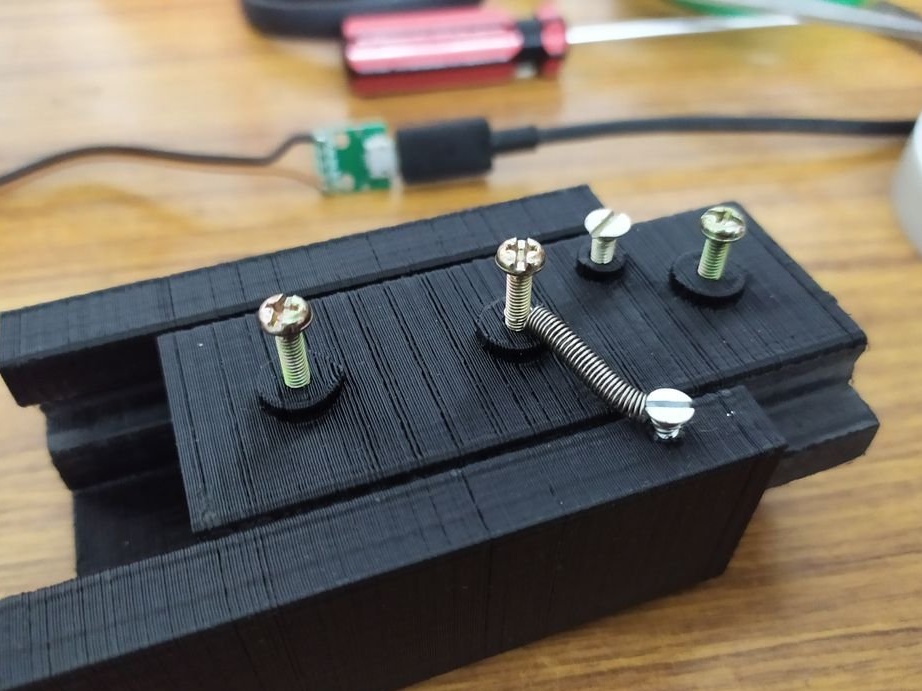
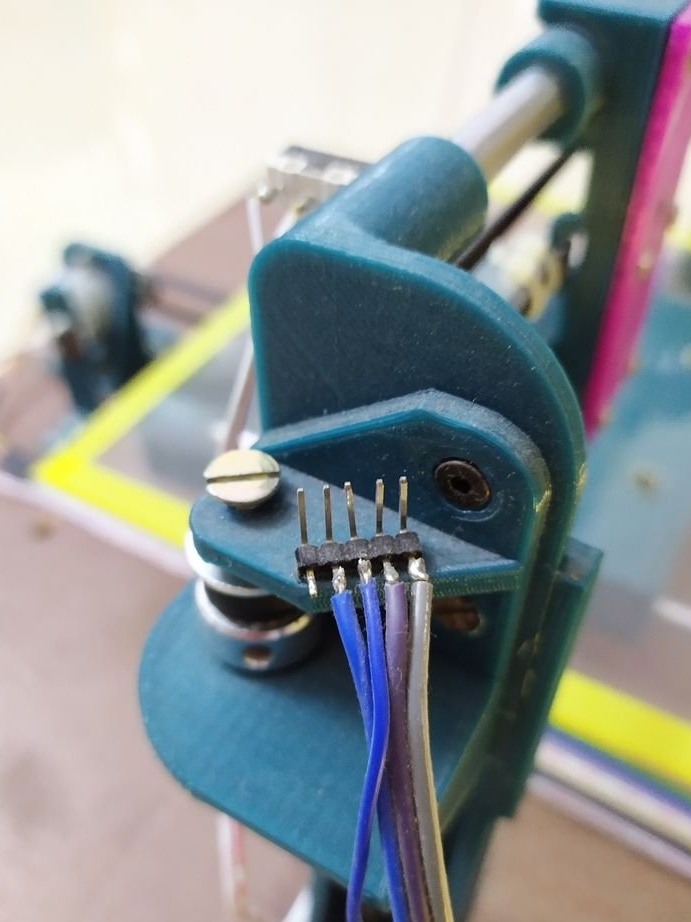
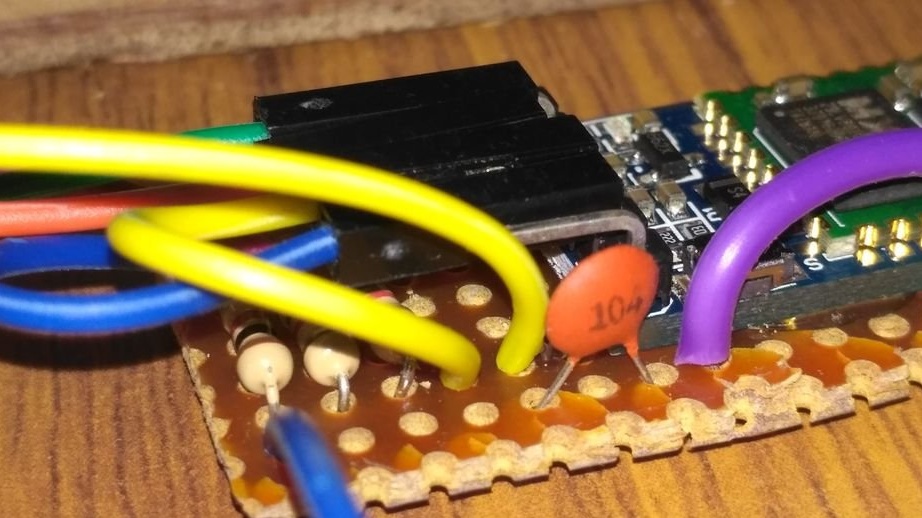
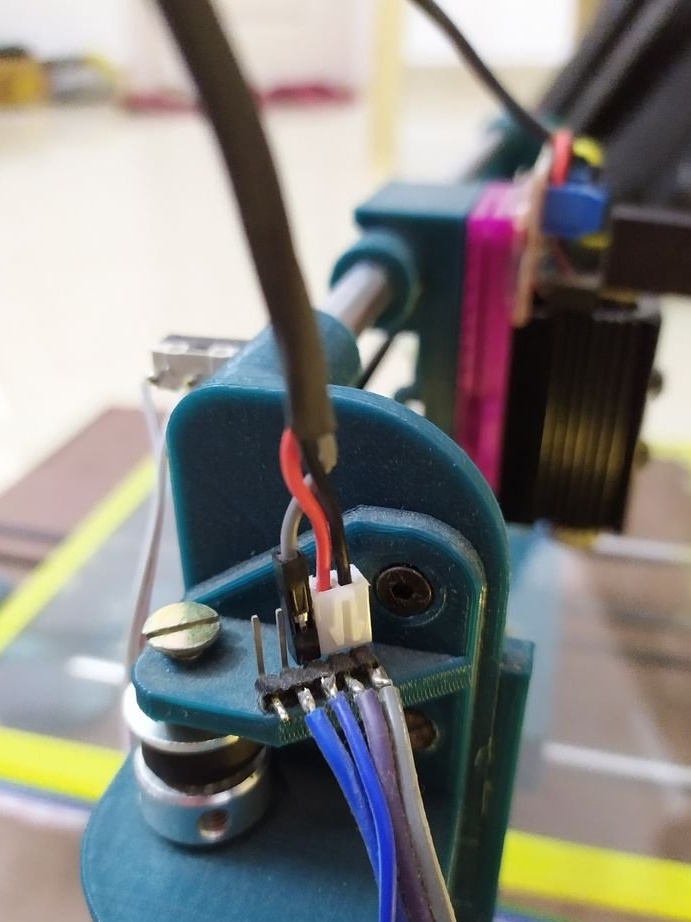
Servomotor, terminály a Arduino se drží, jak je vidět na fotografii.
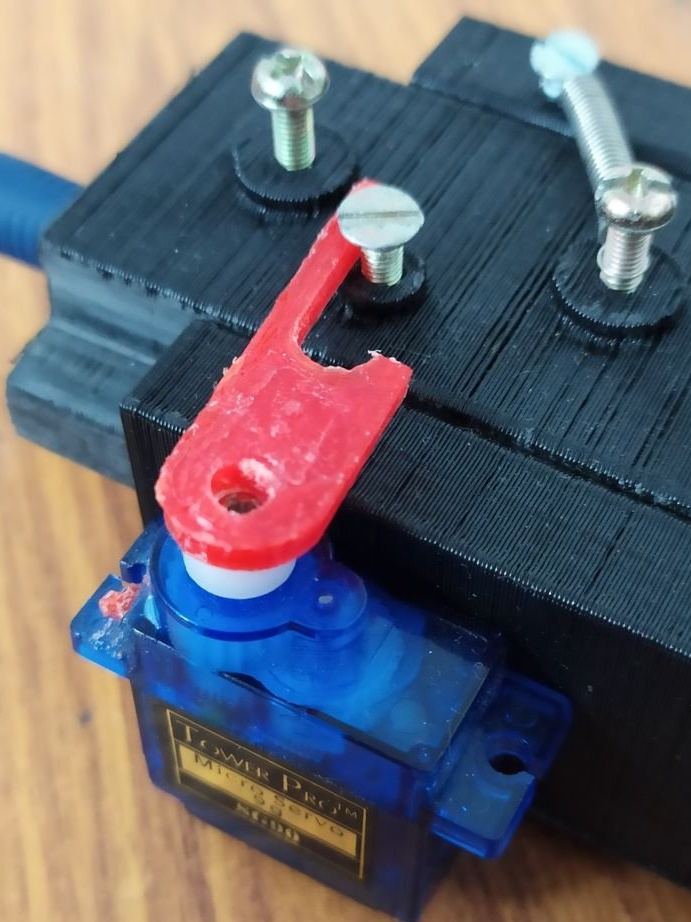
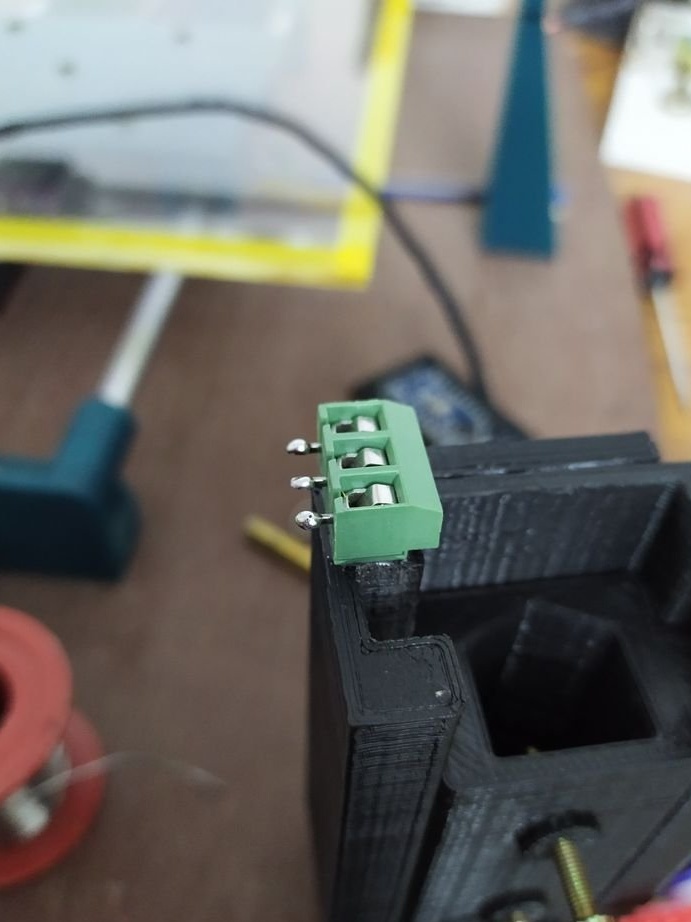
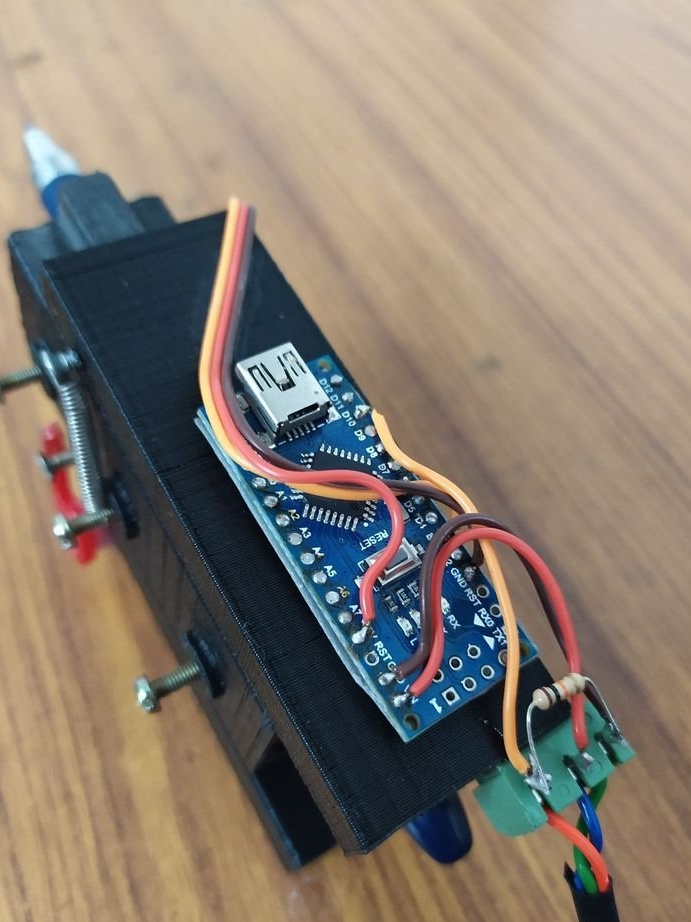
Tady Arduino nano se používá k převodu laserových řídicích signálů na PWM signály, které mohou řídit mikromotor.
Je spojen takto:
+5 Volt - Vin
-5 V - GND
Signál - D10
Servo power + ve - 5V
Servo power -ve - GND
Servo signál - D3
Poté se načte kód.
#include Servo myservo;
neplatné nastavení ()
{
myservo.attach (3);
pinMode [10, INPUT];
}
prázdná smyčka ()
{
if (digitalRead (10) == VYSOKÉ)
{
myservo.write (20);
}
jinde
{
myservo.write (60);
}
}
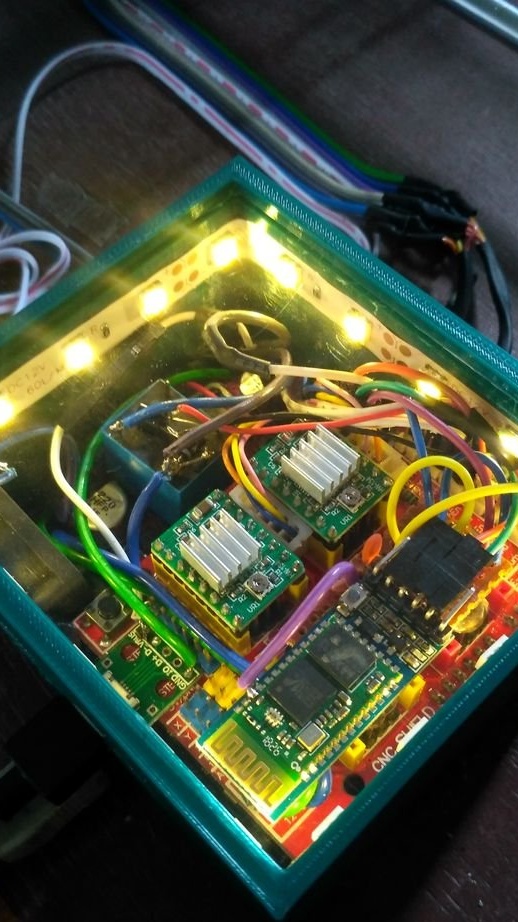
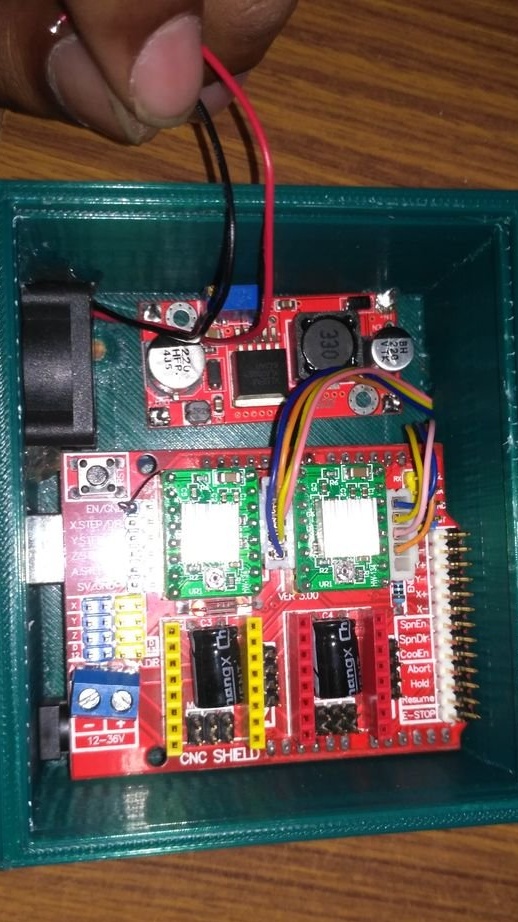
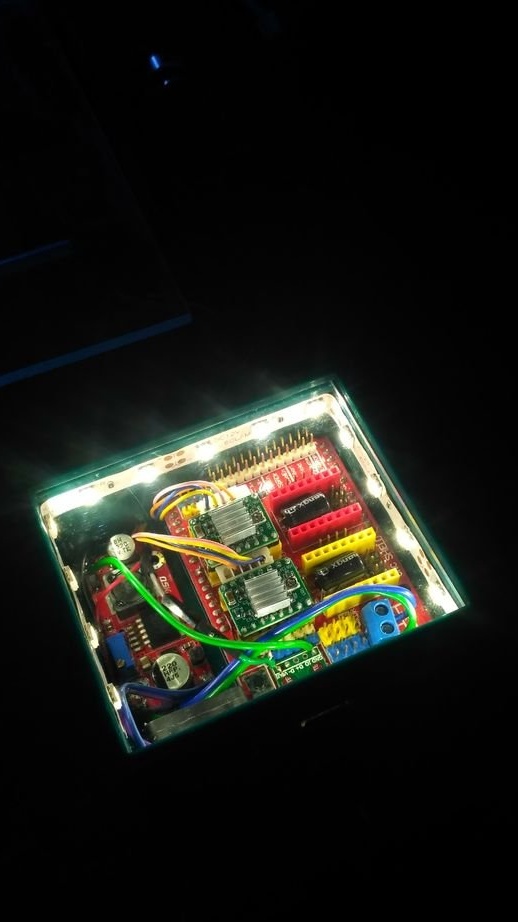
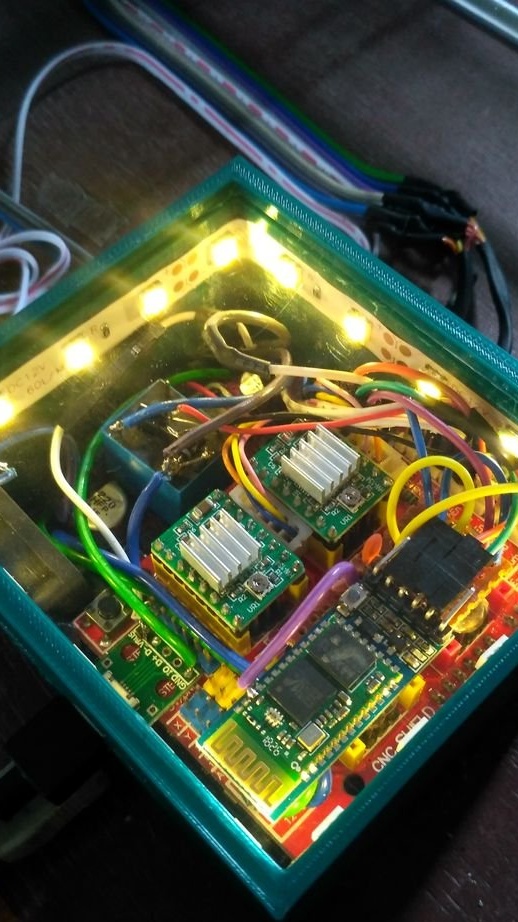
Krok dvanáctý: Instalace
Instalace podle schématu.
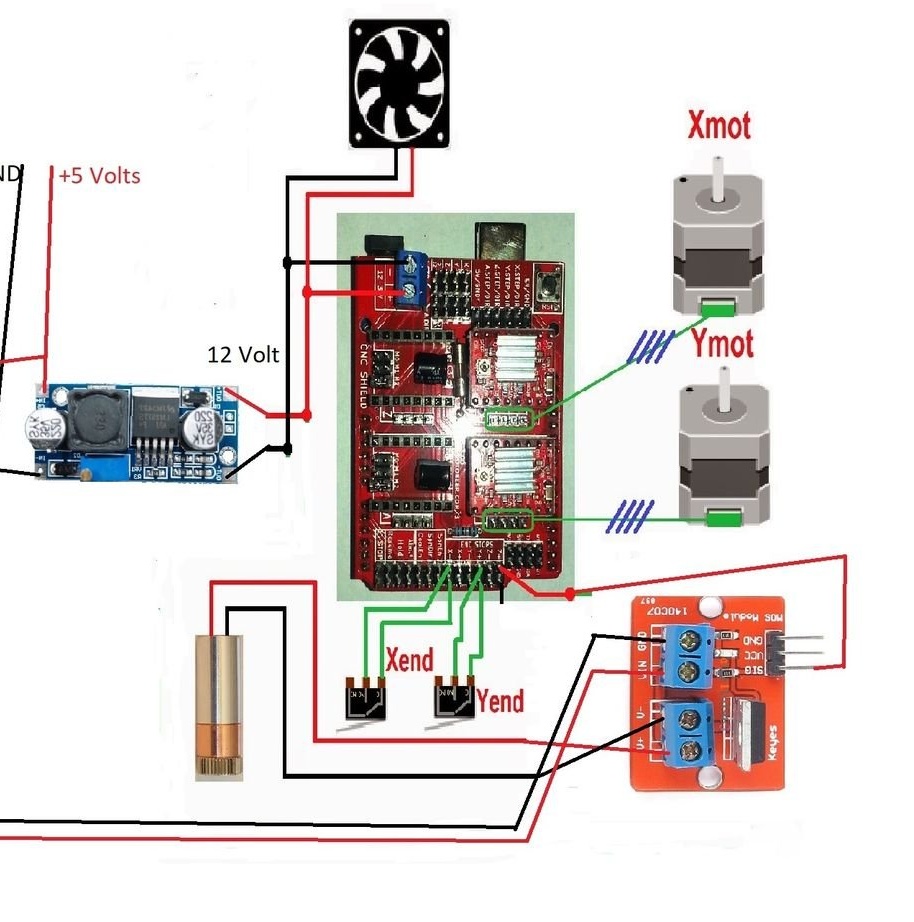
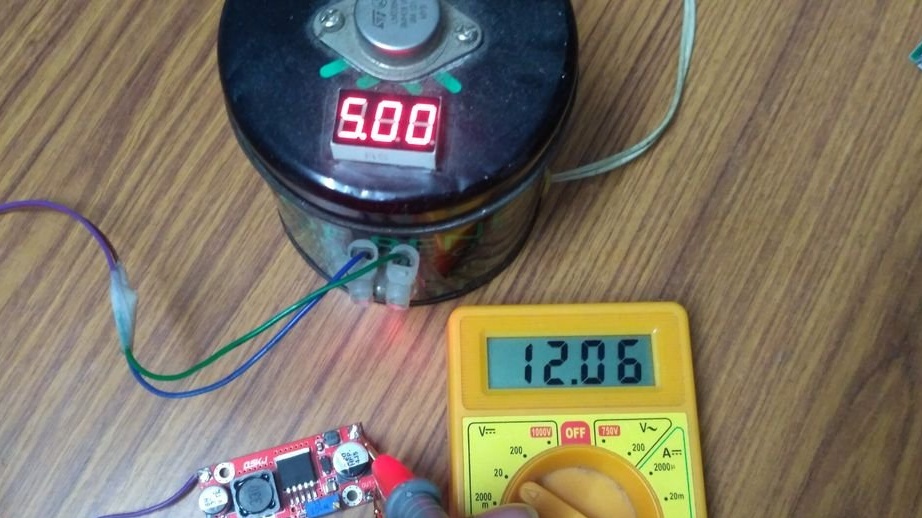
Zesilovací převodník je nastaven na 12V.
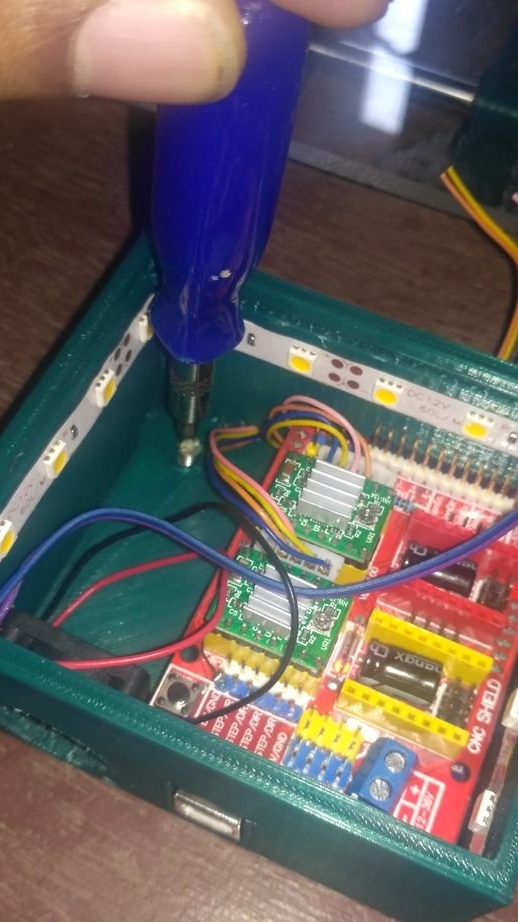
Arduino je nainstalován v rozšiřujícím modulu CNC.
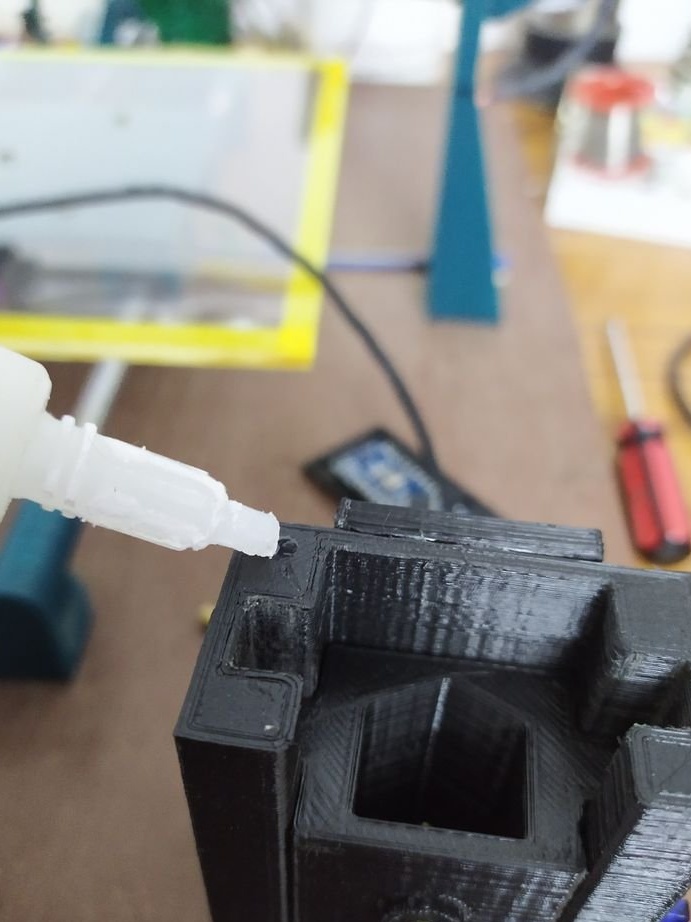
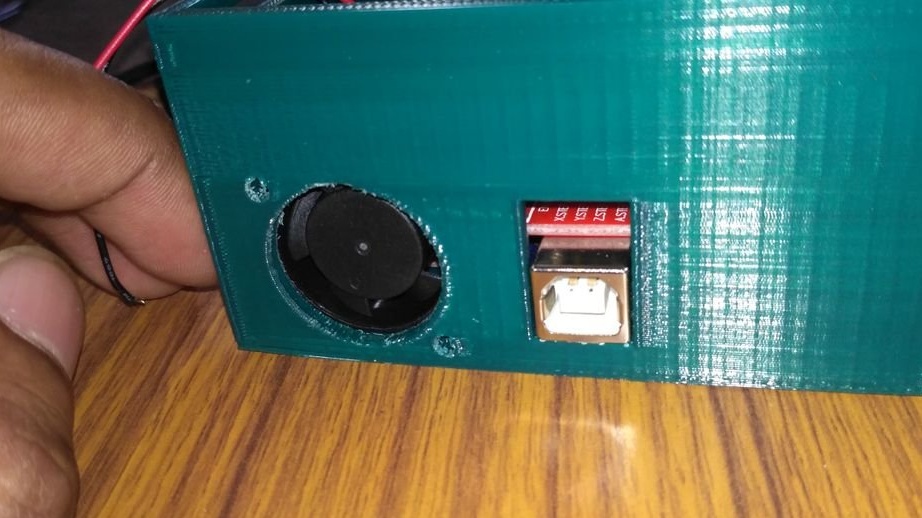
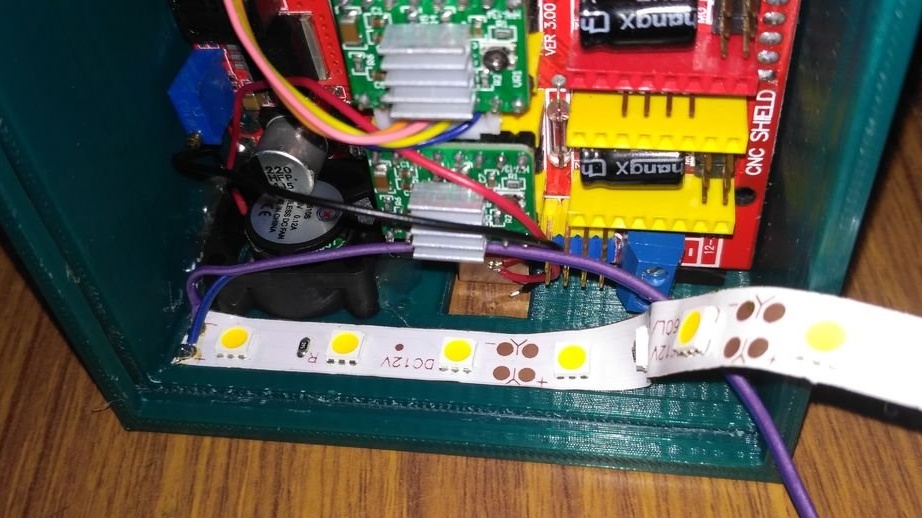
Ventilátor je přilepen k otvoru, který je k tomu opatřen, pomocí tavného lepidla.
Byl přidán LED pásek pro zobrazení vzhledu i napájení.
Potištěné pouzdro je přišroubováno k překližce.
Jako kryt těla se používá průhledný akrylový list o tloušťce 87 x 75 mm 2 mm. Může být vložen skrz drážku, která je pro něj na jedné straně pouzdra.
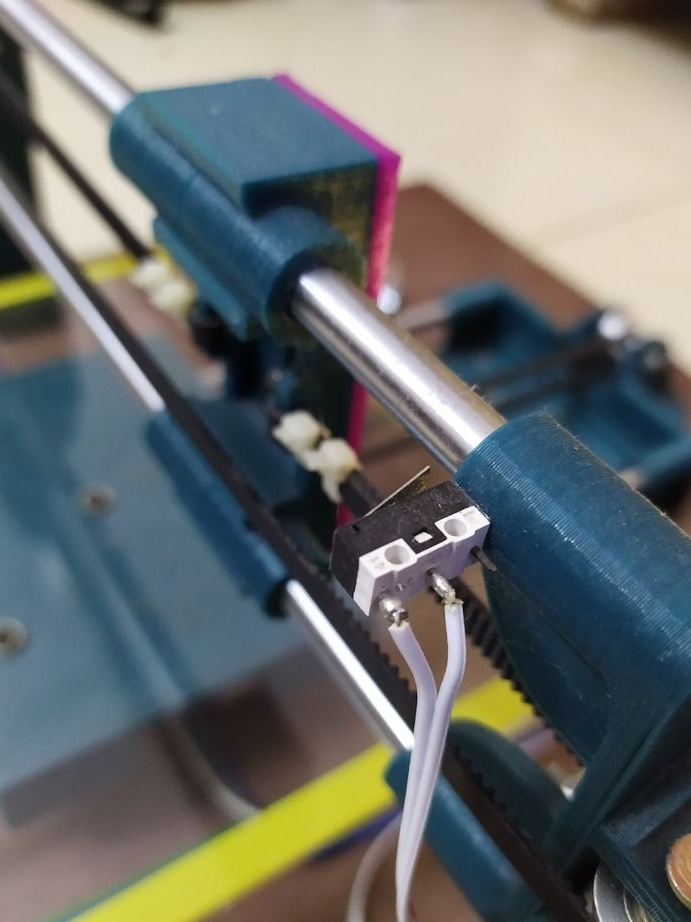
Koncové spínače jsou připevněny tak, že tlačítko je stlačeno 3 mm před tím, než se ložiska každého vozíku srazí s držáky trakce.
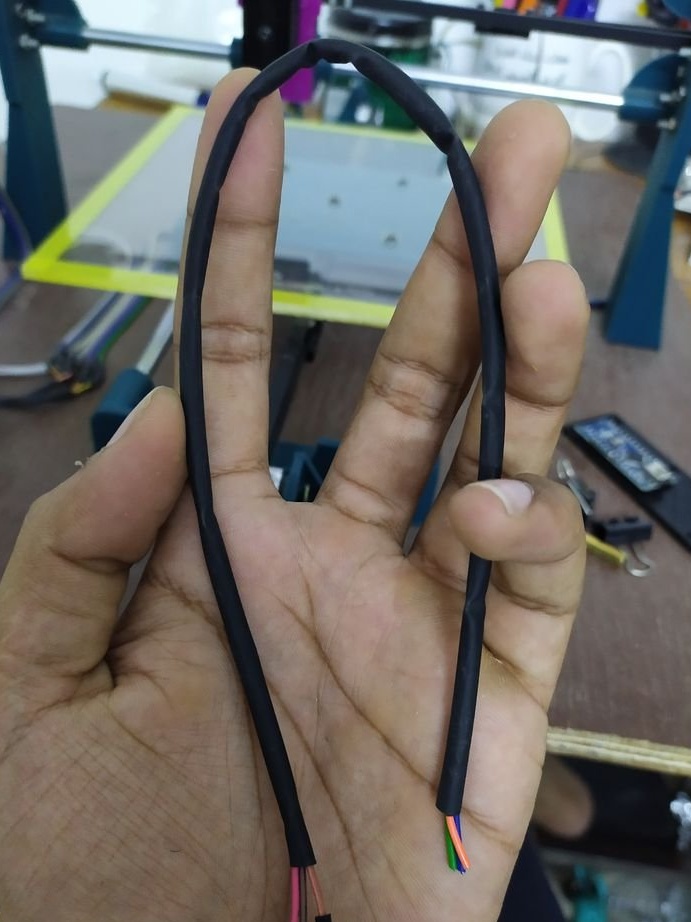
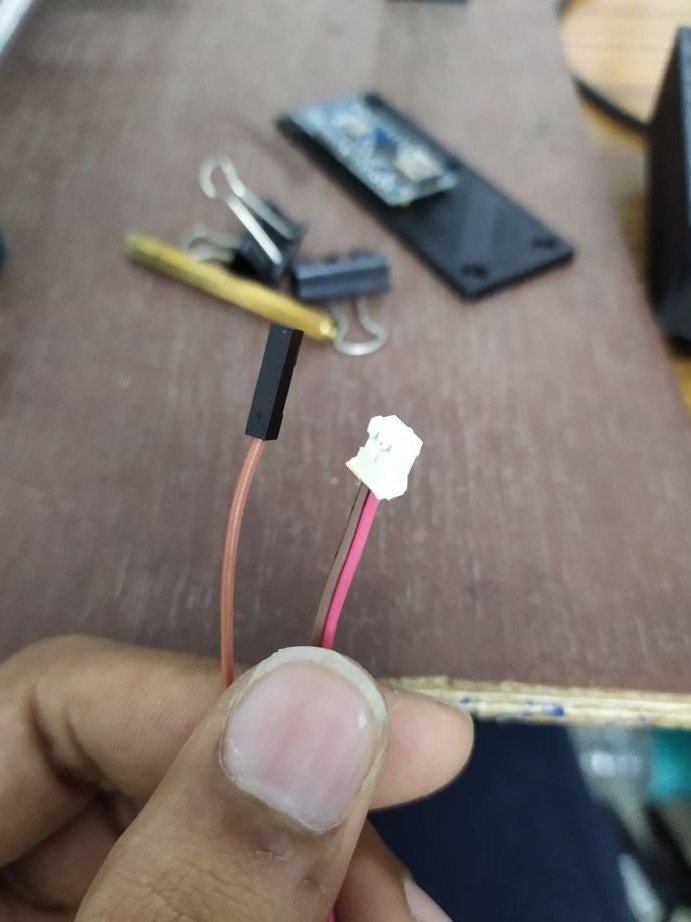
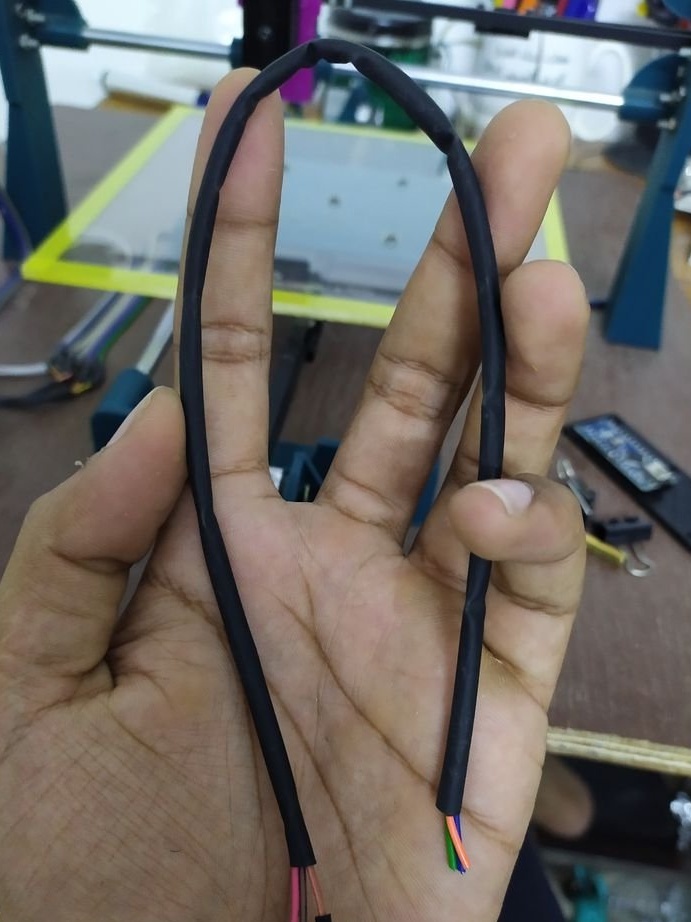
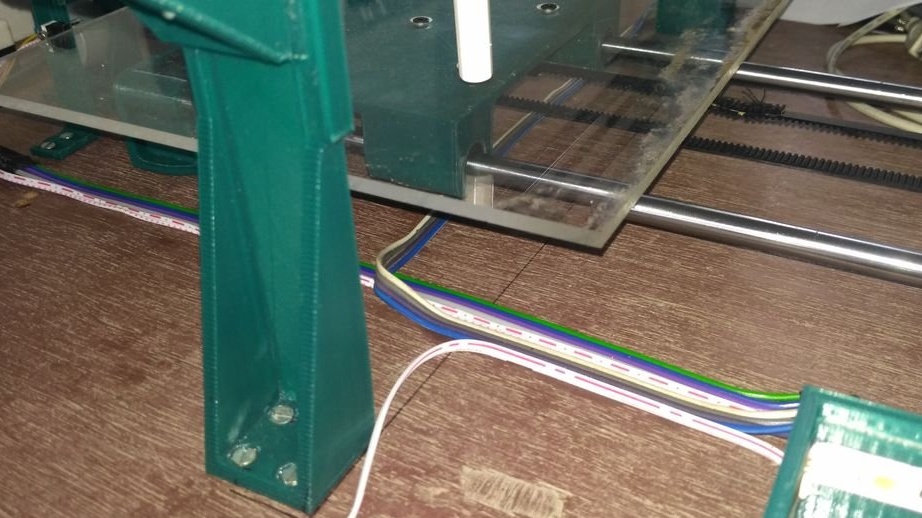
Vodiče pro motory a koncové spínače jsou protáhlé a spojení jsou izolovaná.

Dráty jsou přilepeny k překližkové základně lepidlem.
Zde se posilující převodník používá pouze k napájení čipů ovladače motoru A4988. Každý motor spotřebovává pouze 150 mA proudu.
Krok třináct: Bluetooth modul
Připojuje modul Bluetooth.
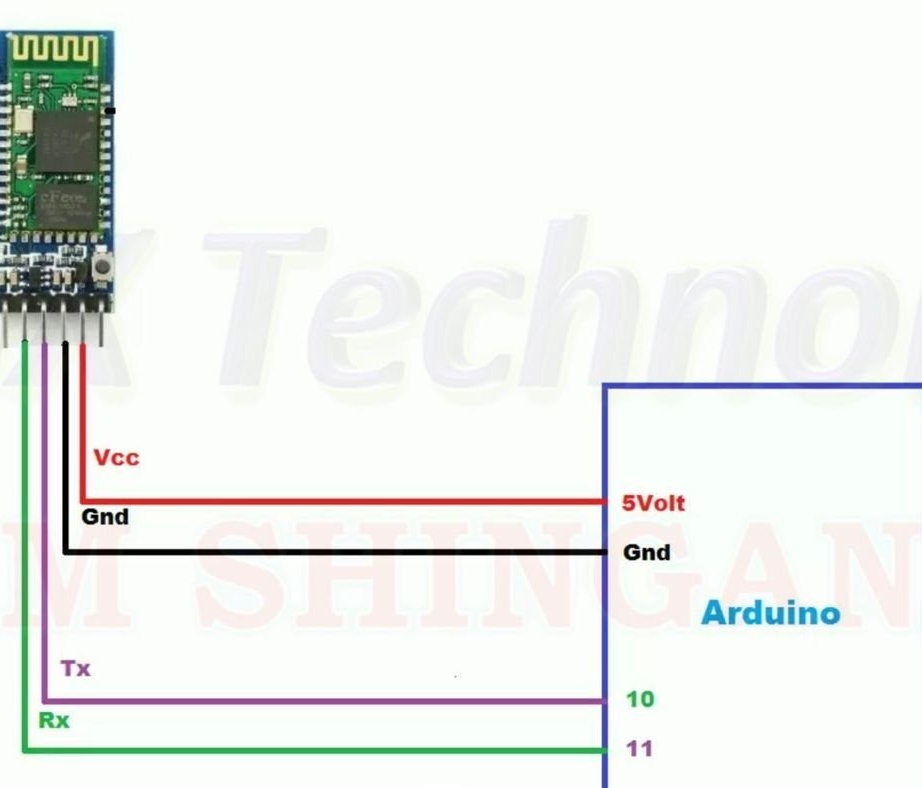
Chcete-li odesílat a přijímat data nebo v tomto případě G-kódy prostřednictvím modulu HC05 Bluetooth, musíte nejprve modul nakonfigurovat.
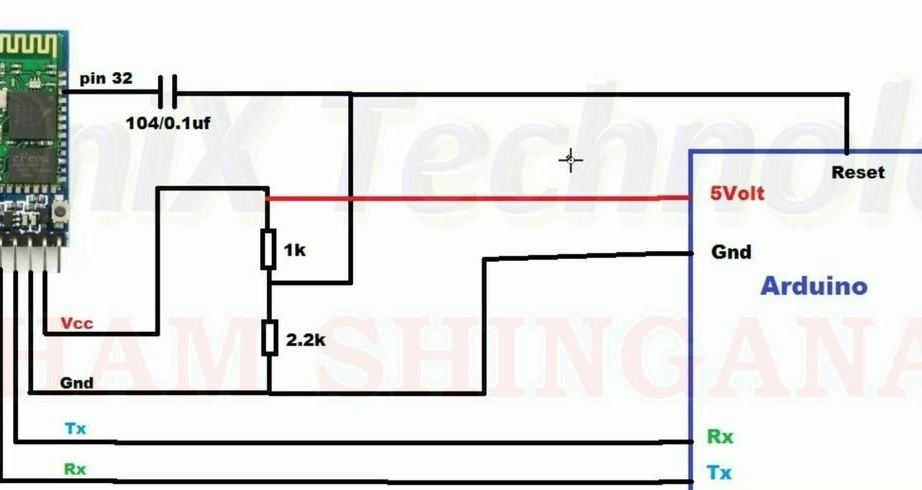
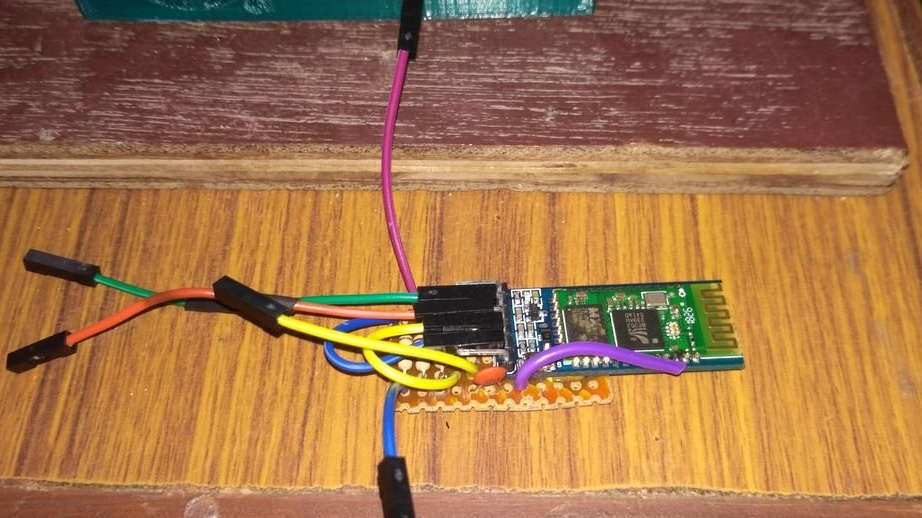
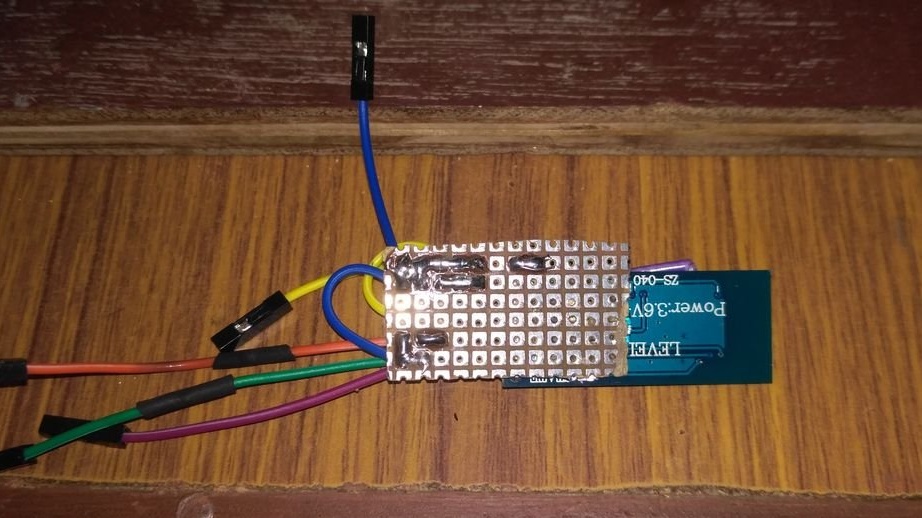
Připojte modul HC05 k Arduino Uno, jak je znázorněno na prvním obrázku.
Stáhněte si kód připojený k tomuto kroku do Arduina.
BLUE_P.ino
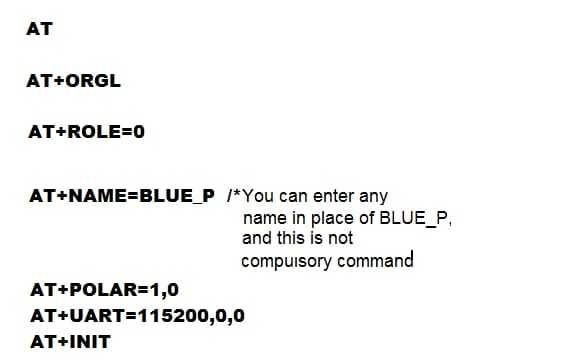
Nyní zadejte kódy zobrazené na druhé fotografii.
Po dokončení nastavení odpojte modul HC05 od Arduino, který jste použili pro programování, a připojte se k Arduino CNC Shield podle schématu zapojení na 3. fotografii.


Krok čtrnáctý: kód a nastavení
V případě laserového rytce stáhne hlavní kód kód.
GRBL.zip
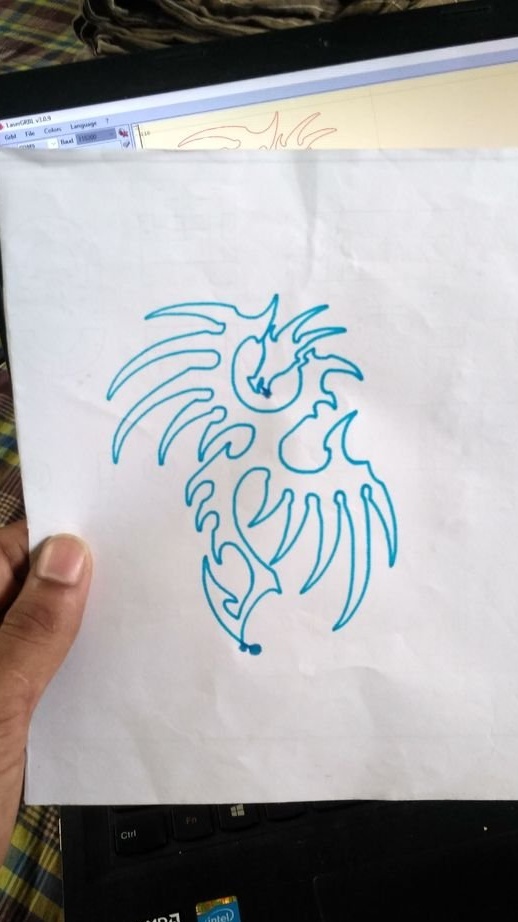
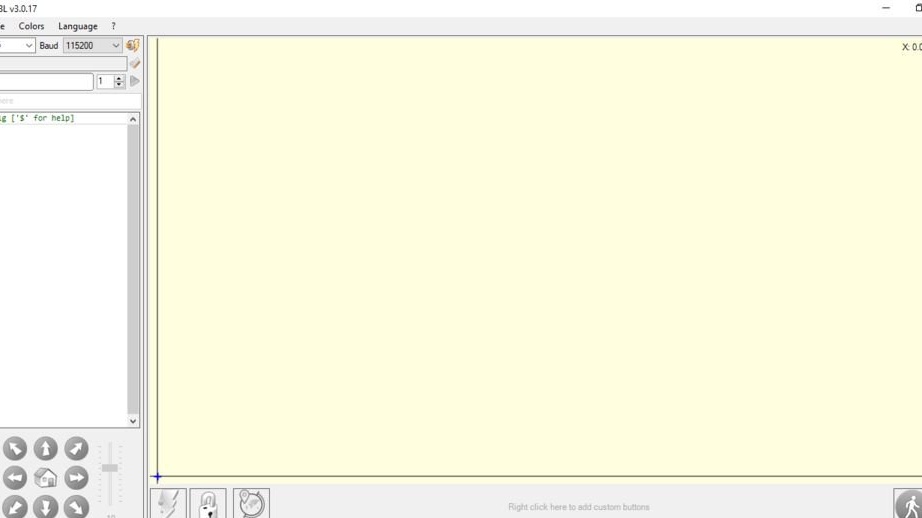
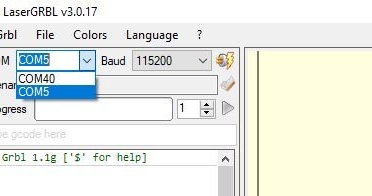
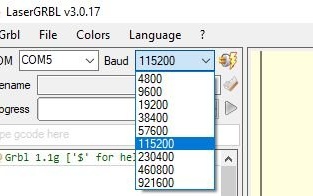
Laser GRBL je jedním z nejlepších bezplatných G-kódových streamů pro laserové rytce. Může přímo přenášet G-kódy do Arduina přes port som. Má vestavěný nástroj pro převod obrázků do G-kódů.
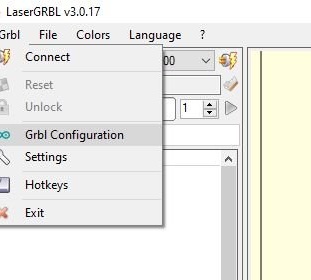
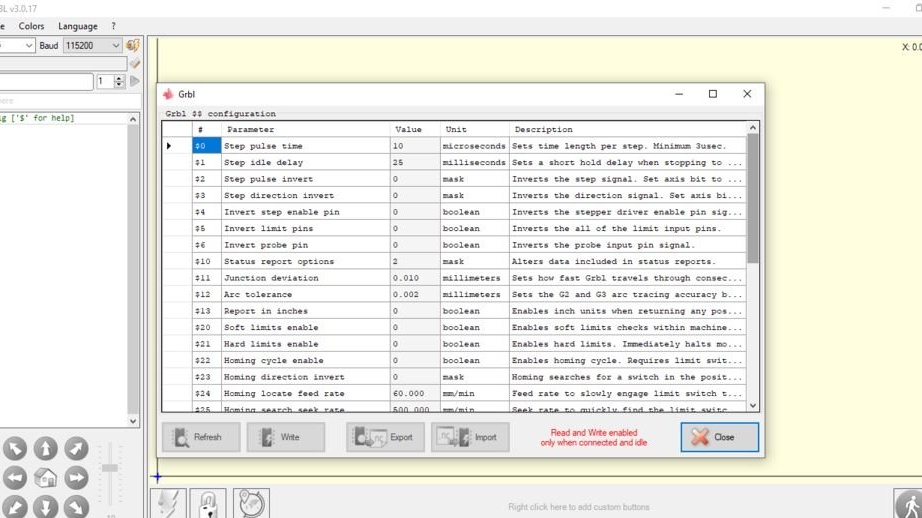
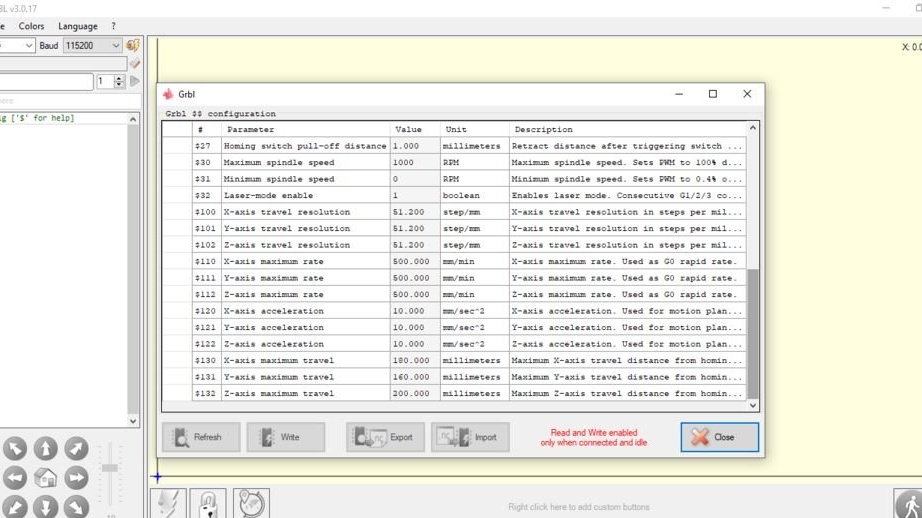
Všechna nastavení musí být provedena stejně jako na fotografii, přičemž je třeba vzít v úvahu následující:
Nainstalujte port sumce, ke kterému je připojen váš laserový rytec.
Hodnoty konfigurace lze změnit tak, aby co nejlépe odpovídaly vašemu rytci.
Krok patnáct: Testování
Po připojení laseru je čas zkontrolovat jeho přesnost.
Je třeba zkontrolovat několik věcí:
Pohybují se osy X a Y správným směrem?
Funguje navádění správně?
Vynechává motor kroky kvůli vysokému tření nebo příliš těsným řemenům.
Jsou velikosti tištěných obrázků shodné s velikostmi uvedenými v softwaru. Odpovídá počet kroků na mm použitému krokovému motoru.
Napnutí řemenu lze nastavit pomocí napínače. Otáčejte šroubem, dokud nedosáhnete správného napětí.
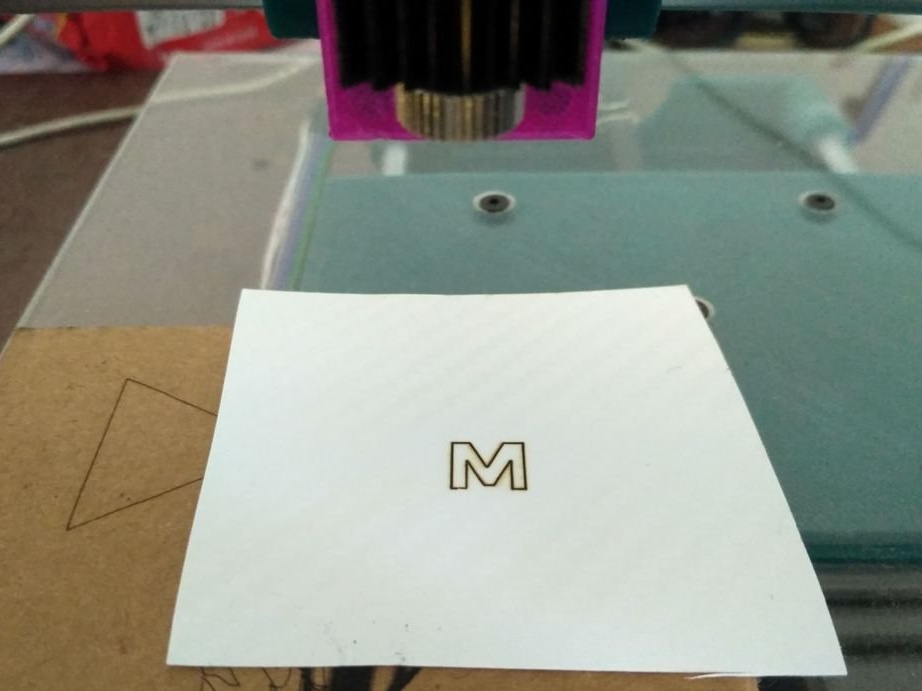
Chcete-li zkontrolovat, zda má motor kroky a správné rozměry, vydejte jednoduchý souvislý geometrický útvar, například čtverec, trojúhelník nebo kružnici. Pokud laser začíná od jednoho bodu a ideálně se zastaví ve stejném bodě, znamená to, že váš laser nevynechal jediný krok a funguje perfektně. Po vytištění trojúhelníku nebo čtverce ručně změřte jeho velikost pomocí pravítka a zkontrolujte, zda odpovídá zadaným rozměrům.

Podle mistra je se strojem zcela spokojen.
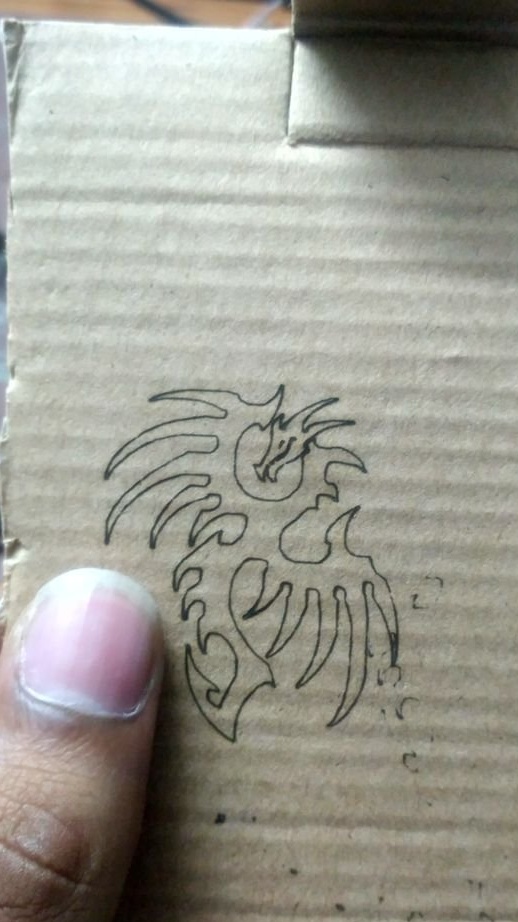
Ryté na různé materiály, jako je dřevo, karton, kůže, plast atd.
Protože motor měl asi 102 kroků na mm, lze vyrobit drobné rytiny s jemnými detaily.
Rytíř pracoval bez problémů na napájení USB.