

Článek se zaměří na příklad vytvoření legendárního robota zvaného „Canbot“. Většina podrobností o robotu je vytištěna na 3D tiskárně. Robot je ovládán na dálku.
Materiály a nástroje pro domácí:
- jeden mikroprocesor Atmel Attiny85;
- dvě mikroskopické služby HXT900 nebo jejich analogy;
- jedna 3,7 V LiPo baterie;
- jeden infračervený přijímač při 38 kHz;
- ultrazvukový převodník typu HC-SR04;
- místo toho 9x4mm spínač nebo propojka;
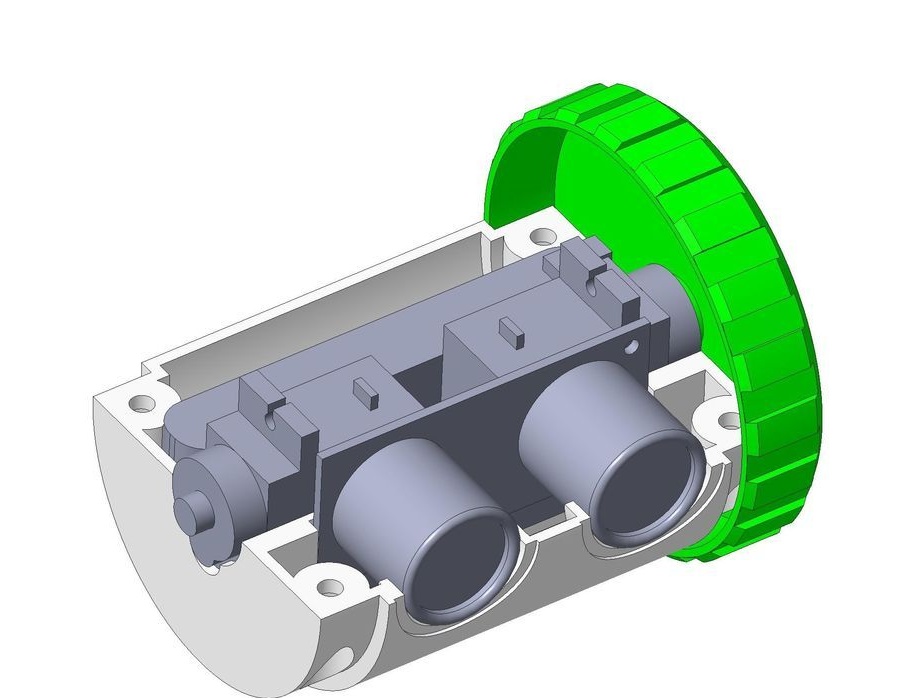
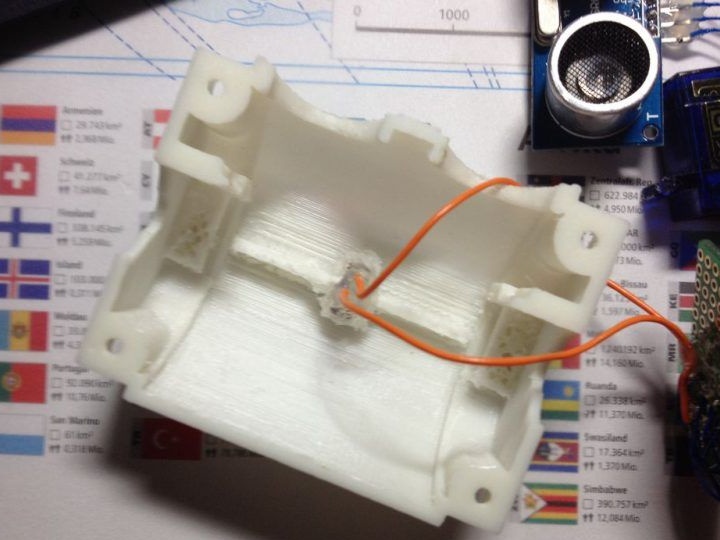
- 3D díly (možné). Bude to trvat jeden vrchol (top.stl), jedno dno (bottom.stl) a dvě kola (kolo.stl).
Samozřejmě budete potřebovat pájecí nástroje, horké lepidlo, šroubováky, šrouby, dráty a další drobnosti.

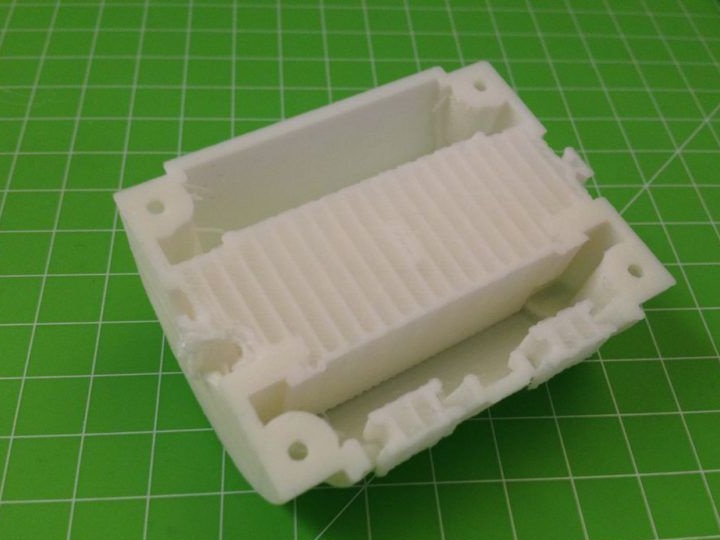
Horní a dolní část bude nutné vytisknout rovnou stranou dolů pomocí možnosti „nosné struktury“. V závislosti na tom, jaký typ tiskárny byl použit, může být nutné hotové díly na konci vyčistit.
Výrobní proces robota:
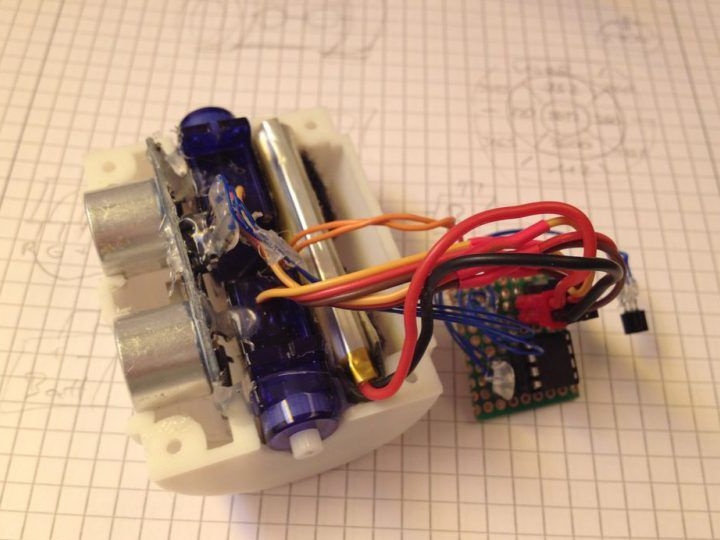
První krok. Elektronický část robota
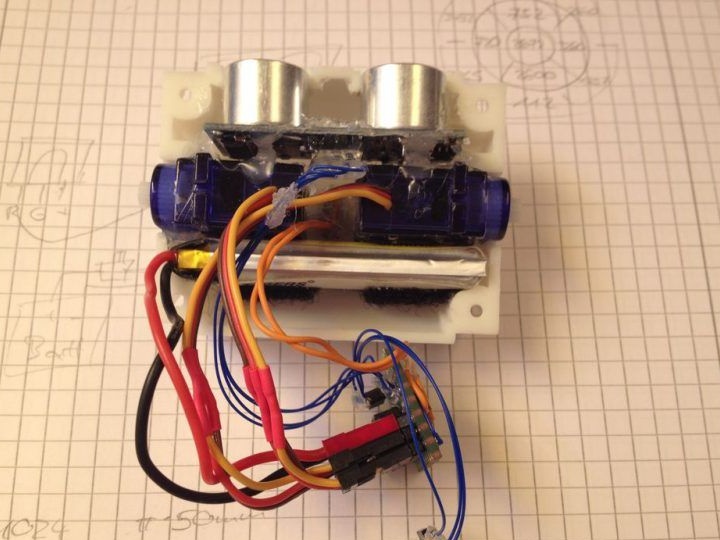
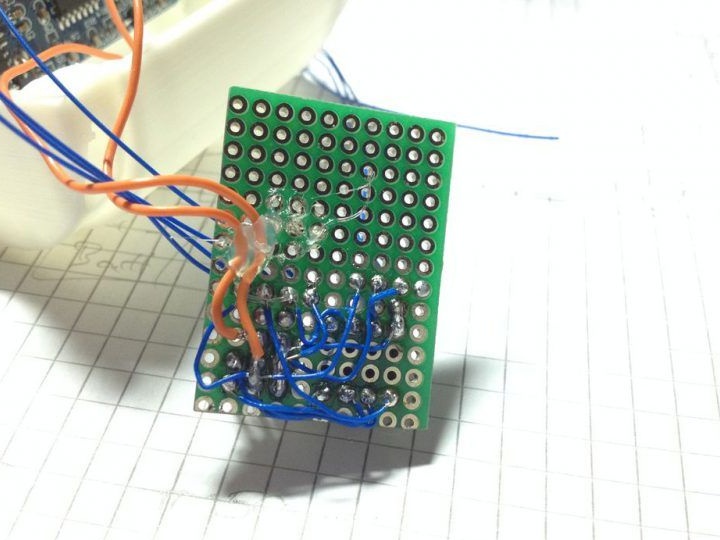
Nejprve musíte nakonfigurovat serva, musí být převedena na nepřetržitou rotaci. Jak na to, jsou na internetu spousty pokynů. Pak bude třeba všechny elektronické prvky sestavit tak, jak je uvedeno na obrázku. Chcete-li sestavit elektronickou část bylo pohodlné, můžete si vzít malý kousek prkénko, stejně jako tenké dráty.


Krok dva Softwarová část robota
Pokud přistupujete k procesu vytváření robota s nejvyšší profesionalitou, můžete softwarovou část psát samostatně. Ale za tímto účelem se budete muset naučit programovací jazyk. V jednodušší verzi si můžete stáhnout hotový kód a jednoduše ho nahrát do mikrokontroléru.
Podle autora to nejlepší robot přijímá infračervené signály z dálkových ovladačů značky Sony. V budoucnu bude nutné část kódu přeformátovat Arduino a výstup dat pomocí funkce Serial.print (). Díky tomu bude možné zjistit, jaké kódování je na každém tlačítku.
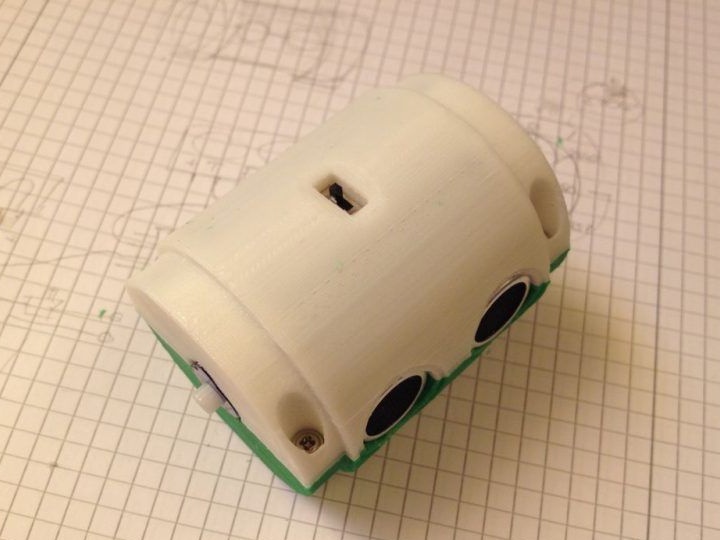
Krok tři Poslední fáze. Sestavte robota
Na závěr, robot jde. Pro tyto účely budete potřebovat horké lepidlo. S tím je třeba opravit dráty tak, aby se při pohybu robota nevyhnuly.Je také nutné spínač přepnout a ultrazvukový senzor dobře upevnit. Závěrem lze říci, že kryty robota jsou spojeny pomocí čtyř šroubů, takže v případě potřeby je lze snadno rozebrat. Mimochodem, šrouby pro serva jsou ideální pro montáž.

To je vše, nyní je robot téměř připraven. Zbývá nainstalovat kola na hřídele servomotoru a můžete zahájit testování robota. Můžete vidět podrobněji, jak domácí video funguje.