

A nyní se odvrací od slunce. Funguje to velmi jednoduše: na pevné desce jsou tři fotorezistory, jeden přední a dva boční. Pokud jsou boční fotorezistory rozsvíceny, ale přední strana není, zařízení otočí rozložení slunečnice dopředu. S jakoukoli nevyvážeností - otočí se správným směrem. Tento design, kombinující elektronika a humor, vynalezli Instructables pod přezdívkou shivtej1505.
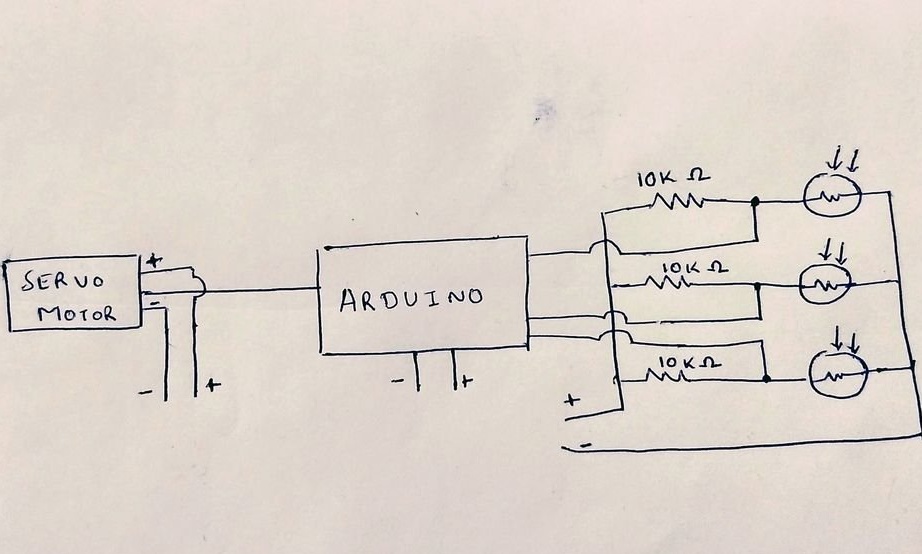
Fotorezistory jsou vytaženy odpory 10 kilo-ohmů. Čím je tedy fotorezistor jasnější, tím menší je kladné napětí vzhledem k běžnému drátu. Nevhodné, ale software v Arduino převádí všechny tři analogové signály o nic horší než operační zesilovače, které nejsou potřeba. Stejný software generuje signál pro ovládání servomotoru pomocí standardní knihovny servo.h.
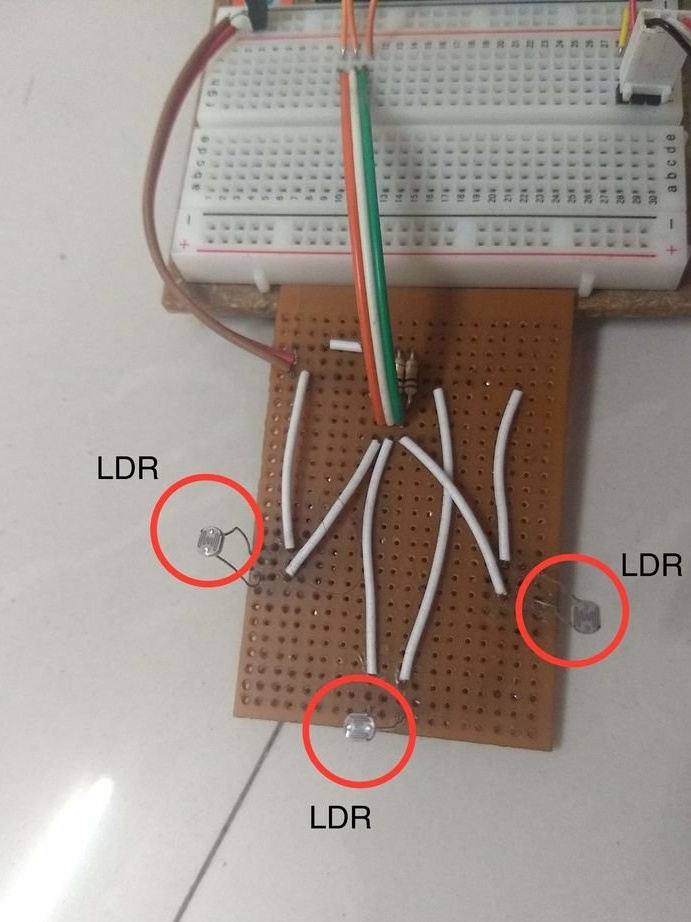
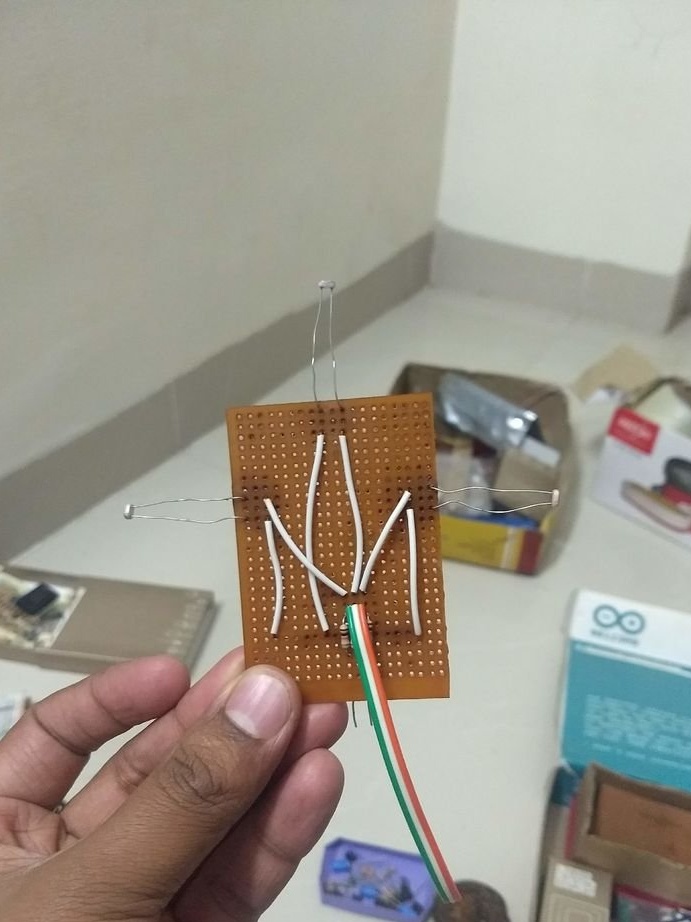
Na dvou prkéncích, jednom typu perfboard, druhém typu prkénko, ale zatím bez Arduina to vypadá takto:
Závěry desky, ke které jsou připojeny fotorezistory a servomotor, jsou stanoveny skica. Pokud v něm nic nezměníte, signály z fotorezistorů budou muset být přiváděny na analogové vstupy: zleva do A0, ze středu do A1, zprava na A2 a odstranit signál pro servomotor z výstupu 13.
Master pájí fotorezistory na palubní desku typu perfboard:
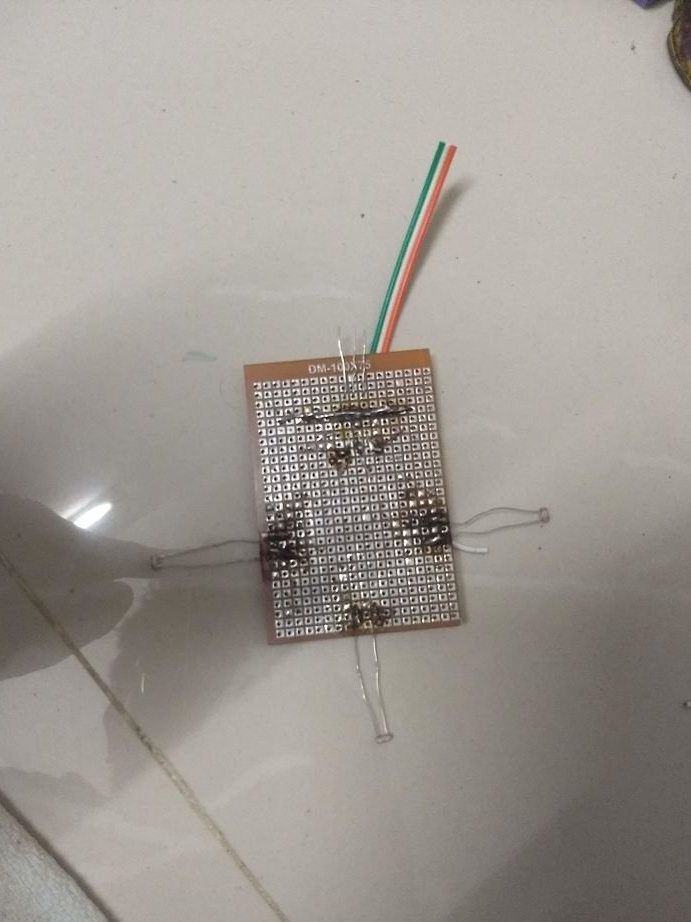
Spojuje je s pájecí propojkou:
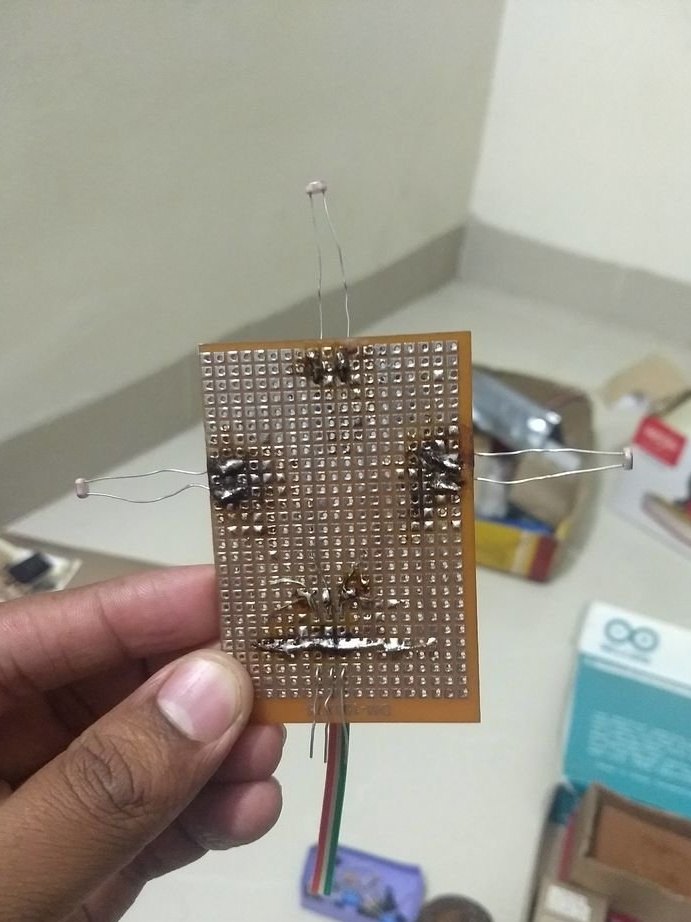
A dráty:
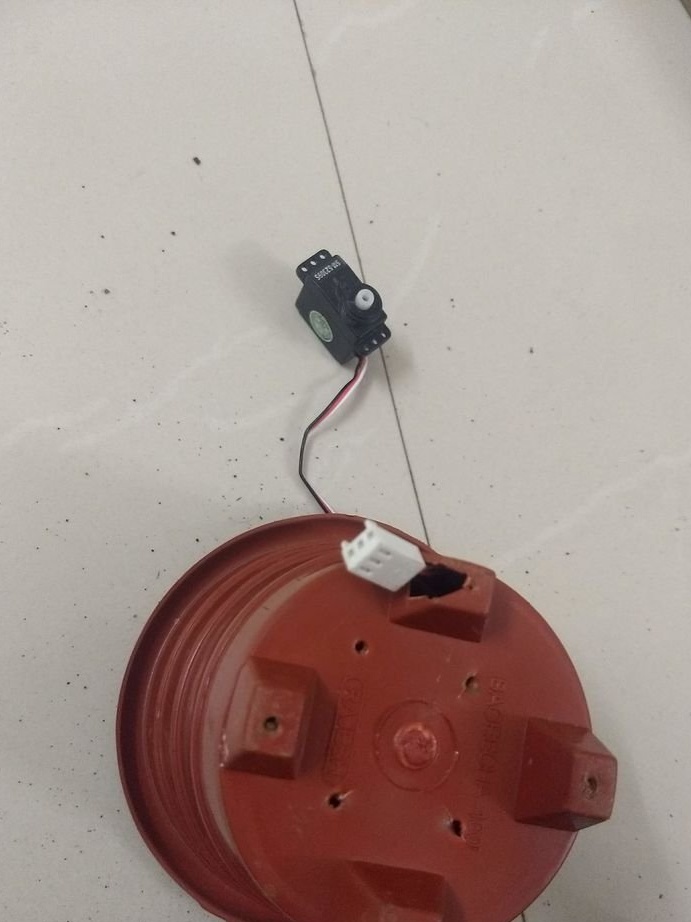
Prodlužuje otvor v hrnci pro výstup vodičů servomotoru pomocí konektoru:

Výstup tohoto konektoru:
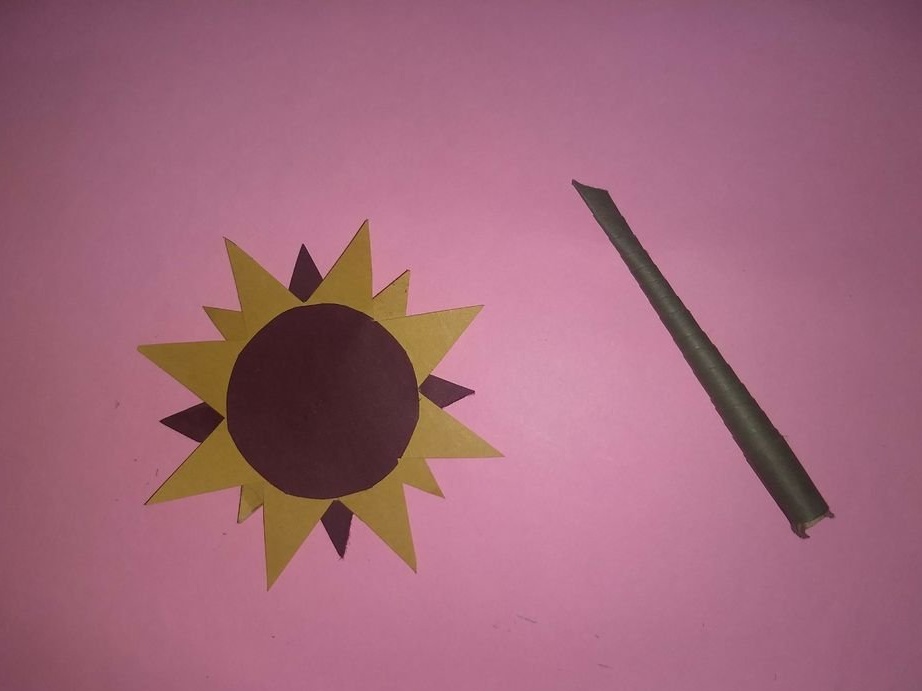
Provede rozložení slunečnice:

Deska typu perfboard se připojuje k prkénku typu prkénko a prostřednictvím ní k Arduinu, který bliká (odkaz na náčrtek výše). Do hrnce se nalije suchá země, do které se vloží servomotor s maketou slunečnice na hřídeli. Hlavní věc je, že jste náhodou nebrali slunečnice za skutečné a zalévali ji. Obecně se nesnažte o přílišnou realitu. Robotické slunečnice mohou také způsobit účinek „zlověstného údolí“. Nyní se podívejme, jak to funguje:
Ve srovnání s podobným zařízením od Himawari od japonského autora Akiry Nakaushi je navrhovaný design velmi zjednodušený. Nemá řadu LED, několik kamer, výpočetní výkon je výrazně snížen.