


Část svého návrhu jsem převzal z montážních pokynů pro Lego Technic 42029. Zbytek je moje improvizace. Potřebujeme tedy:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (lepší než Populus, ale můžete mít i čínského protějšku)
- 2 servopohony SG-90
- IR přijímač
- Motorová převodovka 200 ot / min
- 2 LED diody
- 2 odpory 150 ohmů
- Kondenzátor 10v 1000uF
- 2 jednoradové hřebeny PLS-40
- 2 konektory PBS-20
- Induktor 68mkGn
- 6 baterií NI-Mn 1,2 V 1000 mA
- Konektor táta-máma dva kolíky na drát
- Homutiku
- dráty různých barev
- pájka
- Rosin
- psací potřeby
- páječka
- Šrouby 3x40 a matice a podložky pro ně
- Šrouby 3x60
- Baterie Ni-Mn 1,2 V 1000 mA 6ks.
Krok 1 sbíráme zadní část zavěšení.
Nejprve musíte sestavit zadní zavěšení podle pokynů Lego 42029 část 1, počínaje 3 stranami a 8 včetně. Dále přidejte několik podrobností, abyste mohli nainstalovat motor a převodovku.

Krok 2 přední zavěšení.
Montujeme přední část odpružení podle pokynů Lego 42029 část 1, od strany 21 do 23. Bereme lichoběžník z druhé části pokynů Lego od strany 6 do 11. Sestavujeme naviják z druhé části strany 14 - 22. A druhá část nárazníku je 34 - 36 stran.
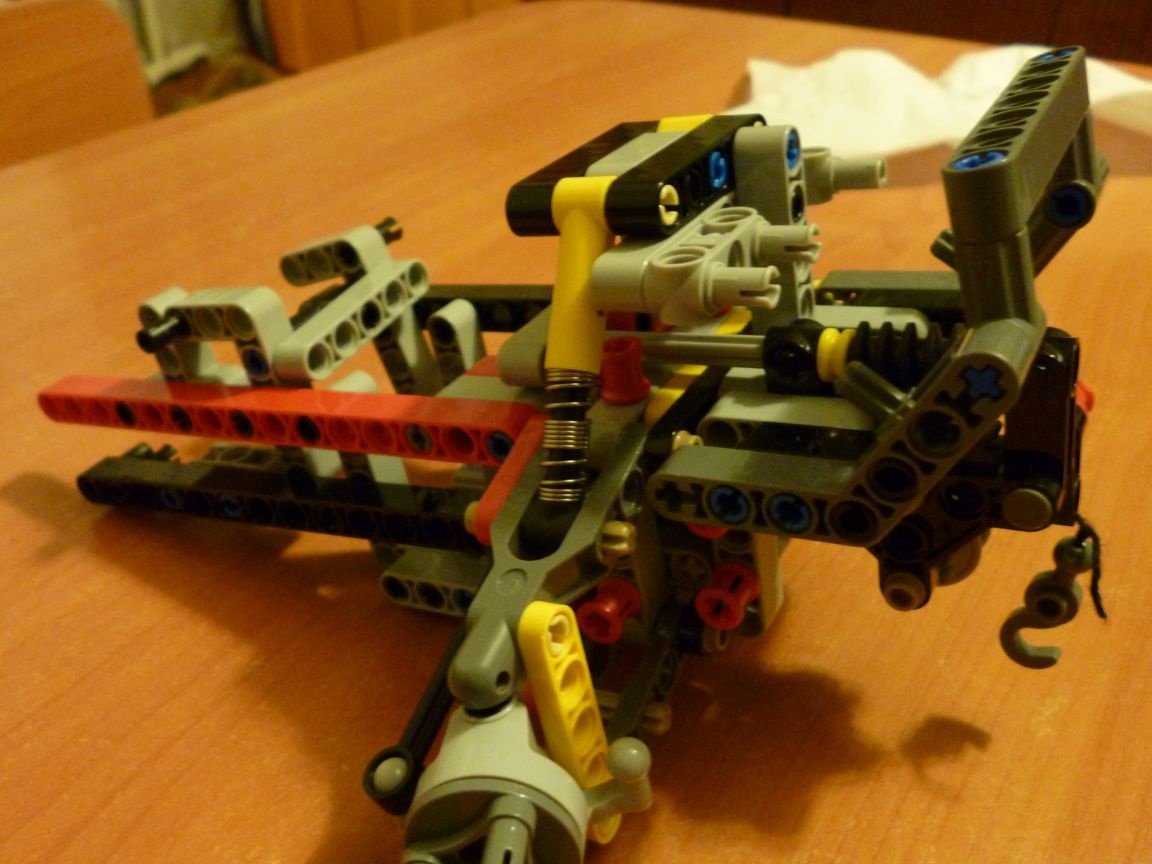

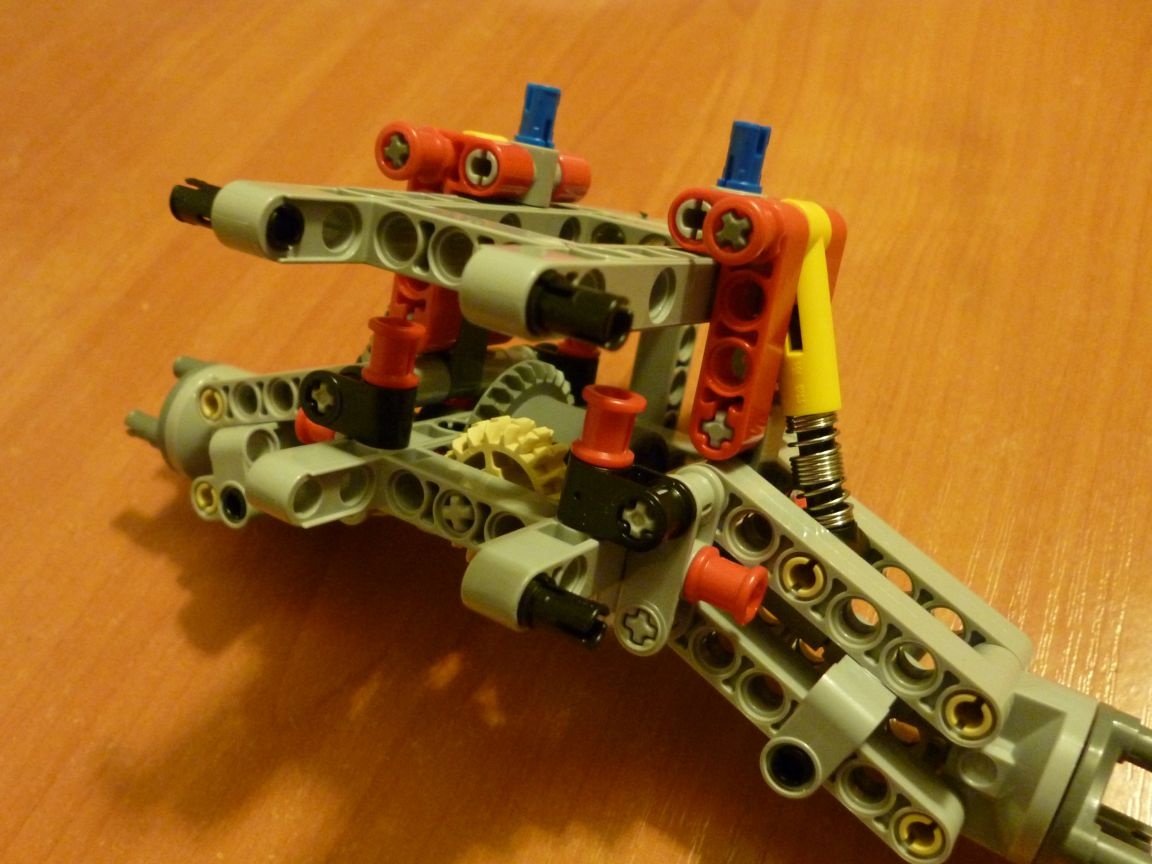
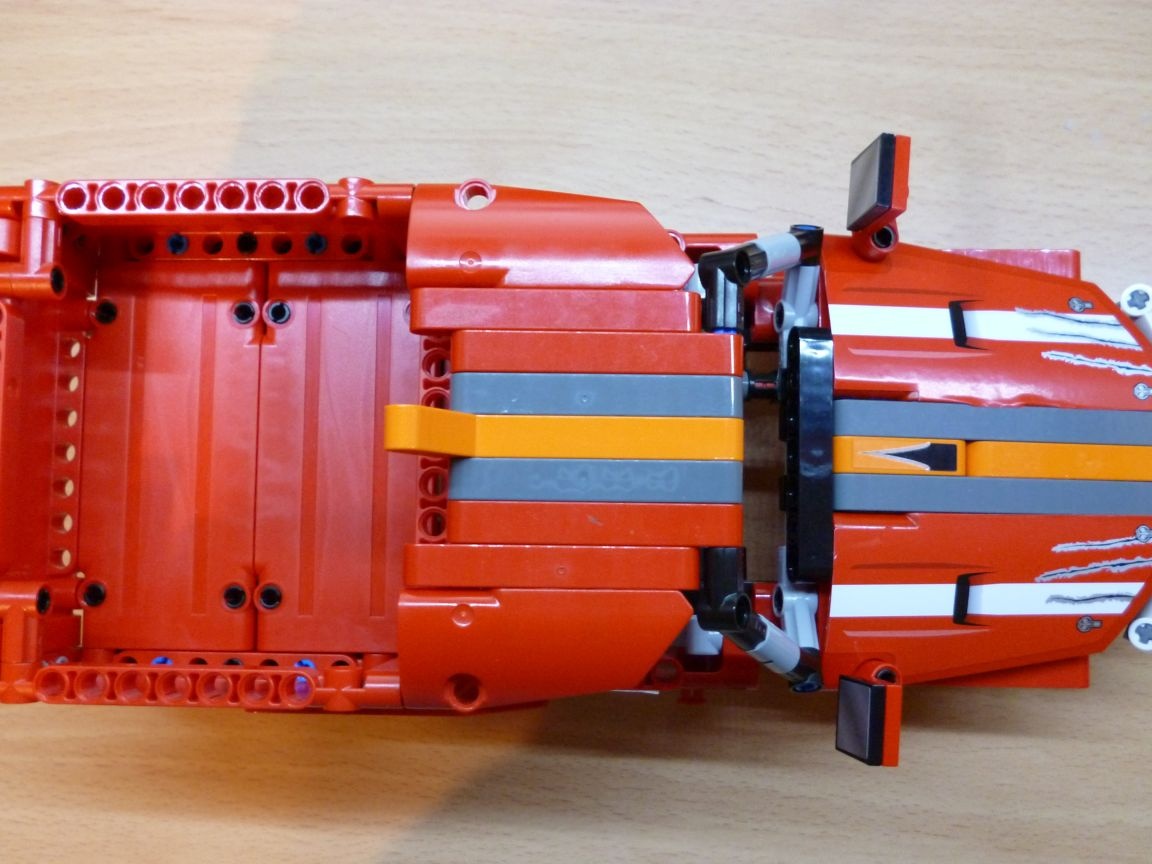
Krok 3 sestavte podvozek.
Spojujeme obě části, jak je znázorněno na fotografii:

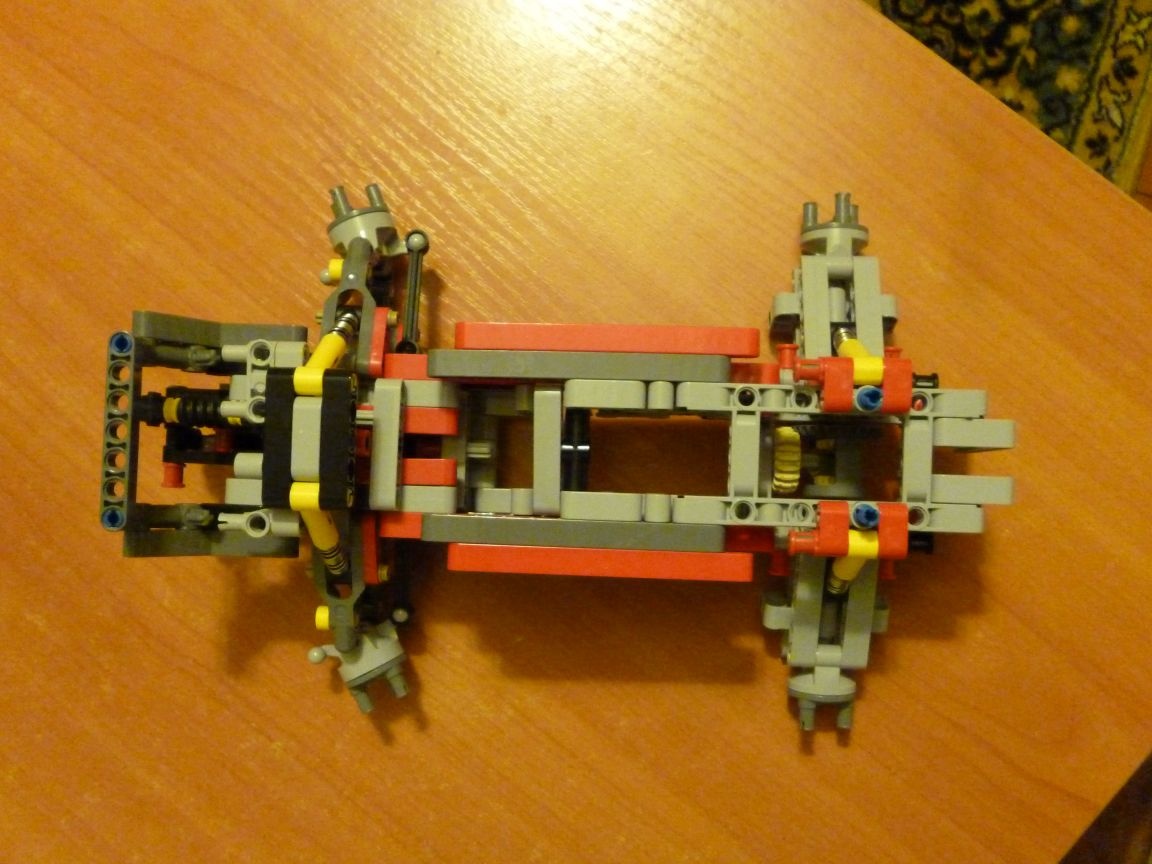
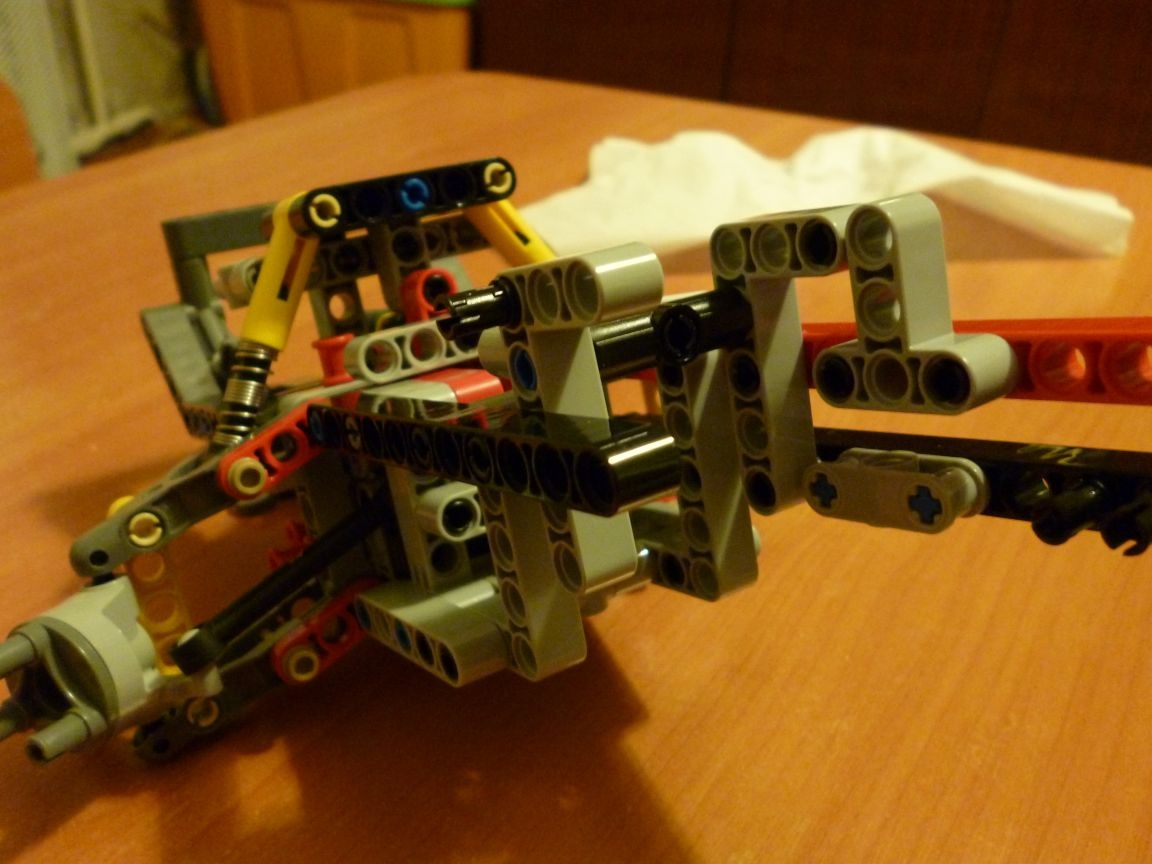
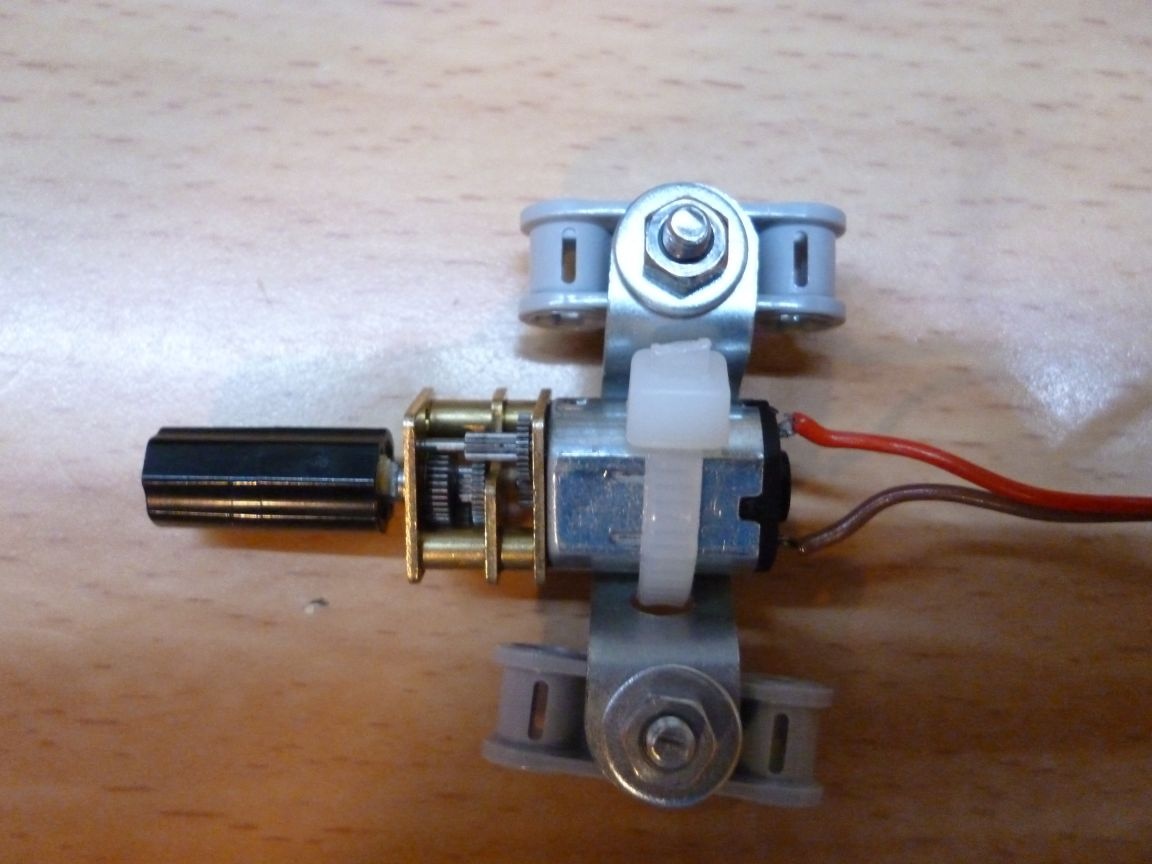
Problém propojení převodového motoru s částmi designéra jsem vyřešil následovně: Položil jsem spojovací pouzdro na osu převodového motoru a vložil zápalkový kus pro upevnění. K montáži převodového motoru použijte kovový plast od návrháře železa a svorku.
Ukázalo se následující:
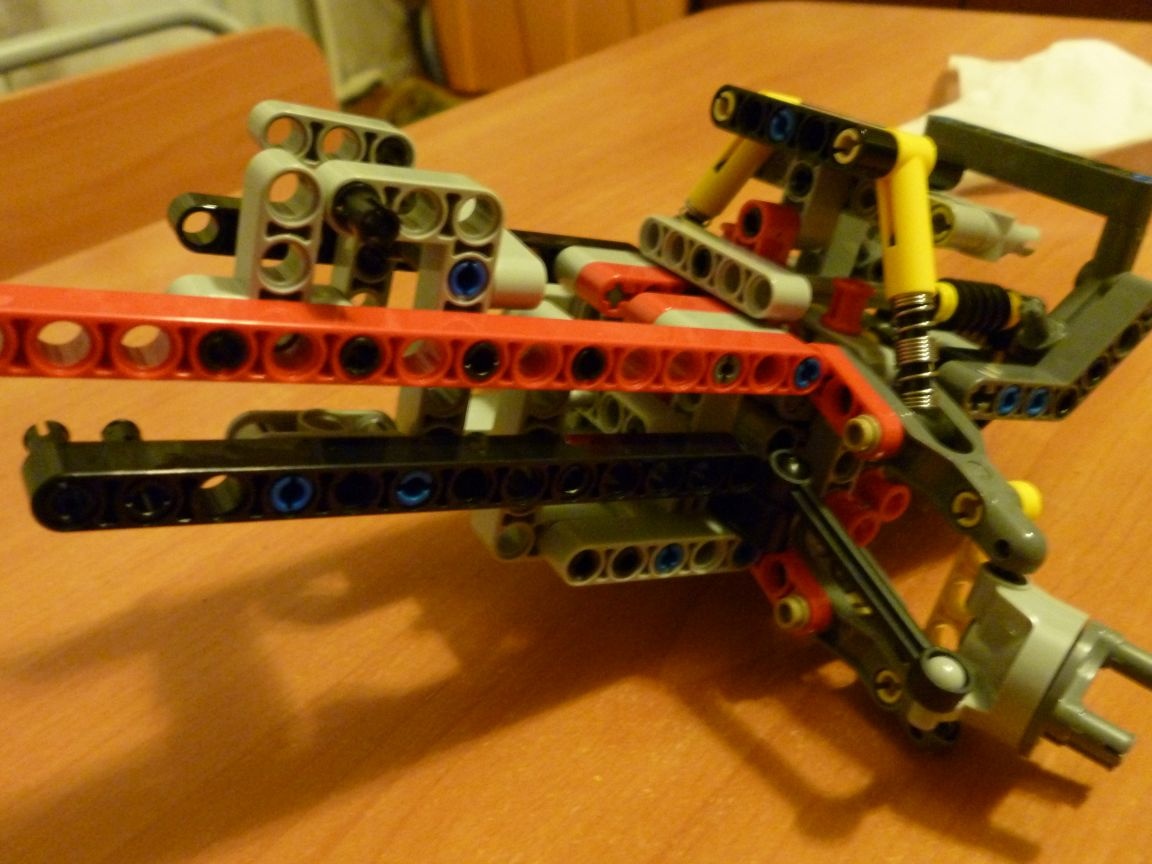
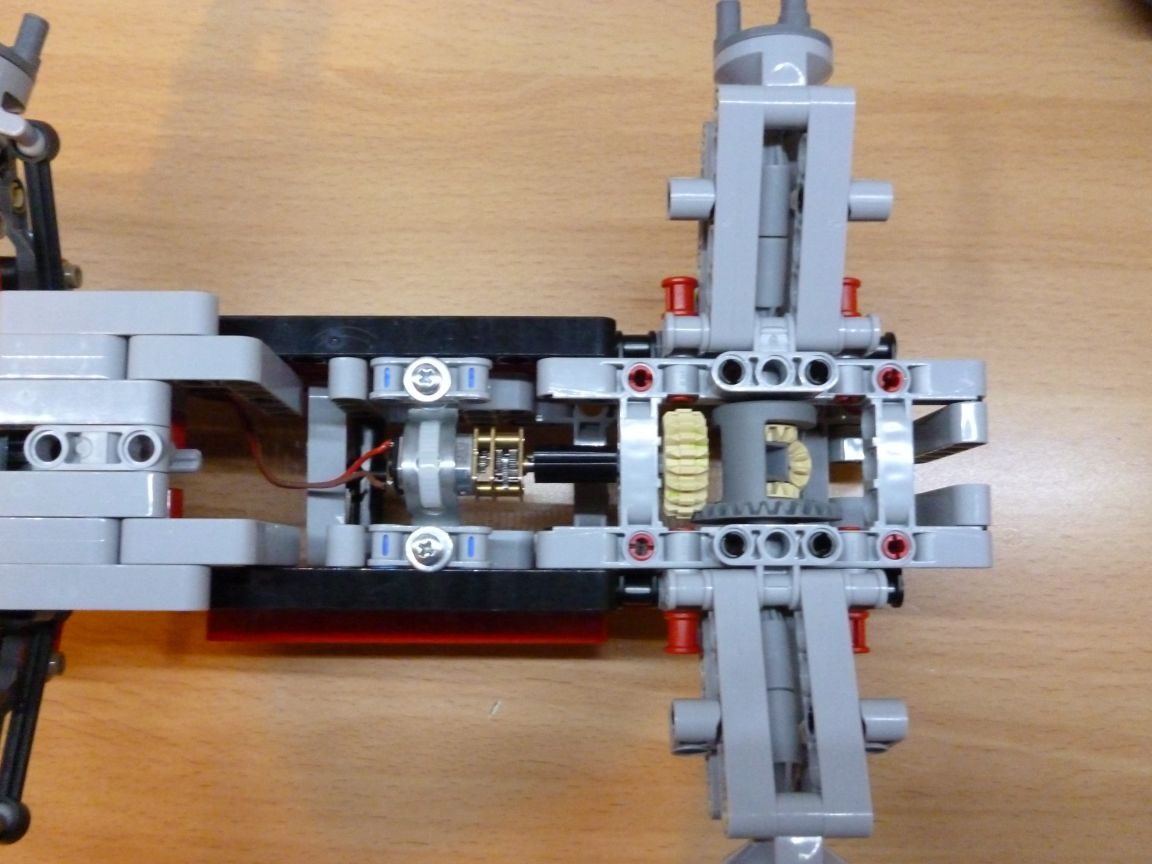
Montáž na podvozek:
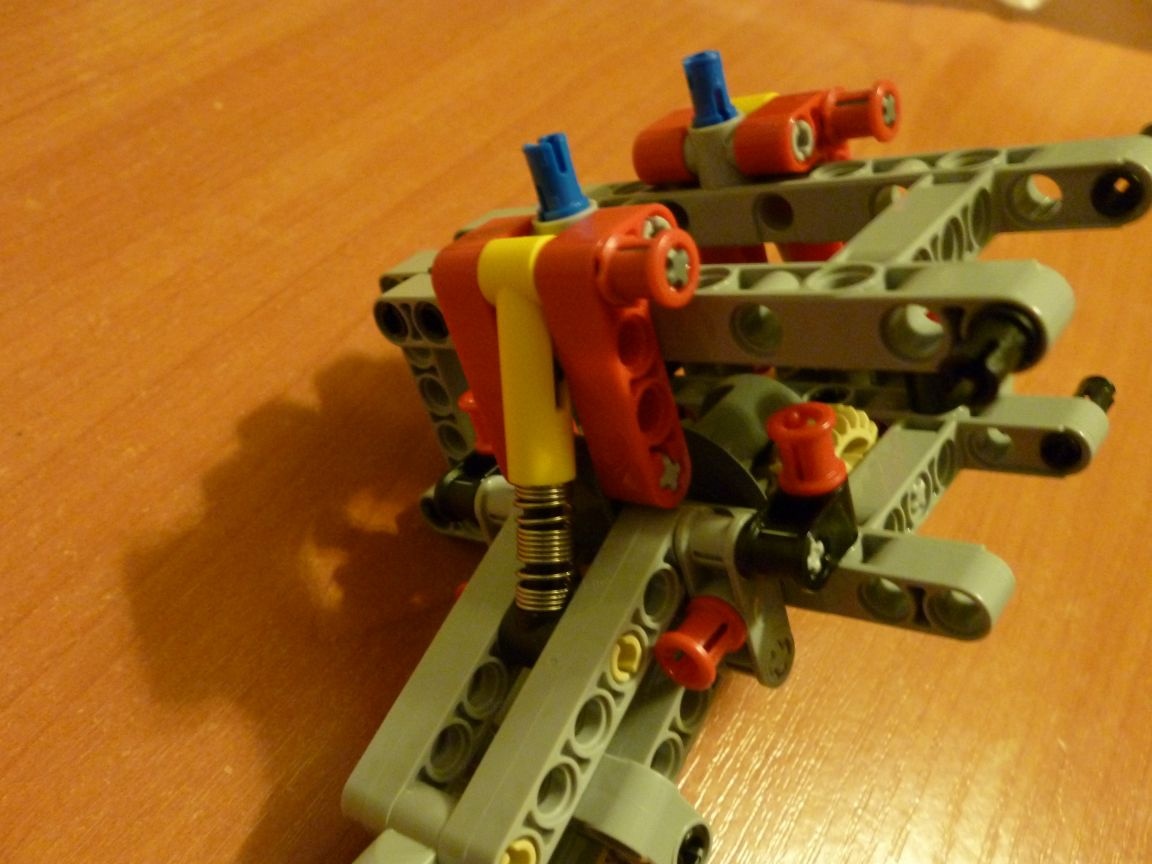
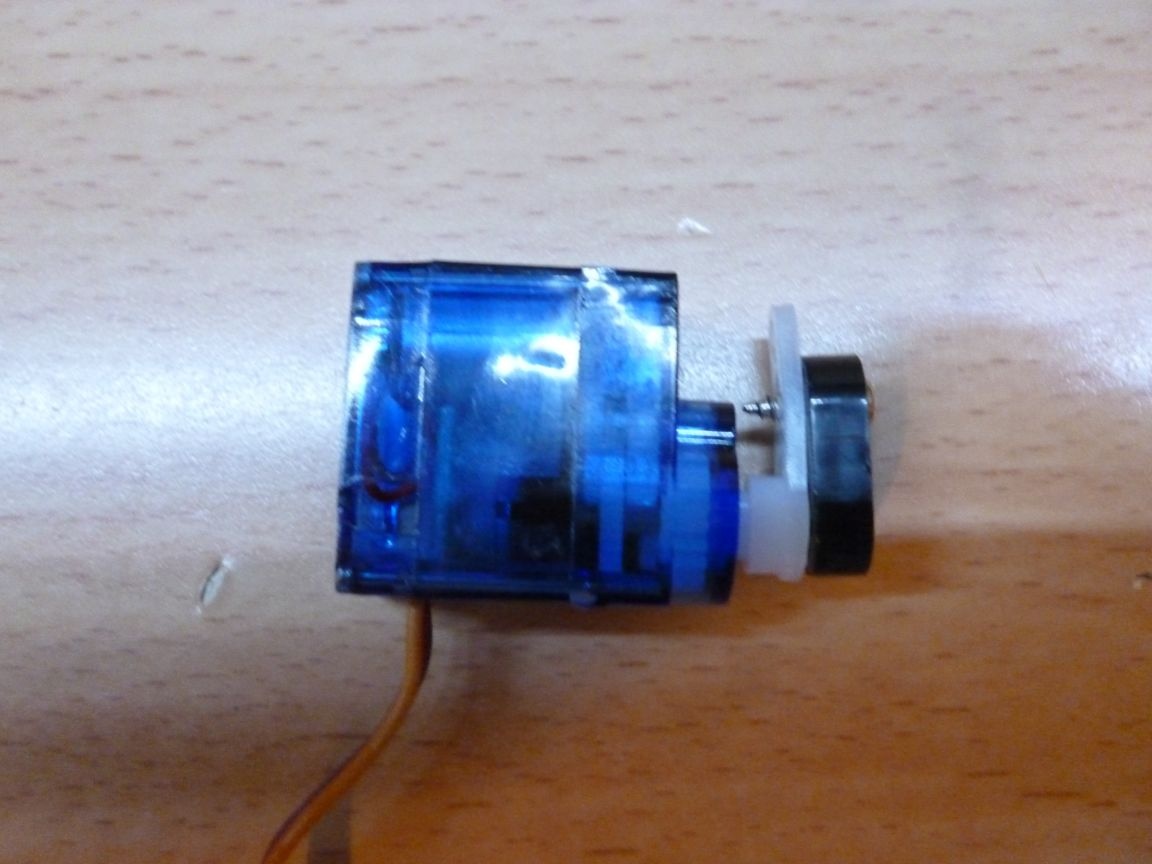
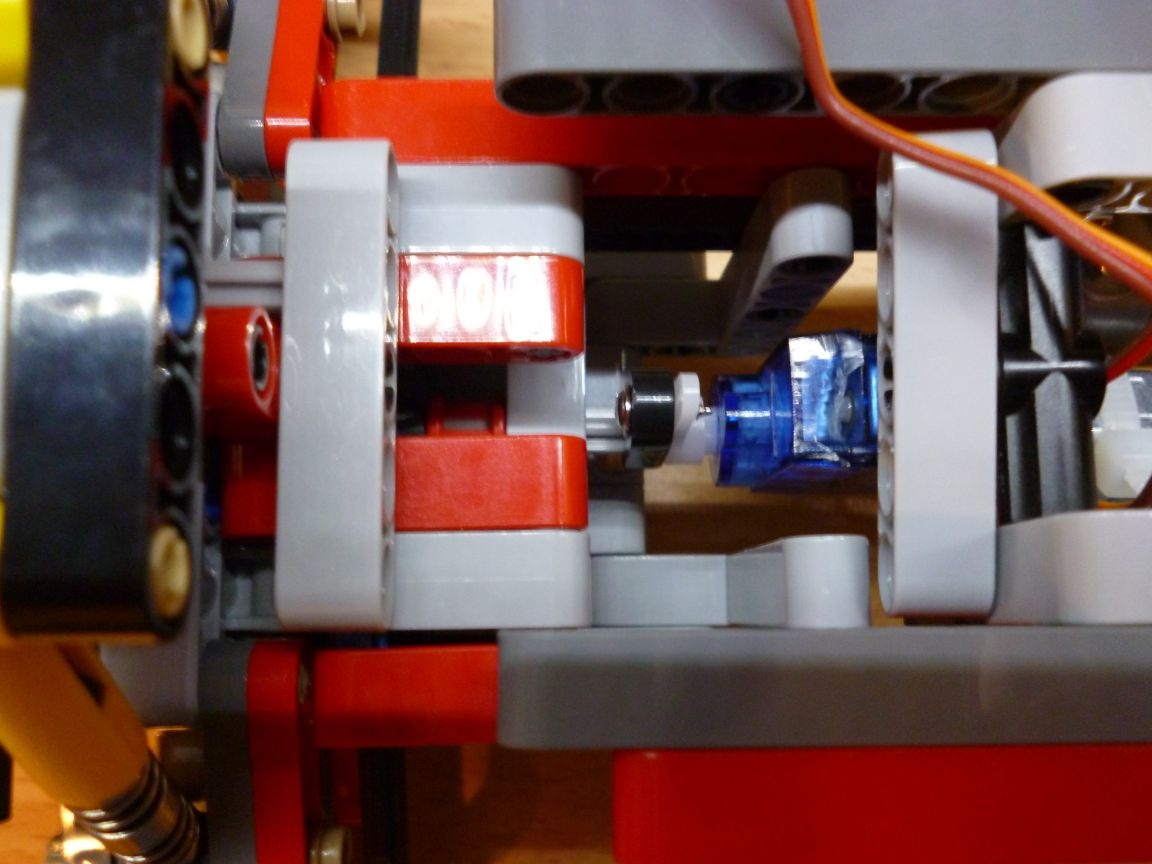
Pro provedení rotace vzal servo SG-90. Je třeba pečlivě vyvrtat vnitřní otvory, průchozí otvor o průměru 3,2 mm nebo pouze řezat střihovým nožem. A také odstřihněte vyčnívající části („křídla“ pro upevnění). Do vytvořeného otvoru vložíme šroub a upevníme jej maticemi. Na servo hřídeli jsme nasadili páku se šroubovanou částí z lega:
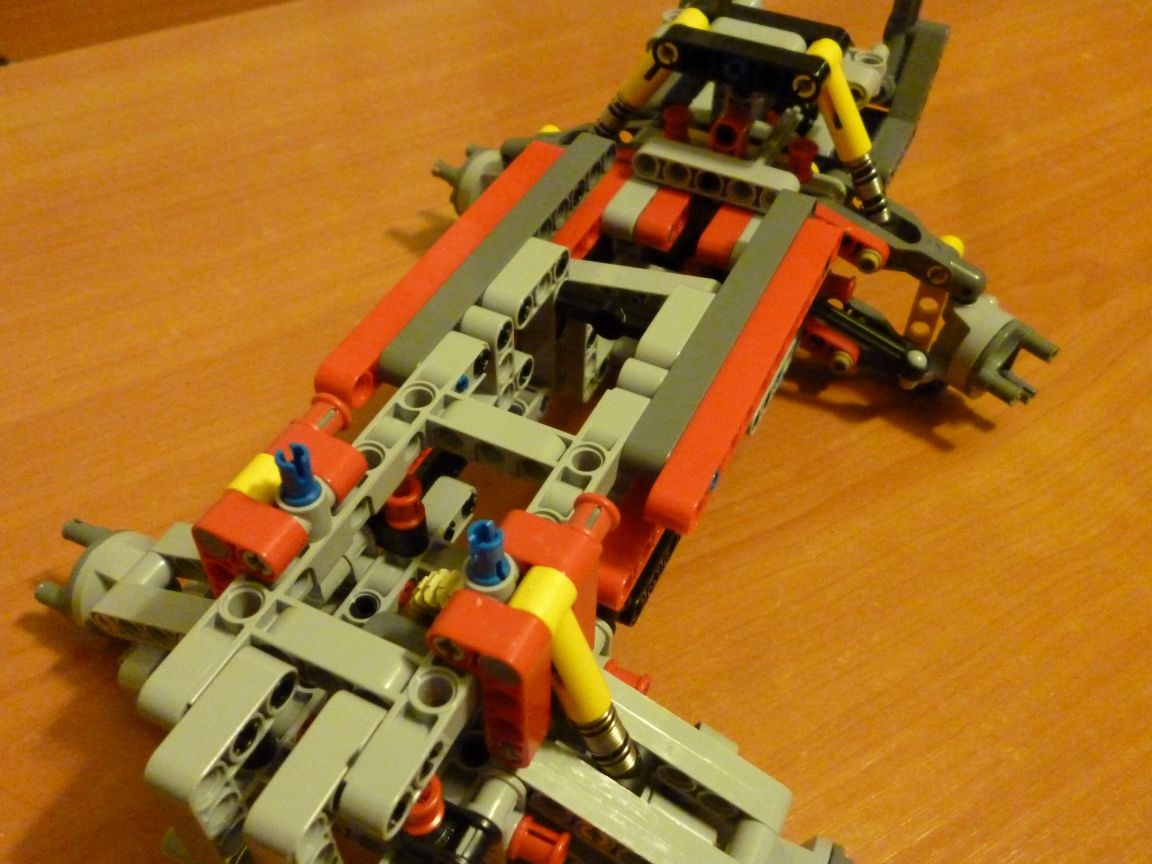
Instalace:
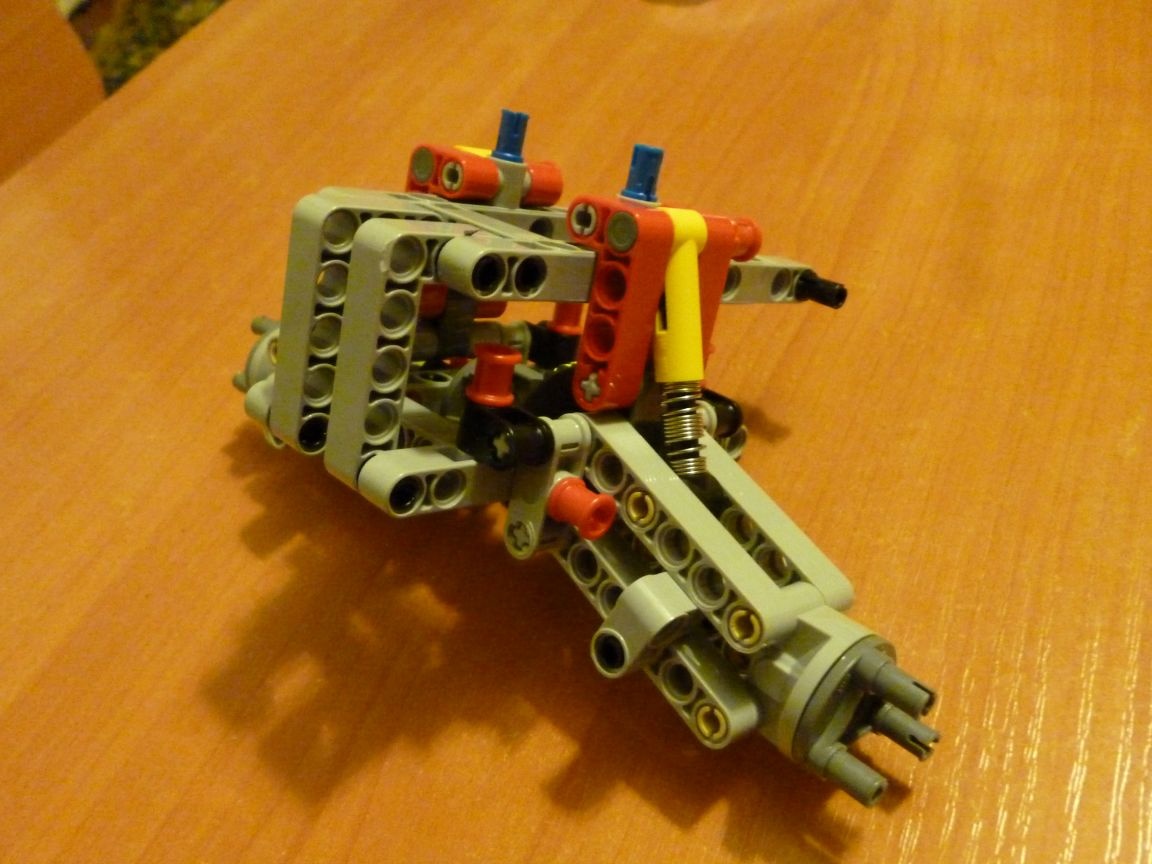
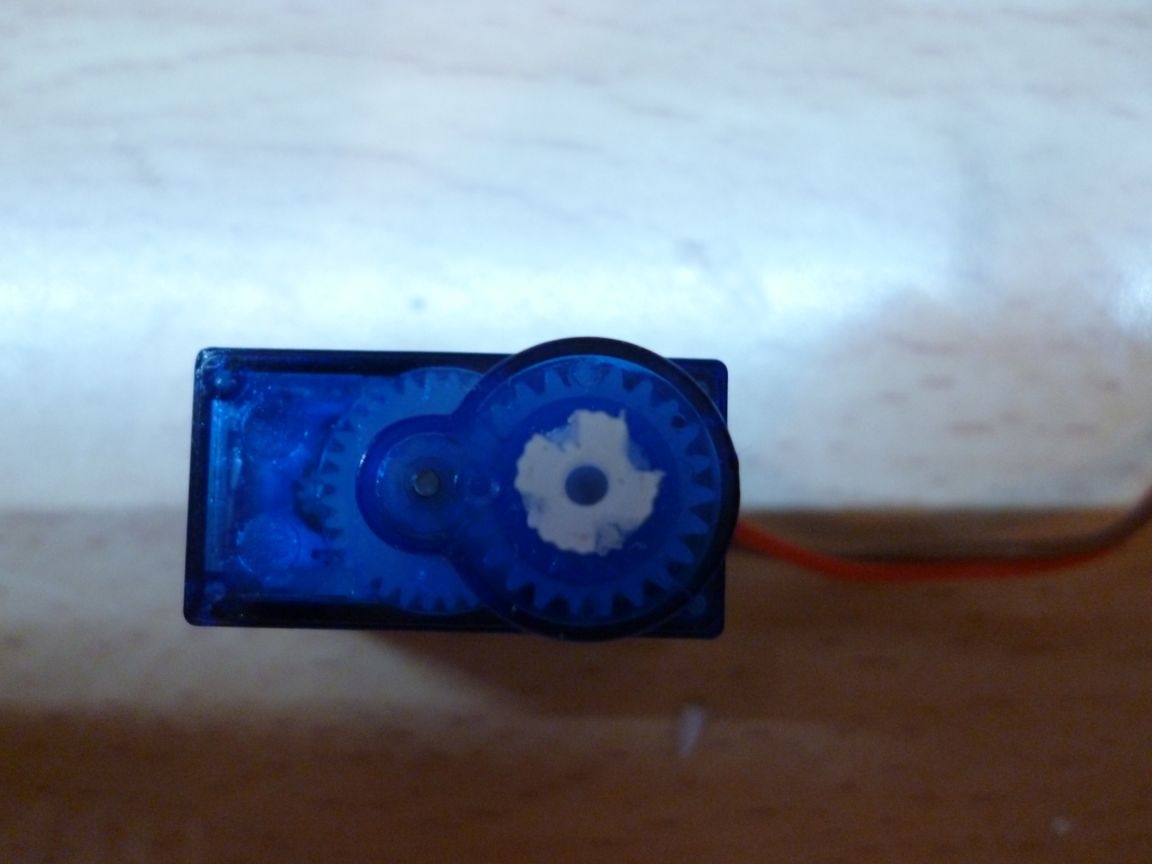
Druhé servo použijeme pro naviják. Děláme to samé jako u prvního. A nyní je třeba ji modernizovat, aby se mohla volně otáčet. Za tímto účelem demontujeme servopohon, vyjmeme desku a pájíme dráty přímo k motoru. Vytáhneme hlavní rychlostní stupeň a přerušíme jeho zarážky pojezdu.A nakonec uděláme štěrbinu s úředním nožem na hlavním zařízení jako na fotografii:
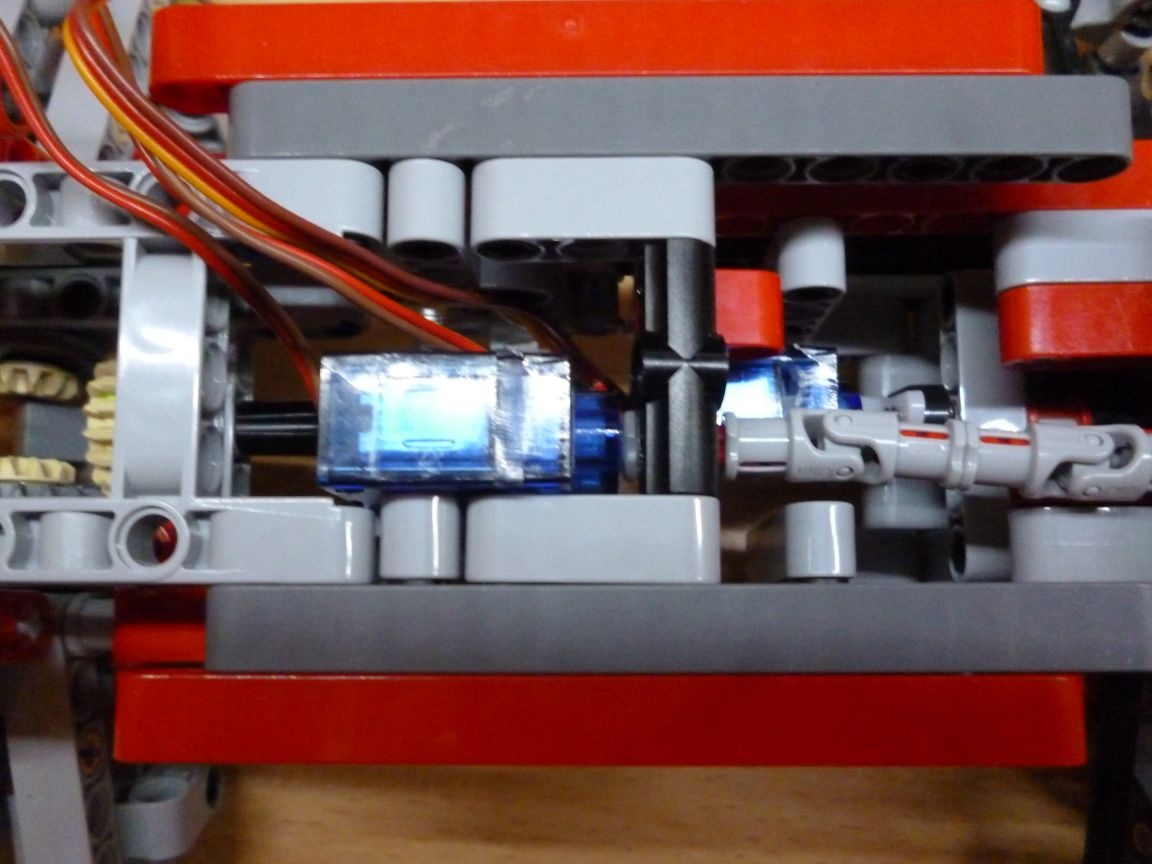
Připojíme se k našemu navijáku a nasadíme na podvozek:

Krok 4 Správa řadiče
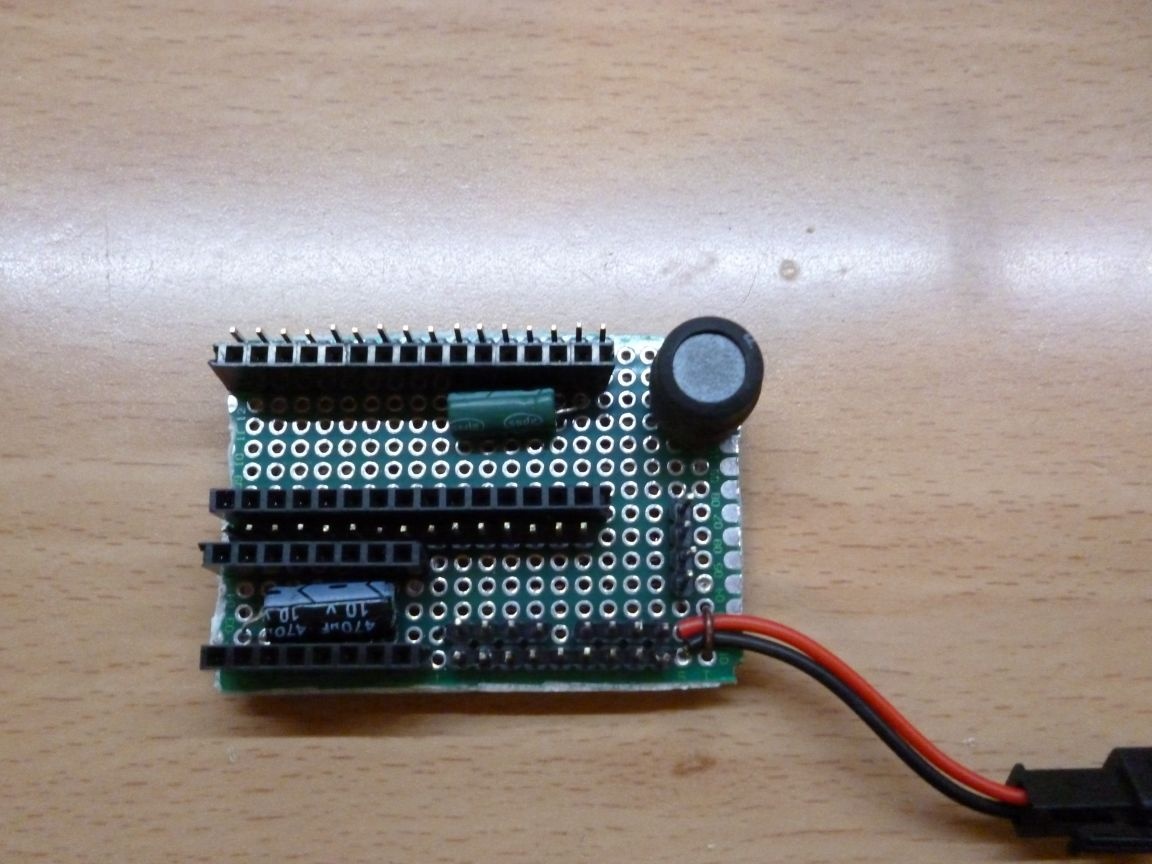
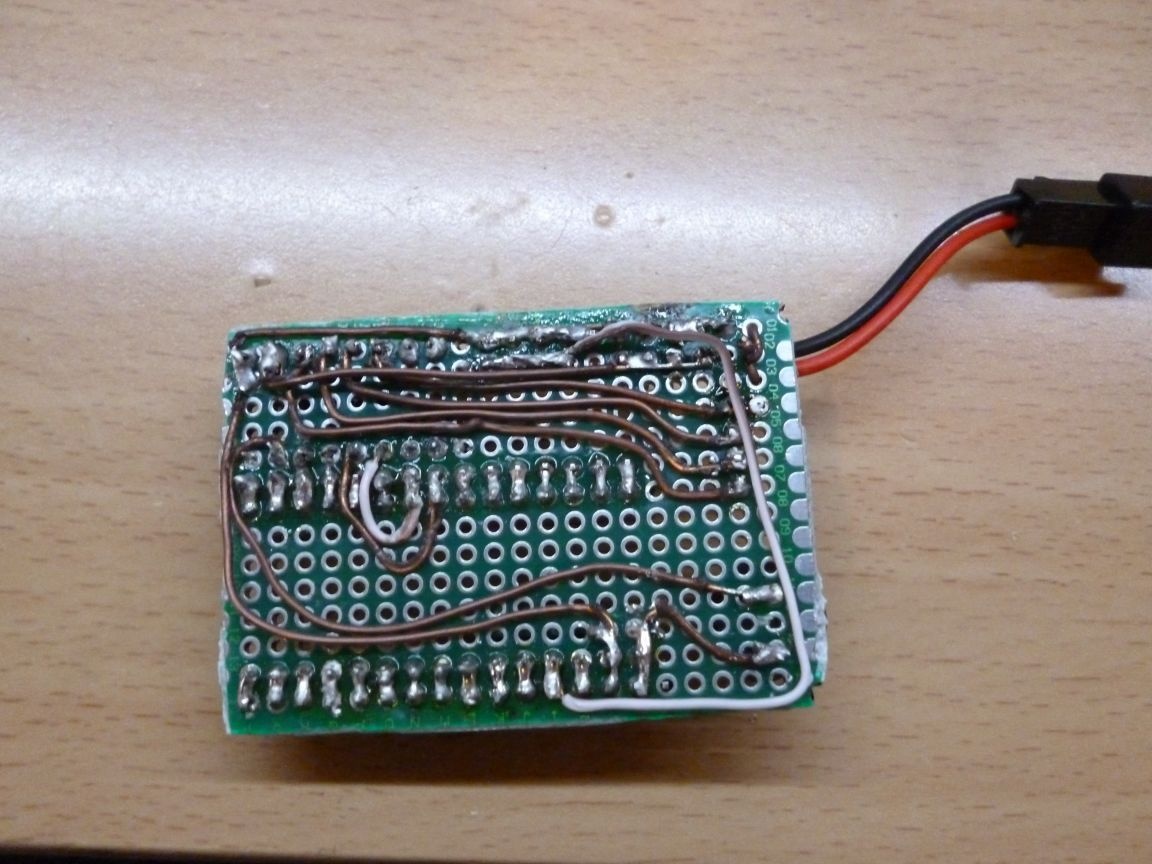
Pro ovládání použijeme Arduino a IR přijímač. Vezmeme páječku a na desku plošných spojů sestavíme:
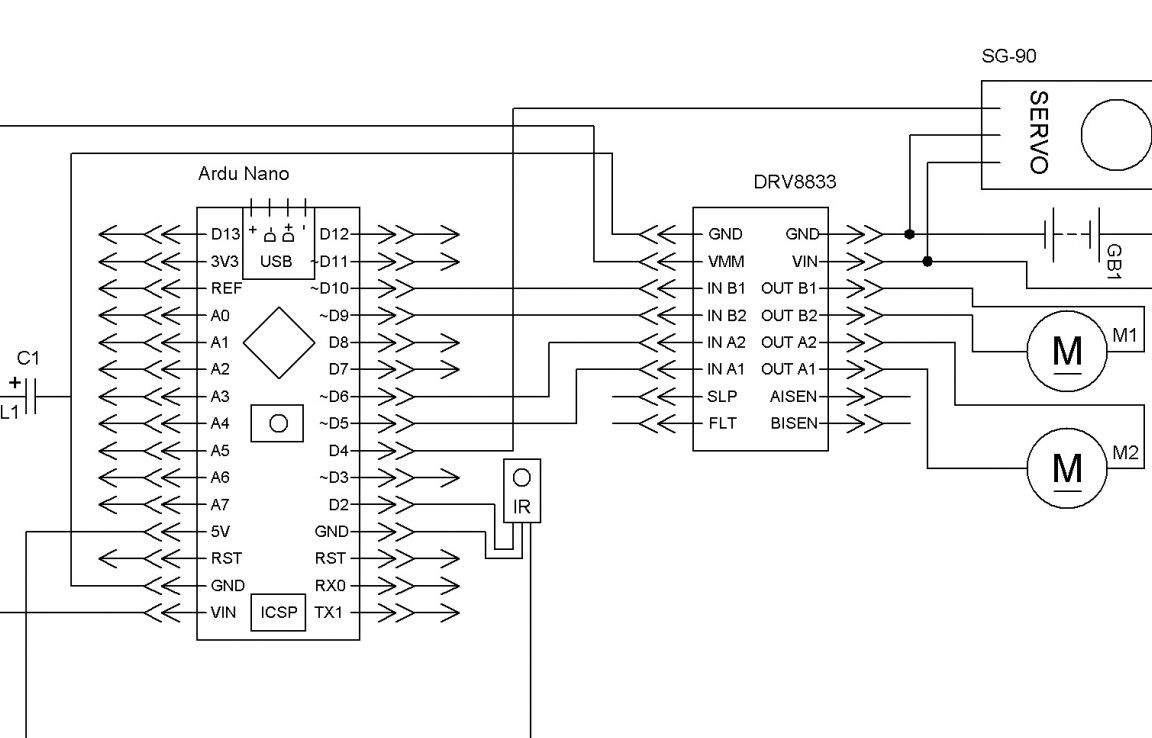
Vysvětluji: jakýkoli nízkonapěťový kondenzátor, indukční cívka, kterou také najdete, musíte stabilizovat napětí mikrokontroléru. Pro použité LED diody jsou vybrány rezistory. IR přijímač nebo TSOP lze odebrat ze staré hračky nebo zakoupit v obchodě s rádiem. Pokud existuje silné rušení, přidejte kondenzátor do napájecího obvodu IR přijímače.
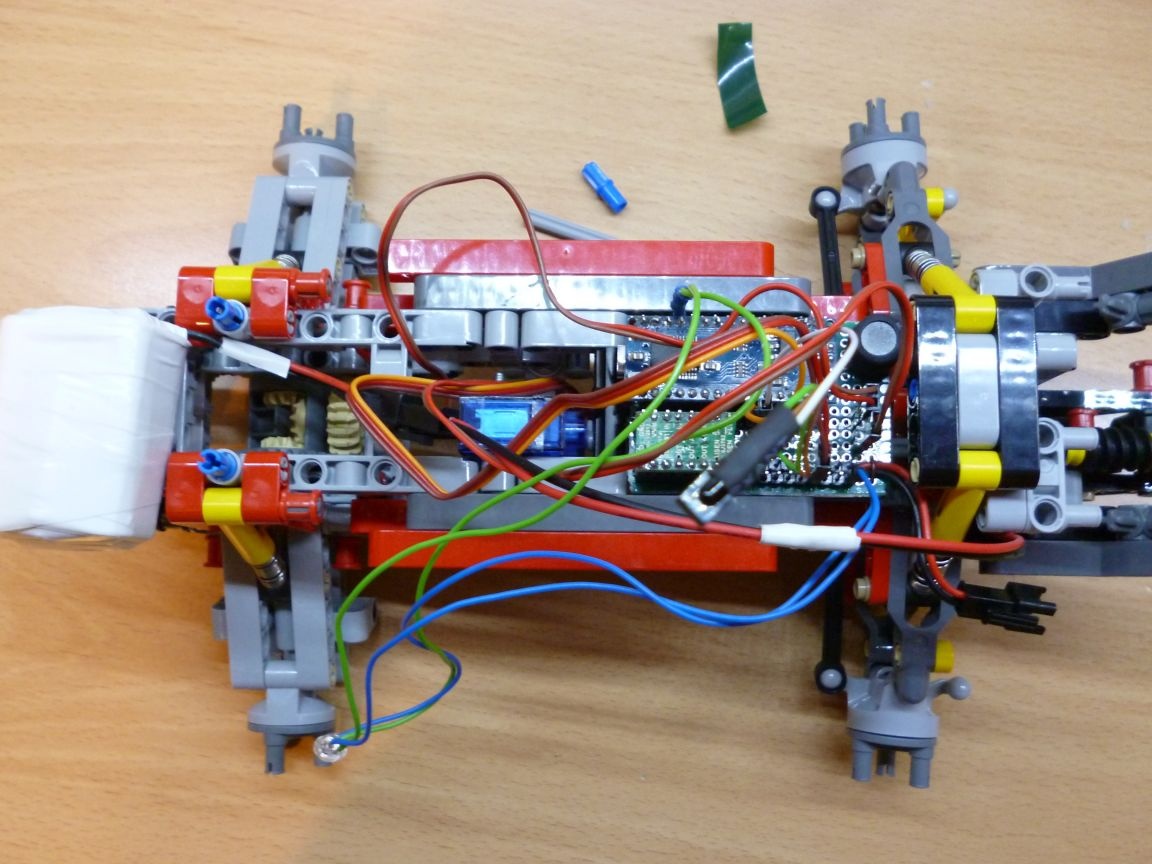
Výsledkem je:
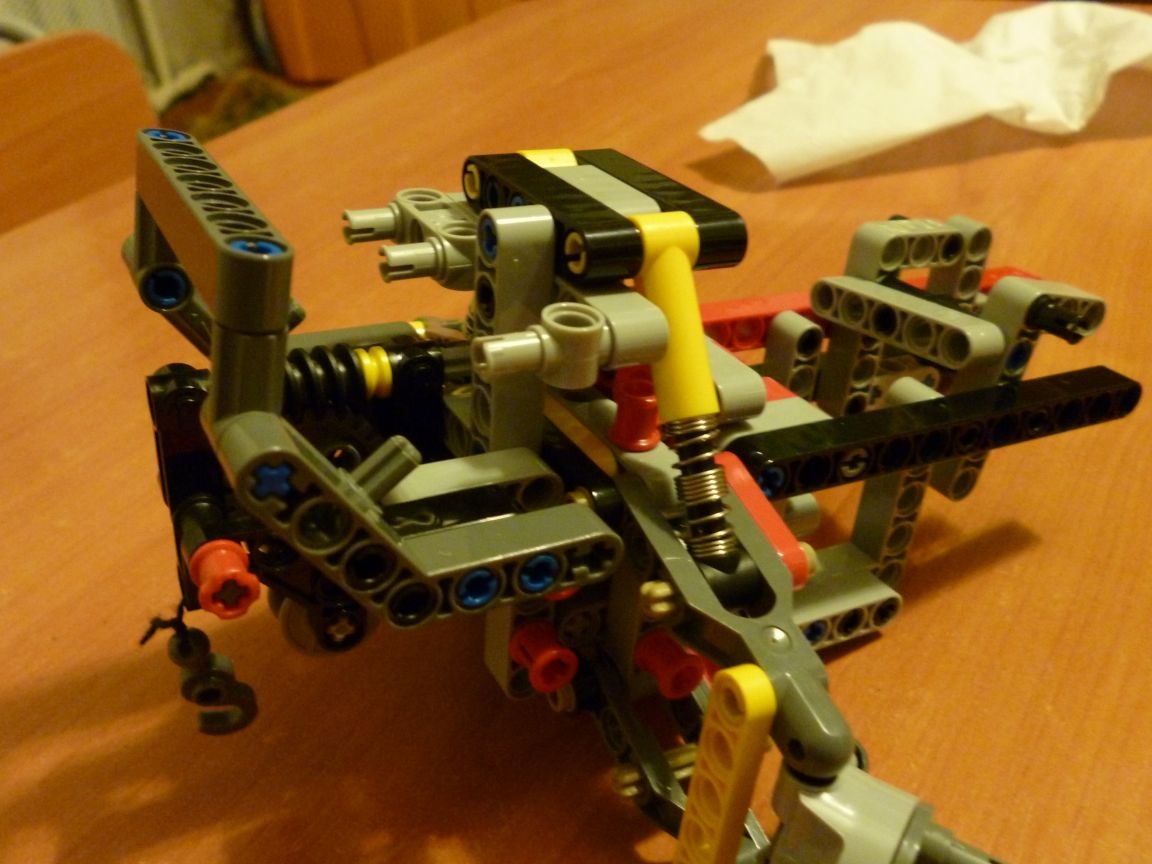
Instalujeme Arduino Nano a DRV 8833 na jejich místa:
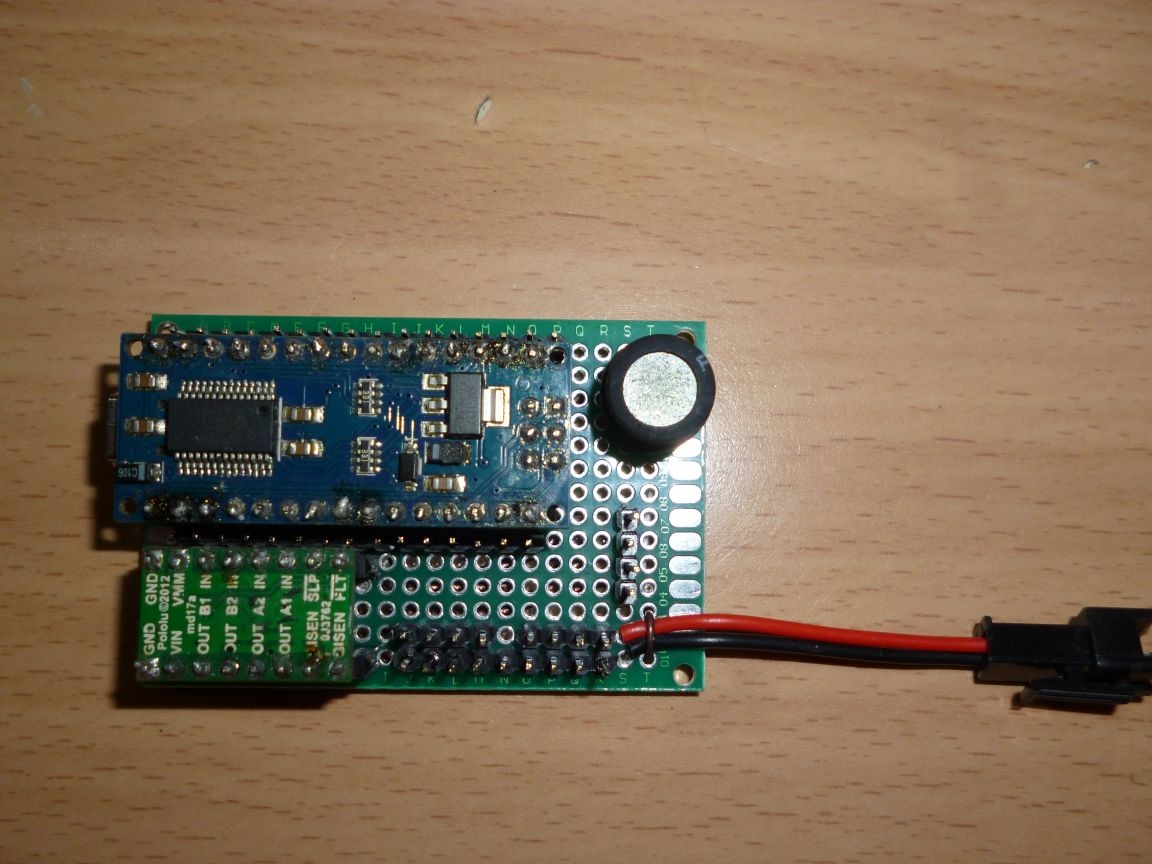
A položte desku na podvozek:
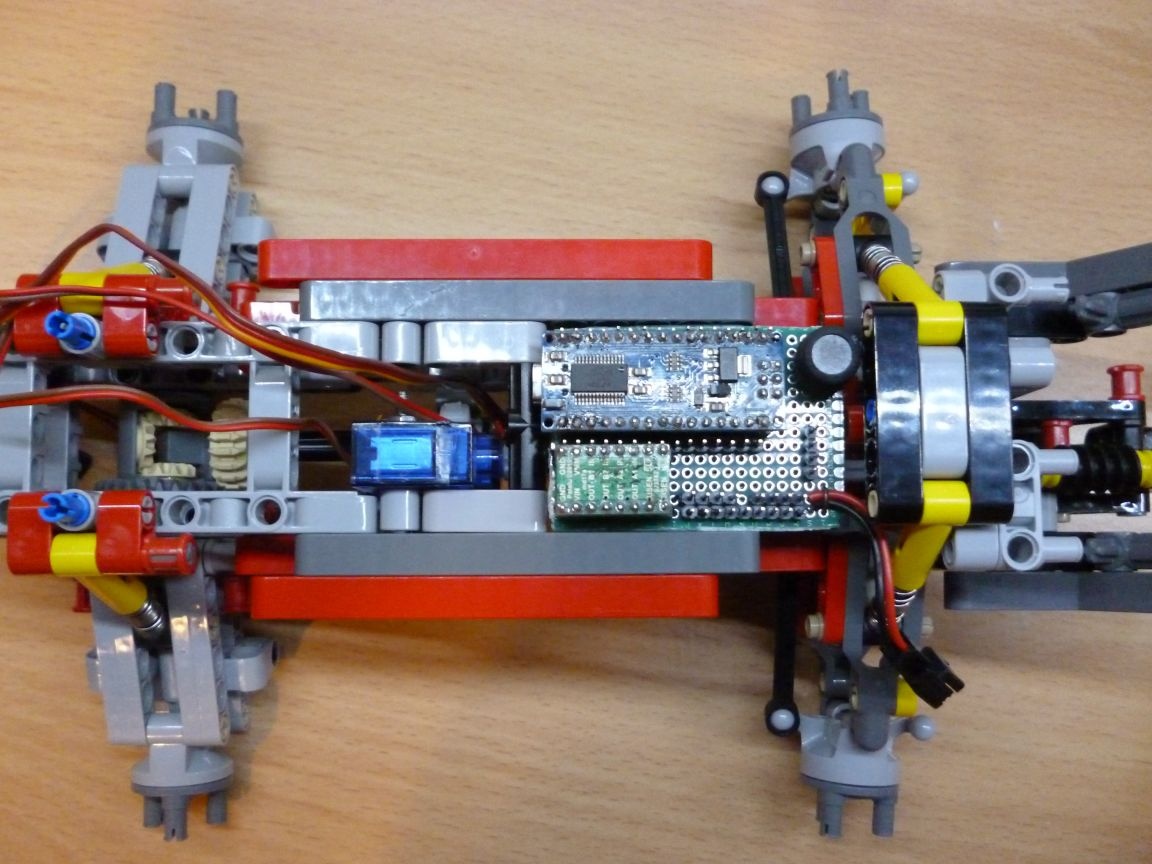
Napájení - 6 Ni-Mn 1,2 V 1000 mA baterií. Je nutné je pájet do série a navíjet je elektrickou páskou. Lepidlo na oboustrannou pásku v zadní části podvozku.
Spojujeme celou naši strukturu:
Krok 5 Kabina
Kabina je moje osobní improvizace, neexistují žádné připravené pokyny, takže je třeba sbírat z fotografií.



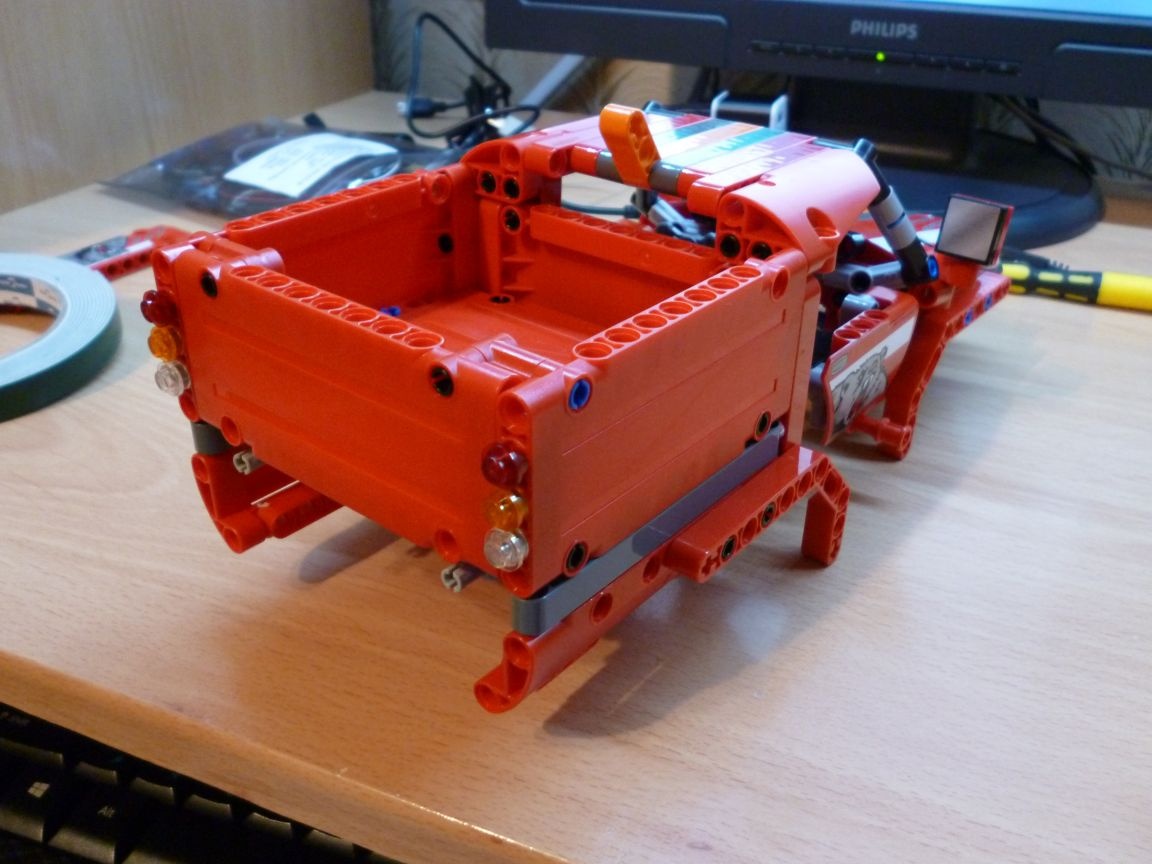
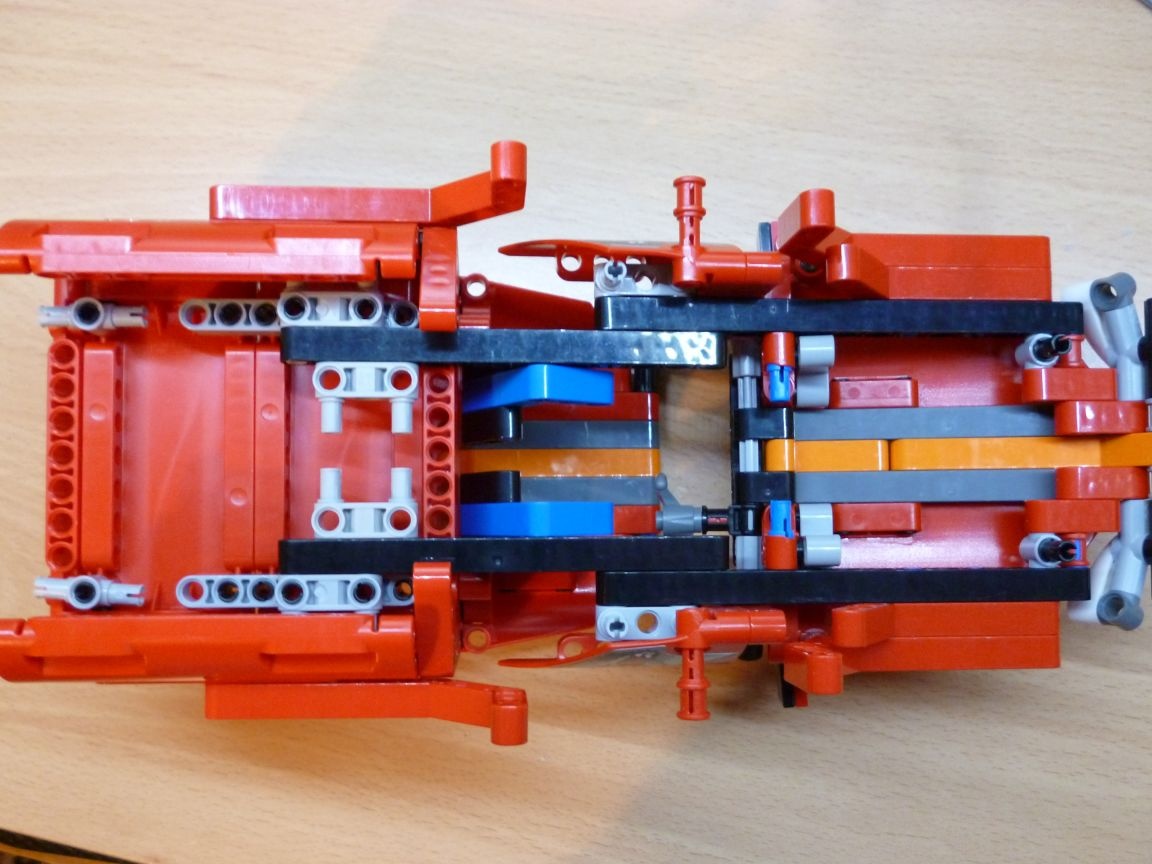
Můžete si sestavit vlastní verzi, stačí ji umístit pod podvozek. Hlavní věc je zde sladit montáž s podvozkem. Jsou čtyři a jsou jasně viditelné na fotografii ze spodní části kabiny.
Krok 6 firmware.
Dnes však, jako vždy, programuji v Arduino IDE. Nejprve musíte vyplnit můj firmware a prostřednictvím terminálu se podívat na kódy dálkového ovládání, které budete používat. Můžete si vzít jakékoli IR dálkové ovládání, například z televizoru, DVD přehrávače nebo sestavit vlastní (mám domácí dálkové ovládání z joysticku Sega). Stisknutím tlačítka uvidíme v terminálu kód stisknutého tlačítka a zapíšeme jej na kus papíru. Děláme to pomocí všech tlačítek, na kterých chceme akce naprogramovat. Dále upravte náčrt. Zapíšeme do něj naše kódy pro nezbytné akce a znovu to zablikáme. Tento firmware je nakonfigurován na mém dálkovém ovladači Sega. Při hraní se strojem jsem si všiml několika nuancí nebo nepříjemností. Je obtížné dosáhnout spolehlivého příjmu IR příkazů během pohybu. A stane se to takto: stiskněte šipku dopředu, stroj obdržel příkaz jít a spěchal dopředu, uvolnil šipku, ale neobdržel příkaz k zastavení, a pokračuje v jízdě, dokud nepadne nebo nezasekne, je plný poruch. Tento problém lze částečně vyřešit zvýšením počtu opakování odeslání příkazu, je to však možné pouze při použití dálkového ovladače sami. Ale já si vyberu kardinálnější řešení - přejdu na 433 MHz vysílač - přijímač. O tom budu psát v dalším článku.
Krok 7 nasaďte na kola.
Musíme tedy jen nasadit kabinu na podvozek, nasadit kola a zkontrolovat naše SUV v akci.

