

Dobrý den milenci Arduino! Na internetu jsem viděl docela zajímavého a velkolepého robota (nebo zařízení, říkejte tomu, co chcete), který „hraje“ hru Stak, pomocí stejných operačních principů můžete vyrobit robota, který dokáže hrát hry, jako je geometrická pomlčka, klavír a další, kde jen potřebujete Skočte na obrazovku s určitou sekvencí. Co jsem udělal, zhodnoťte v níže uvedeném průzkumu.
Pokud má někdo zájem, je zde video o práci tohoto robota:
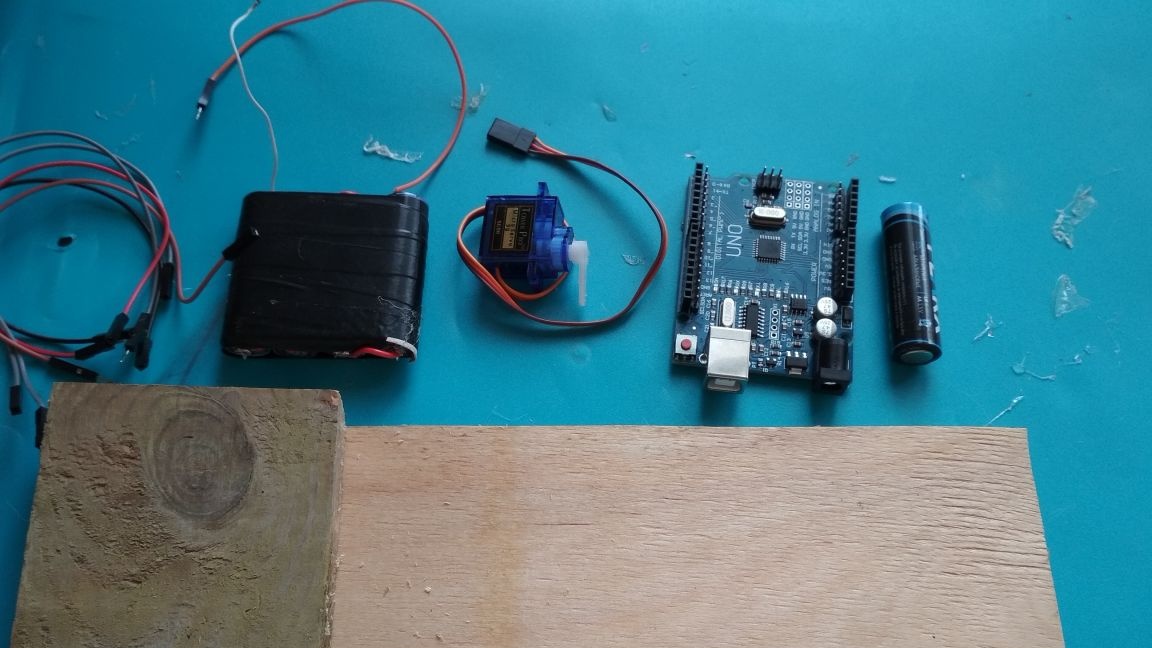
A proto pro tento „robot“ potřebujeme:
platba Arduino Uno
- spojovací vodiče jako „otec-matka“ nebo „otec-otec“
-služba
- kousek překližky
- kus desky o tloušťce asi 1 cm, hlavní věc je, že dvakrát je silnější než překližka
zmrzlina hůl
stylus
Fólie (pokud není stylus)
-battery (pokud není stylus)
- napájení 6-12 voltů (používám 4 prstové baterie zapojené do série)
Z nástrojů, které potřebujeme:
nůžky
tepelné lepidlo
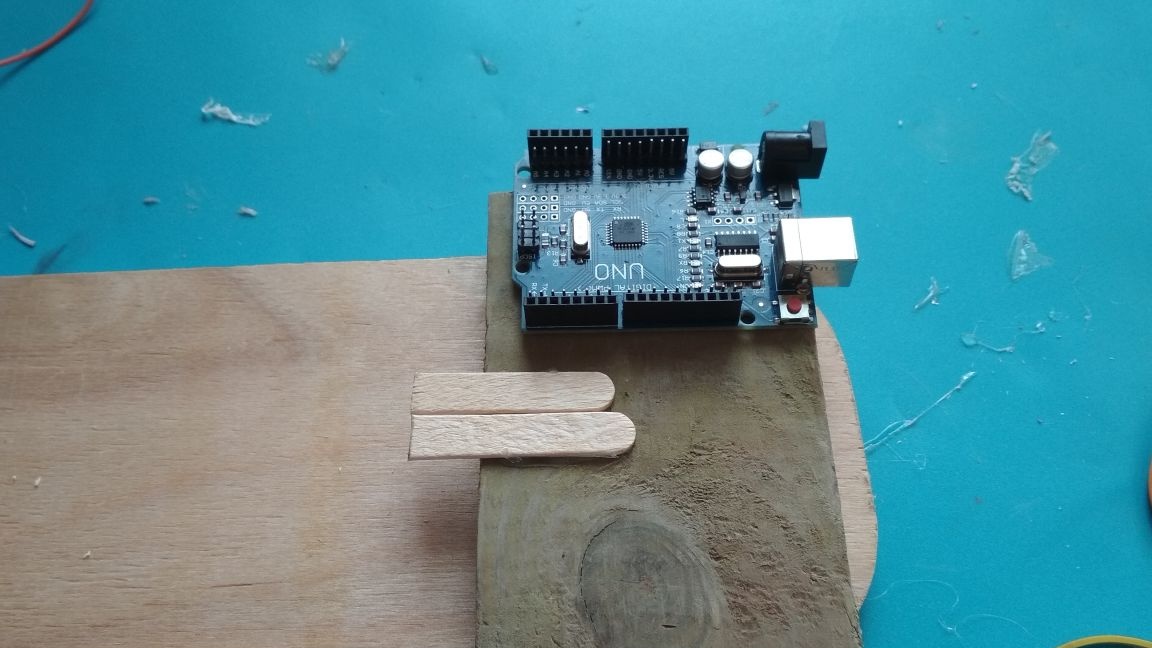
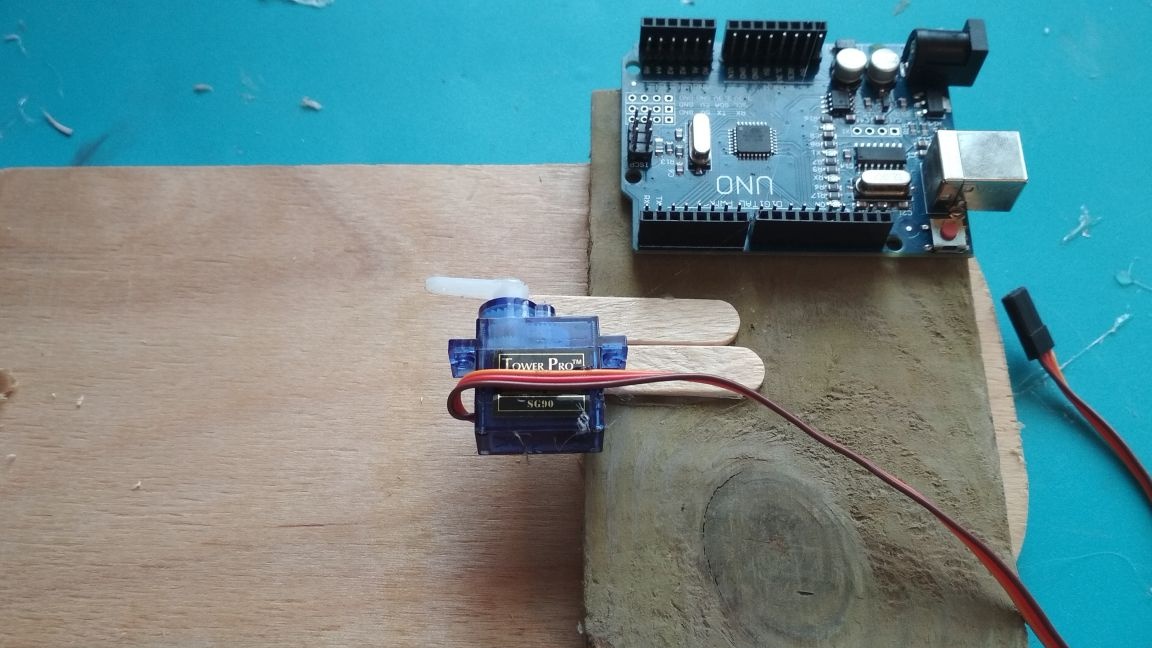
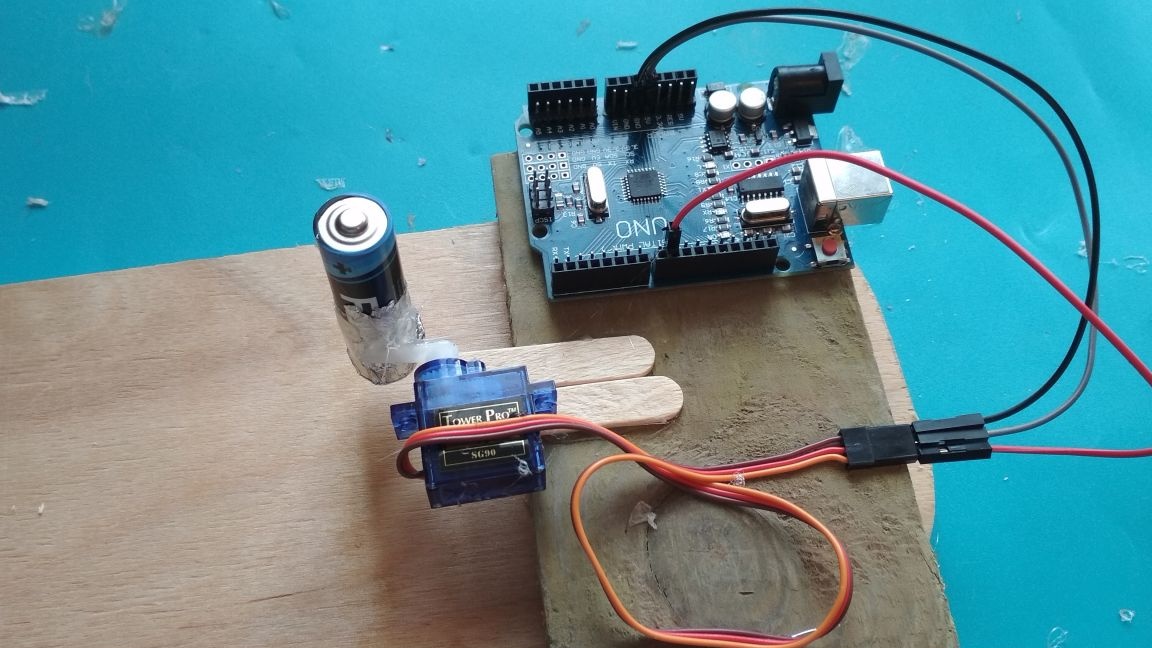
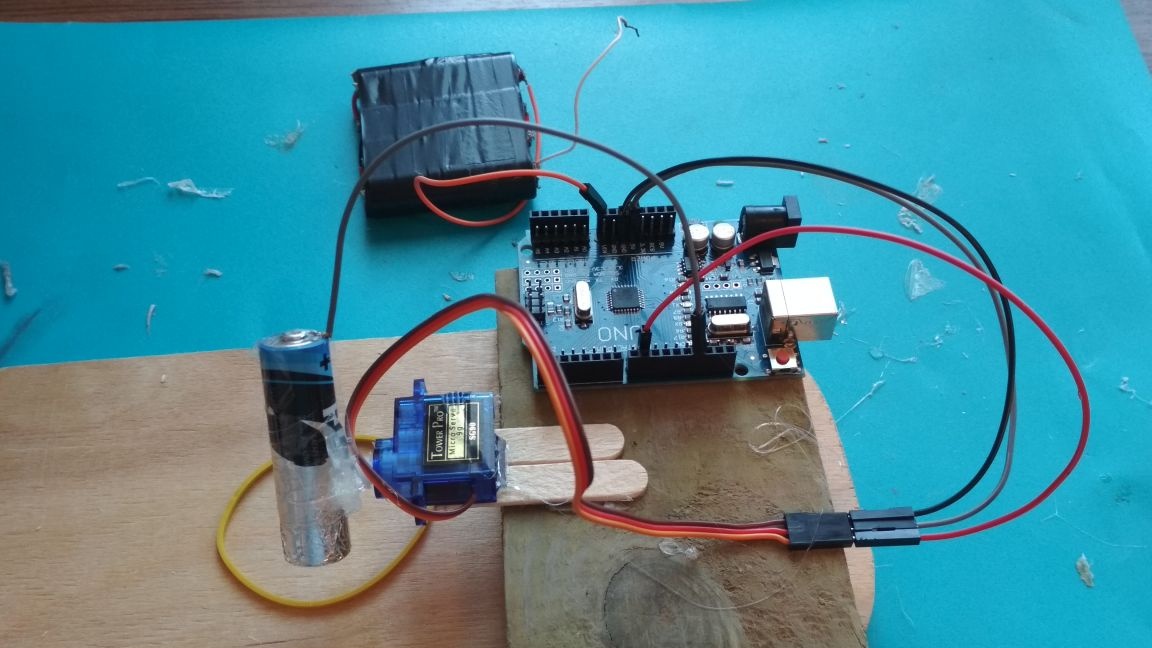
A tak první věcí, kterou musíte udělat, je vyříznout kus dvakrát tak velký, jako je váš telefon, z kusu překližky, můžete ho zvětšit a musíte vyříznout kus velikosti telefonu z desky (udělal jsem mírně odlišné velikosti, ale to není vůbec důležité). Potom přilepíme naše polotovary, jak je vidět na fotografii:

Vezměte tyčinku zmrzliny a nakrájejte ji na polovinu:

Nalepte je do středu desky, ze strany překližky, jak je vidět na fotografii:

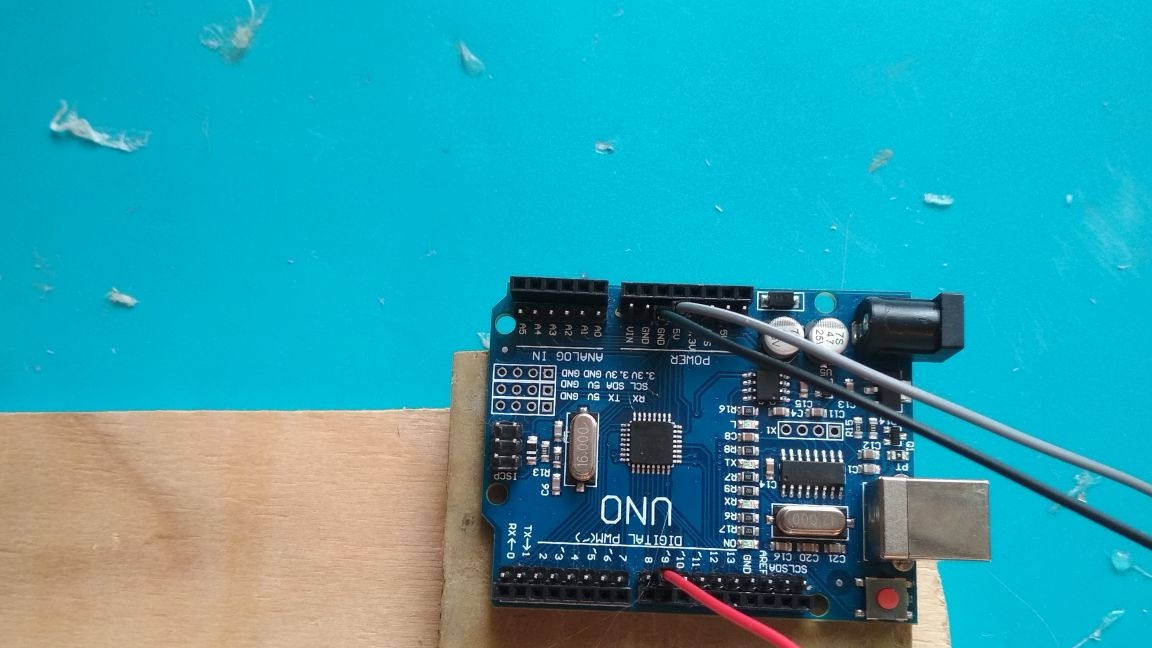
Lepíme desku Ardino Uno z okraje desky:
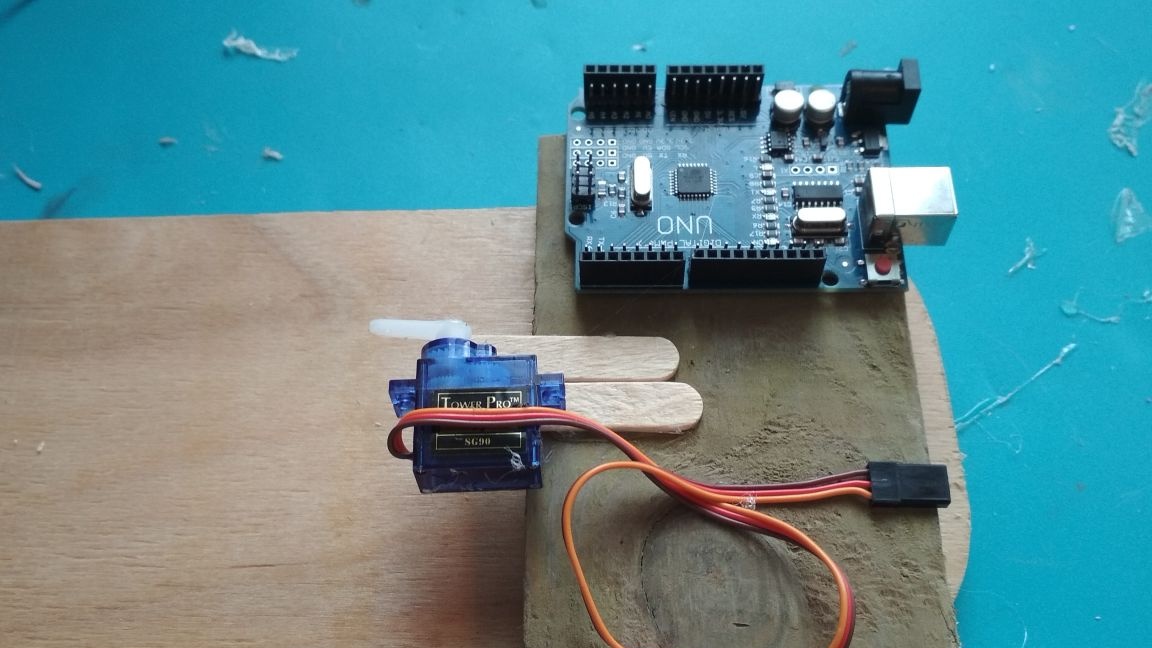
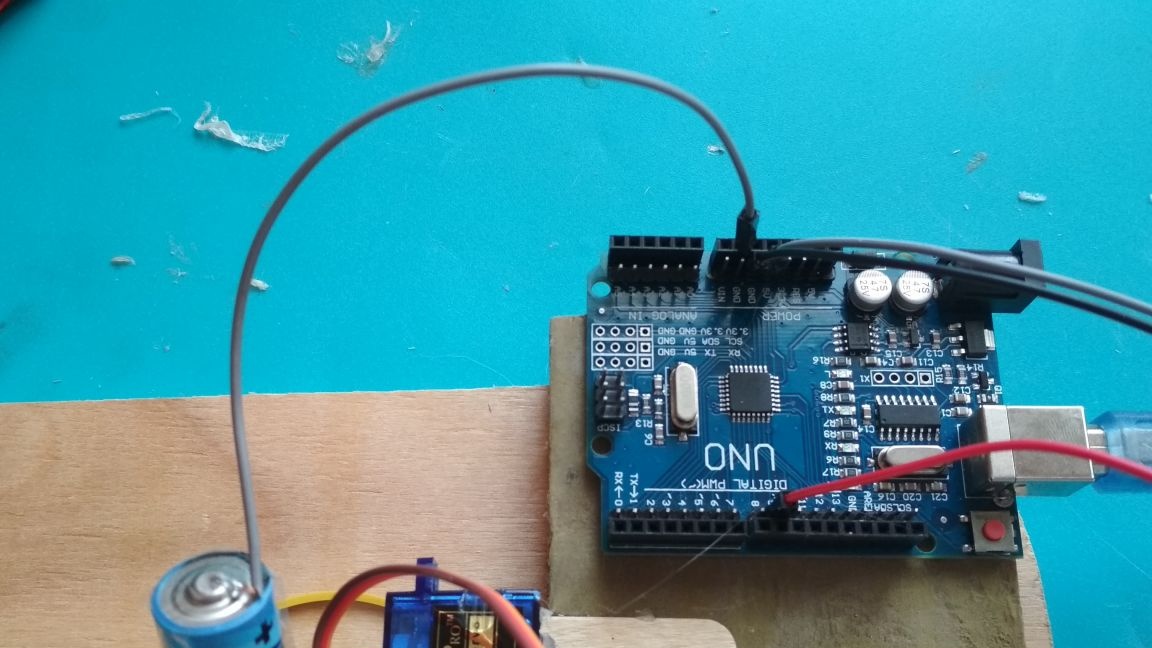
Bereme servomotor a lepíme dráty, aby nezasahovaly:
Servomotor nalepte na konec polovin tyčinek zmrzliny:
Položíme vodiče a přilepíme výstup servomotoru na okraj desky:
Přidejte 3 drátové maminky, nejlépe v různých barvách, aby nedošlo k záměně
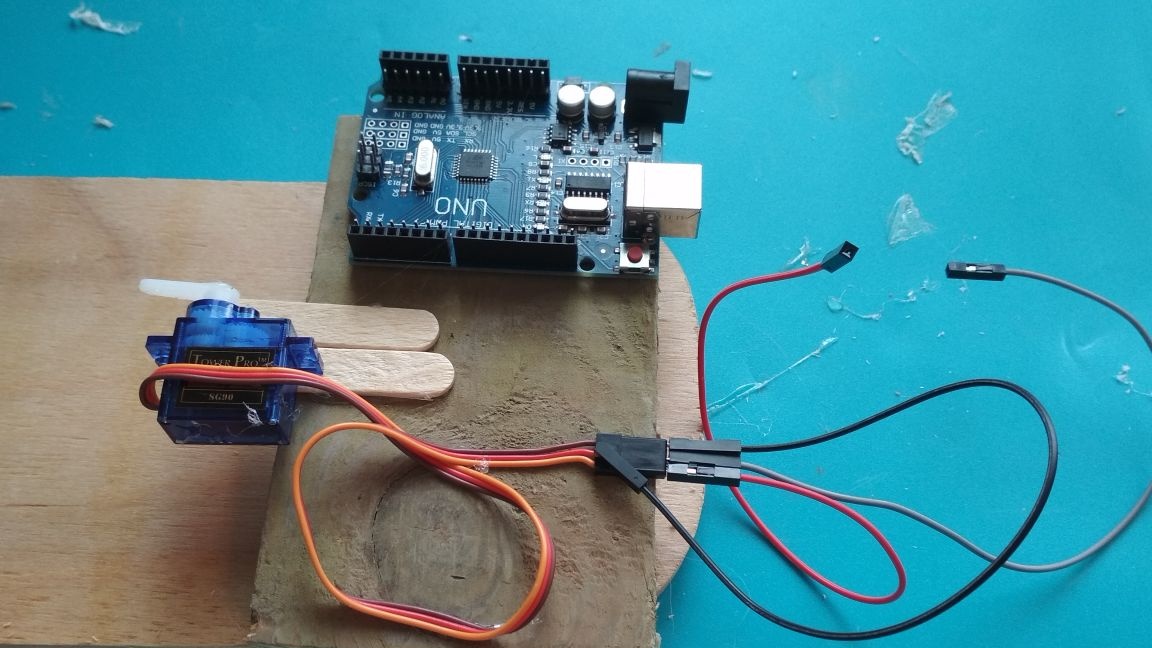
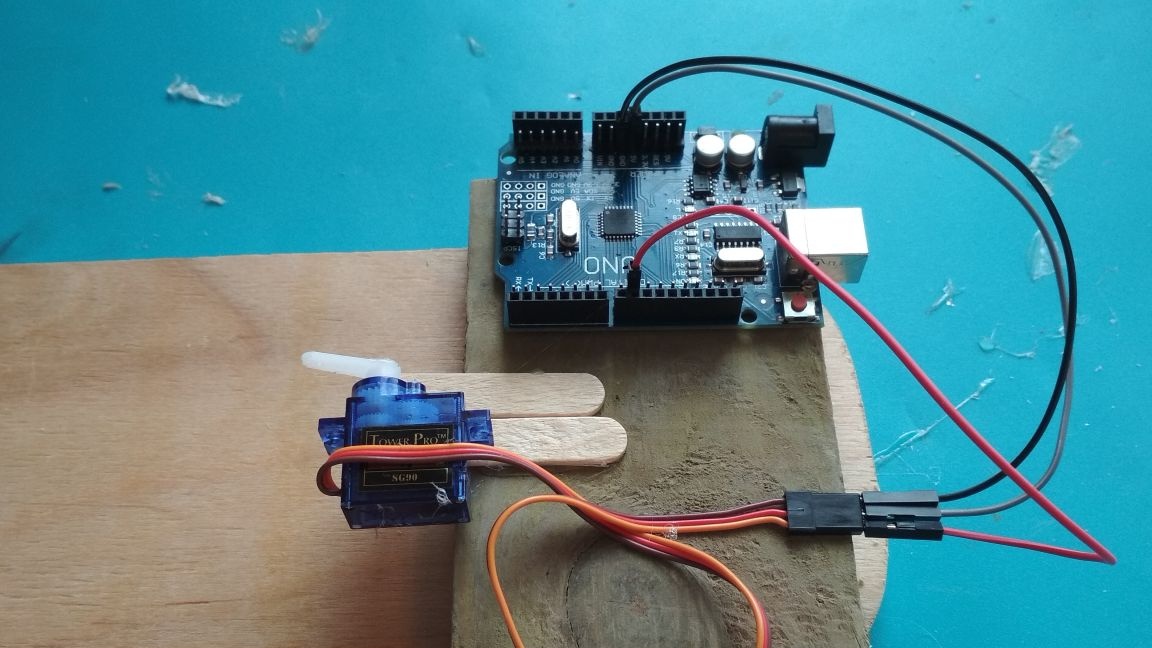
Servopohon připojíme k desce Arduino následujícím způsobem:
hnědý drát do gnd
-Červený drát na 5V
- oranžový drát na 9 "digitální pin"
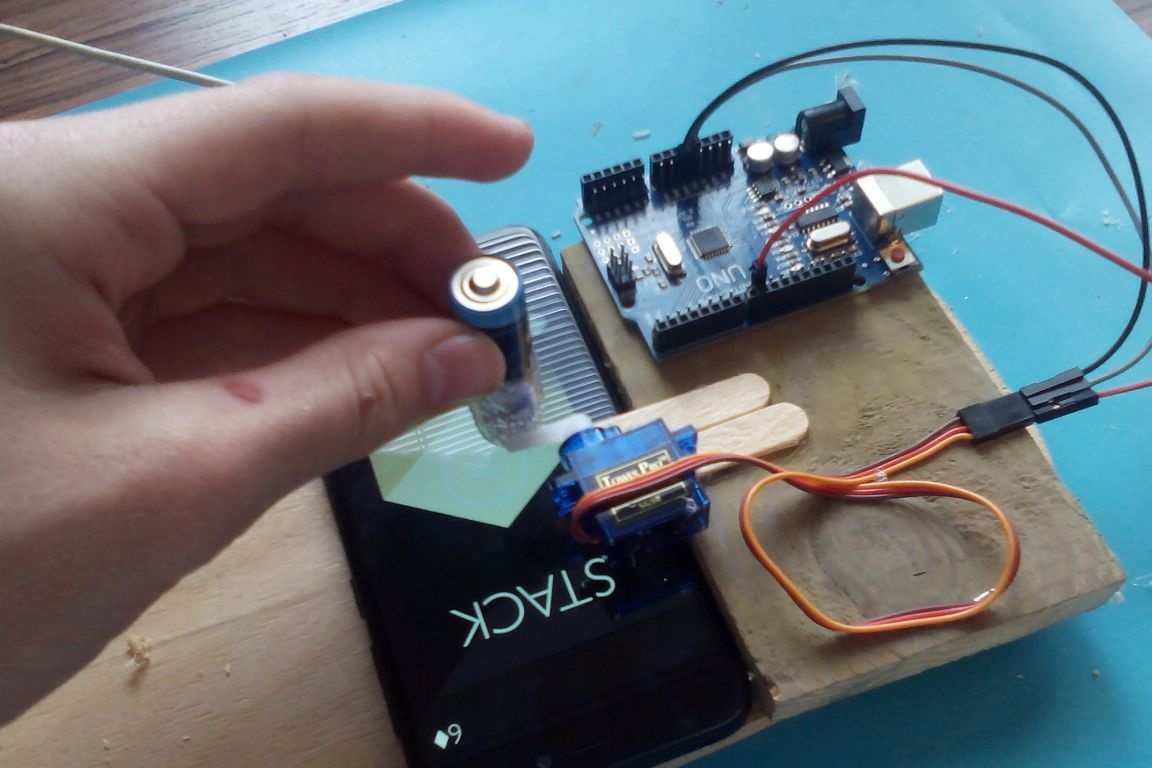
Pokud nemáte stylus, jako je můj, pak nezoufejte, je to velmi jednoduché.
Bereme běžnou baterii prstu a zápornou stranu co nejpevněji, zabalíme fólií a poté ji velmi pevně svineme:

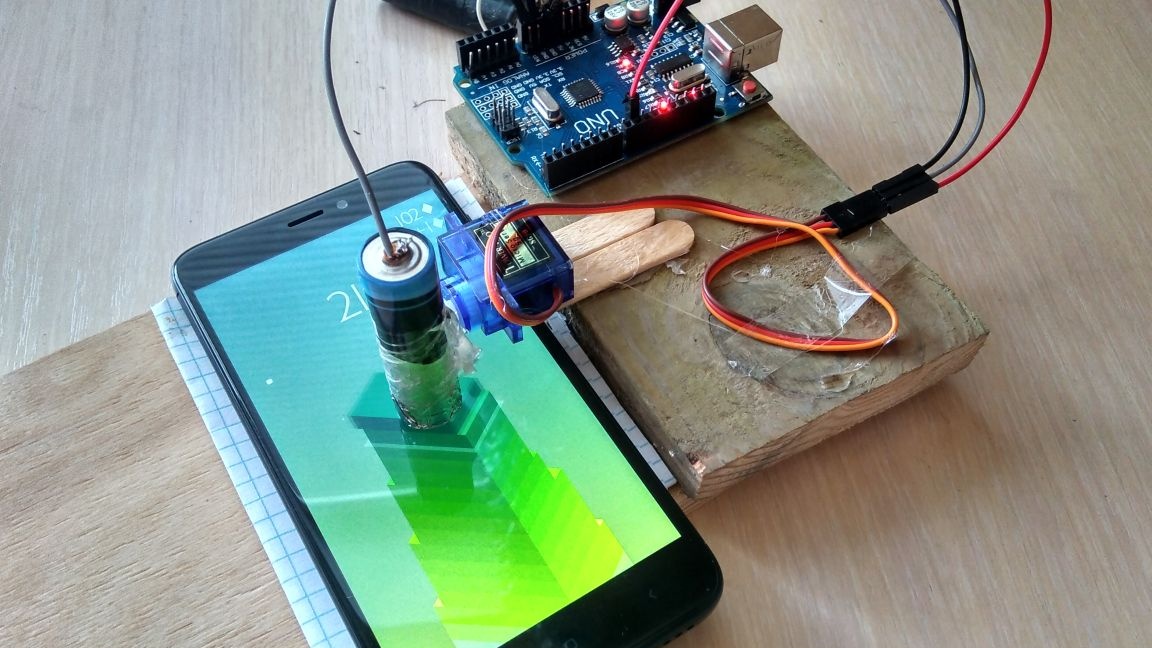
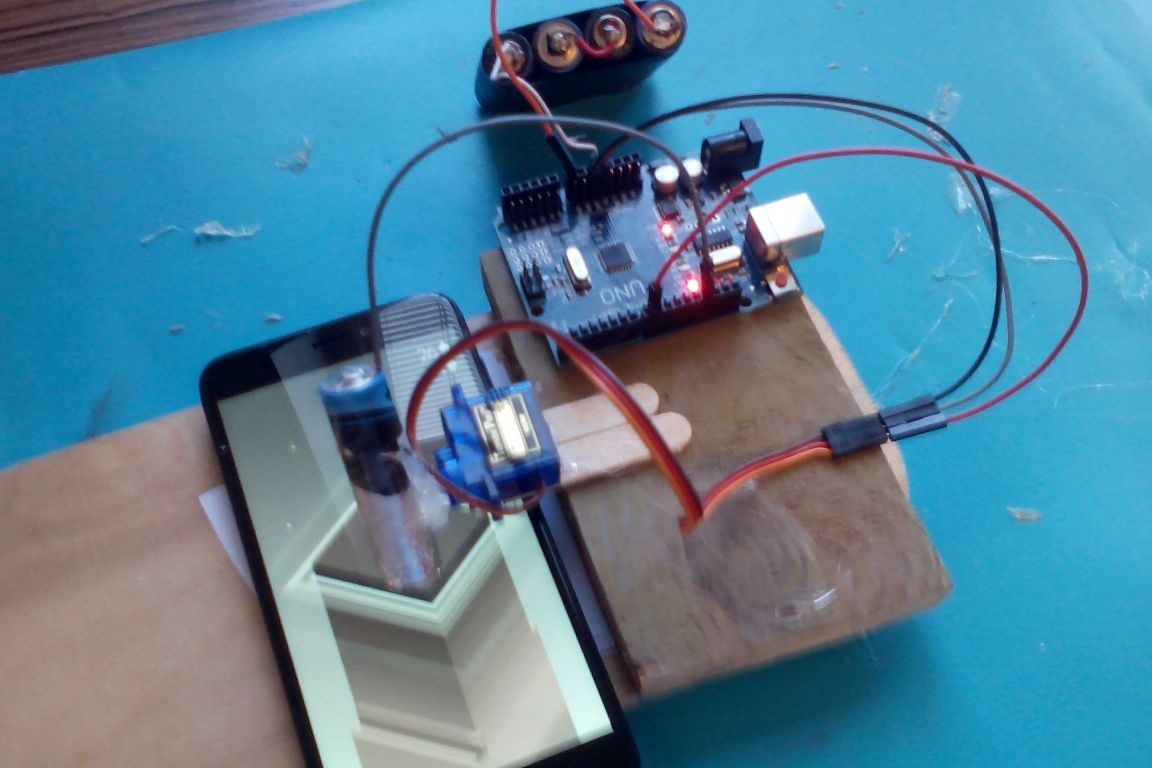
Nyní musíte položit telefon na překližku pod servomotor, připojit baterii nahoře a poznamenat si, na jaké úrovni budeme držet náš „stylus“. Poté, co jsme si všimli všeho, pevně přilepte „stylus“ na páku servomotoru, striktně pod úhlem 90 stupňů (stejný úhel by měl být při aplikaci „stylusu“ na telefon, když jsme jej změřili). Všechno by mělo fungovat tak, jak je vidět na fotografii:

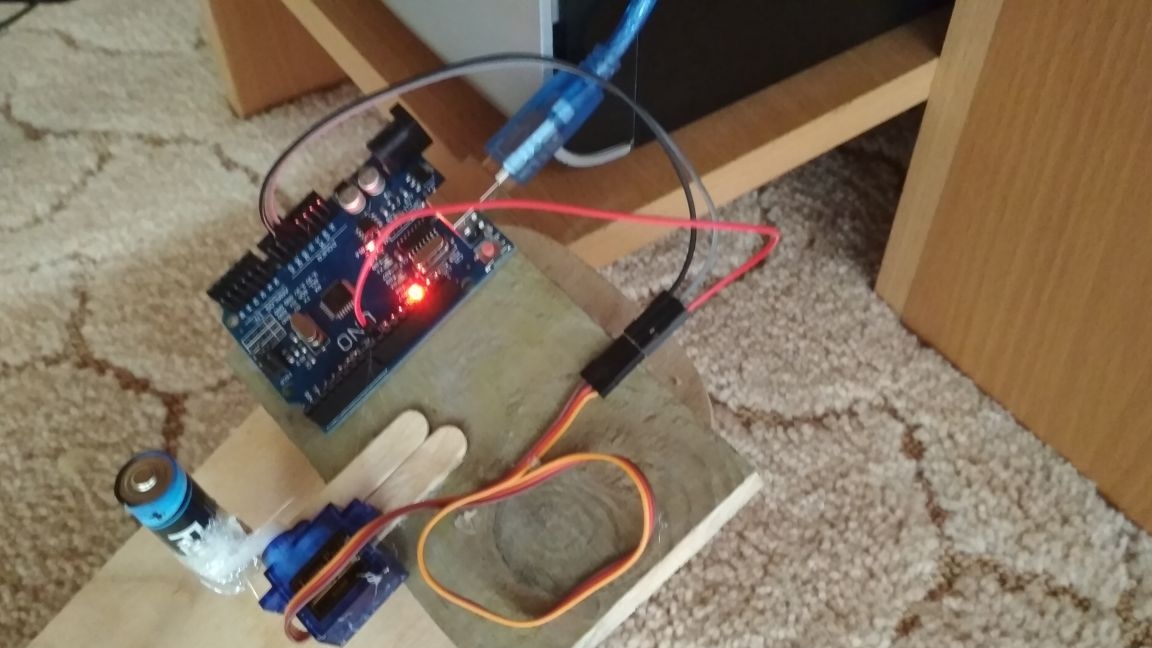
Nyní připojíme náš „robot“ k počítači přes port nakonfigurovaný v Arduino IDE, spusťte dříve pojmenovaný Arduino IDE a zkopírujte náčrt níže, pak klikněte na tlačítko „stáhnout“. Pokud je vše hotovo správně, načte se náčrt bez chyb a po několika sekundách začne servomotor pracovat. Pokud máte významné rozdíly ve velikosti stylusu a servomotoru, pak si tuto skici vytvořte sami, je to docela jednoduché.
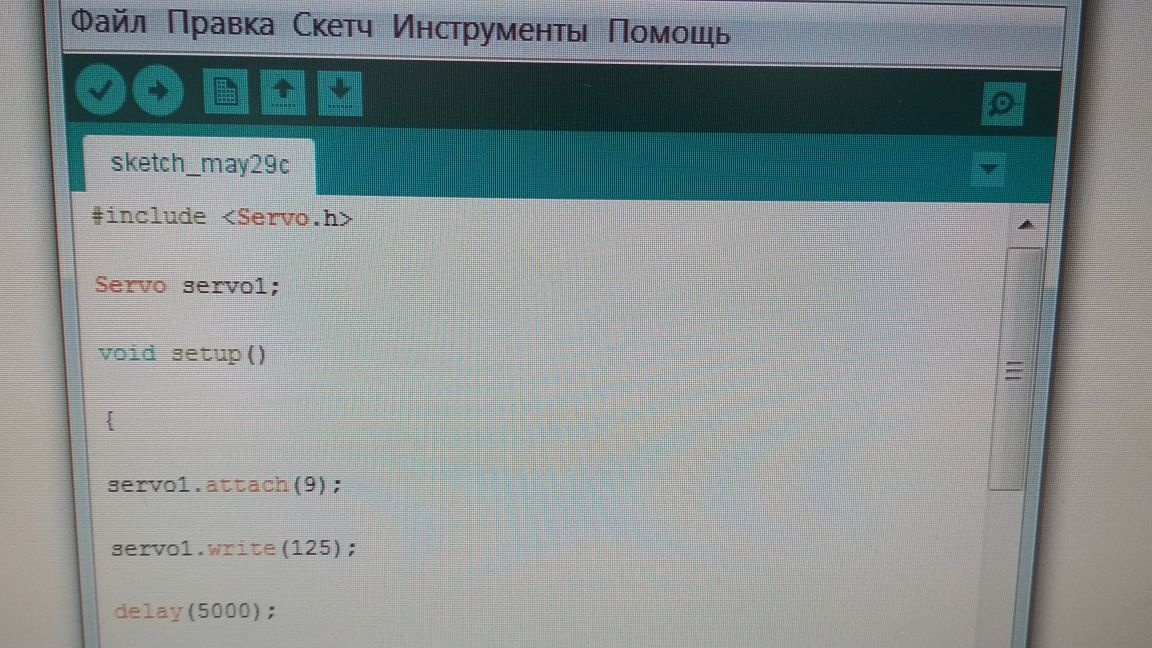
Zde je náčrt:
#include
Servo servo1;
neplatné nastavení ()
{
servo1.attach (9);
servo1.write (125);
zpoždění (5000);
servo1.write (90);
zpoždění (200);
servo1.write (125);
zpoždění (750);
}
prázdná smyčka ()
{
servo1.write (90); // 1
zpoždění (200);
servo1.write (125);
zpoždění (600);
}Pomocí lepicí pásky nebo elektrické pásky navíjíme odizolovanou stranu drátu typu „matka k matce“ s odříznutým „mateřským“ výstupem na plusovou stranu našeho „stylusu“ a tento vodič posíláme na Gnd na Arduino:
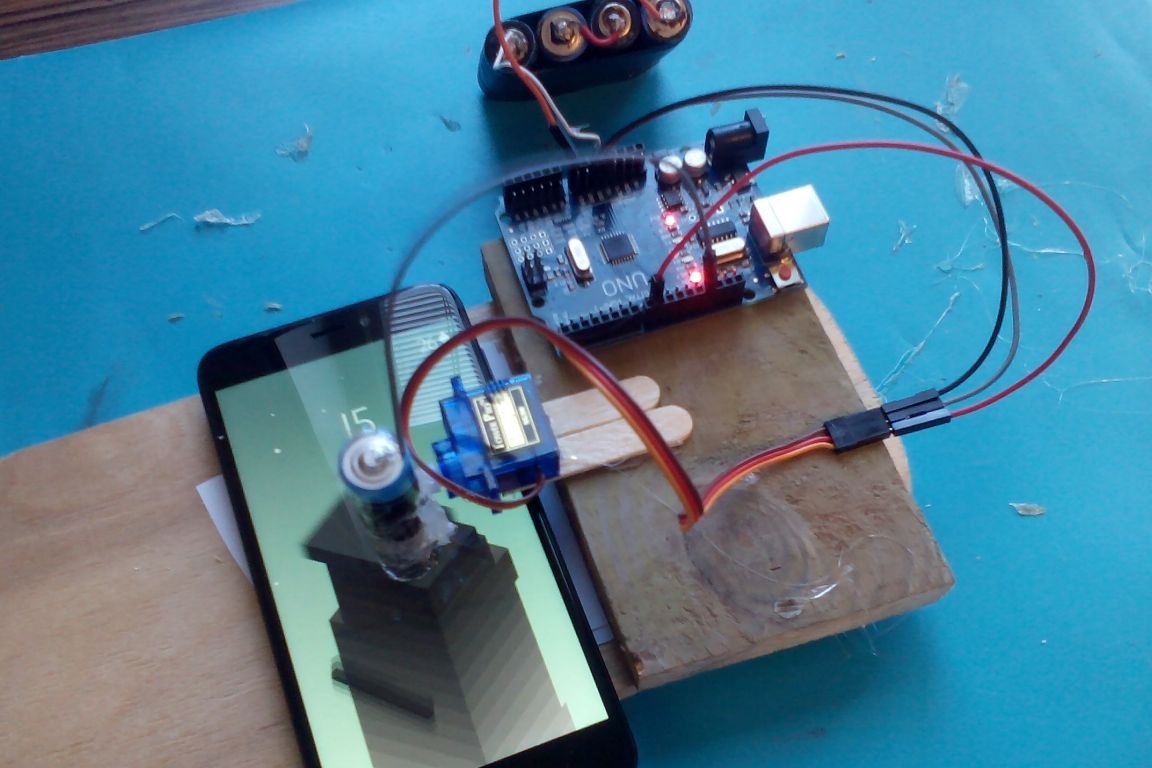
No, to je vše! Naše jednoduché robot připraven a zbývá jen vyzkoušet! Chcete-li to provést, umístěte telefon pod stylus, spusťte aplikaci Stak a umístěte telefon tak, aby byl nad tlačítkem „play“, které je označeno šipkou, připojíme napájení k arduinu buď pomocí speciálního adaptéru, nebo vyvedeme plus z naší „baterie“ na Uin na Arduino a mínus gnd. po připojení napájení náš robot okamžitě začne „hrát“. A přestože jsem nepoužíval normální stylus, ale baterii, náš robot se často často nedostal do tempa a zmeškal ho, „přesto hrál dlouhou dobu. Pokud je vše provedeno velmi přesně, bude obecně hrát, dokud telefon neklesne.

Děkujeme vám všem za pozornost!