Během svého vzdělávání autor hrál na telefonu hry s podporou akcelerometru. Opravdu rád řídil auto po telefonu pouhým naklápěním, a pak začal snít o tom, že v reálném životě vyrobí auto se stejnou kontrolou. Nyní mám Arduino a poté, co získal programovací dovednosti, je na čase vytvořit v Androidu spravovaný stroj, který se jmenoval Hercules.
Toto jméno dostala kvůli velkému točivému momentu a vysoké rychlosti. Model lze ovládat pomocí telefonu Android přes Bluetooth. Jakýkoli telefon s tímto operačním systémem je vhodný pro ovládání, autor neomezuje jedno dálkové ovládání. Také jsem pomocí telefonu ušetřil peníze, protože jsem nemusel utrácet peníze za vytvoření dálkového ovladače.
Materiály a nářadí:
- Arduino Uno
- Bluetooth transceiver
- Dvoumotorový řidič (s L298 H-můstkem)
- Motory s převody 4 ks (výkon se volí v závislosti na použití stroje)
- Kola 4 ks
- Baterie 1Ah SLA 12V
- Základna pro komponenty (podvozek)
- prkénko
- Krabice pro bydlení 4 ks
- Přepínač SPST
- Připojovací dráty pro Arduino
- Pájecí dráty
- Matice a šrouby malé velikosti
- Rezistor 10 kOhm 1 ks
- Rezistor 20 kOhm 1 ks
- Android telefon
- páječka
- pájka
- pájecí pasta
- vrták





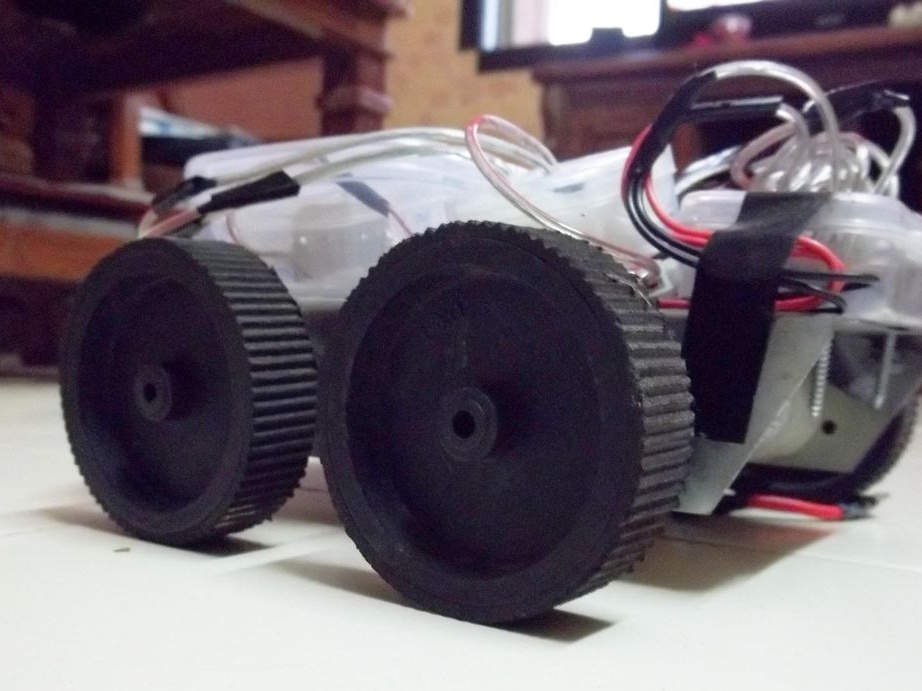
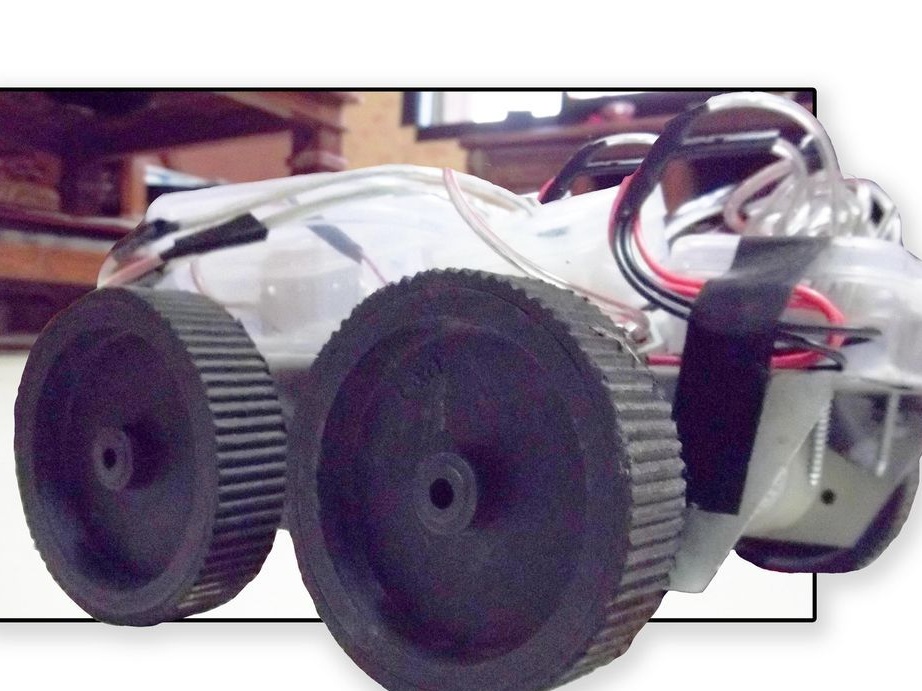
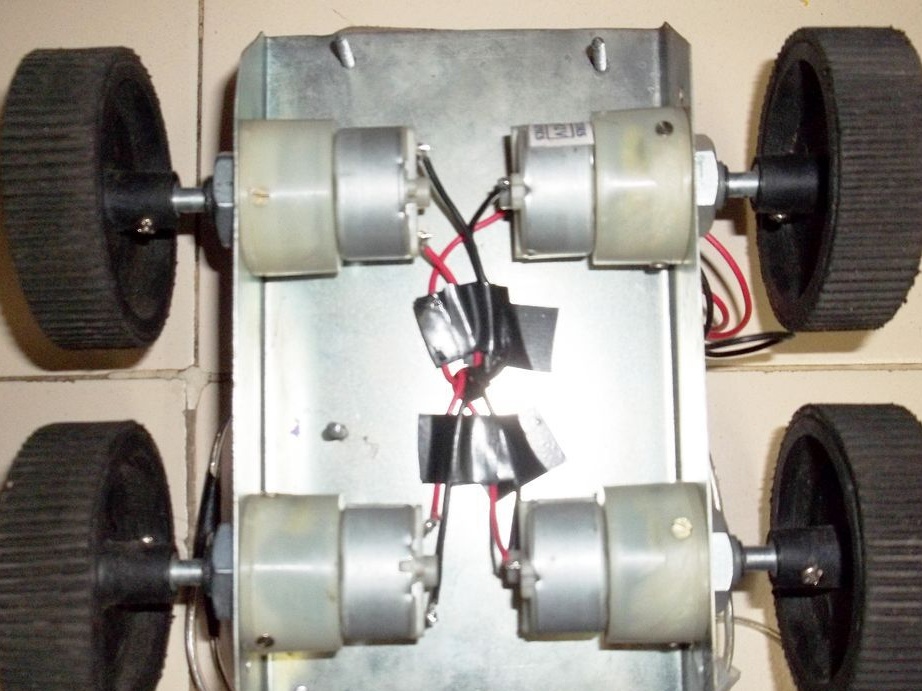
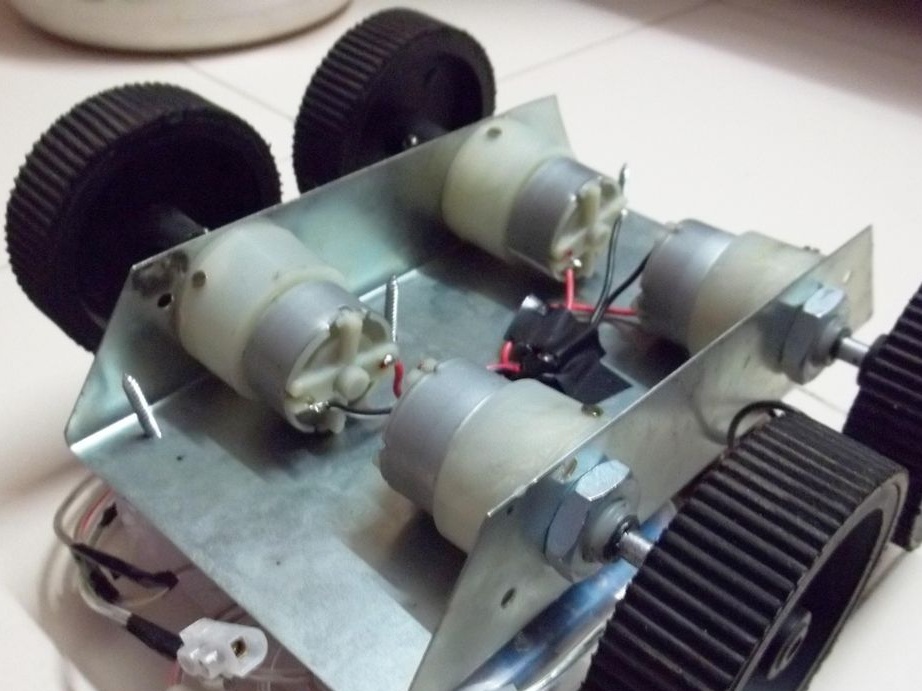
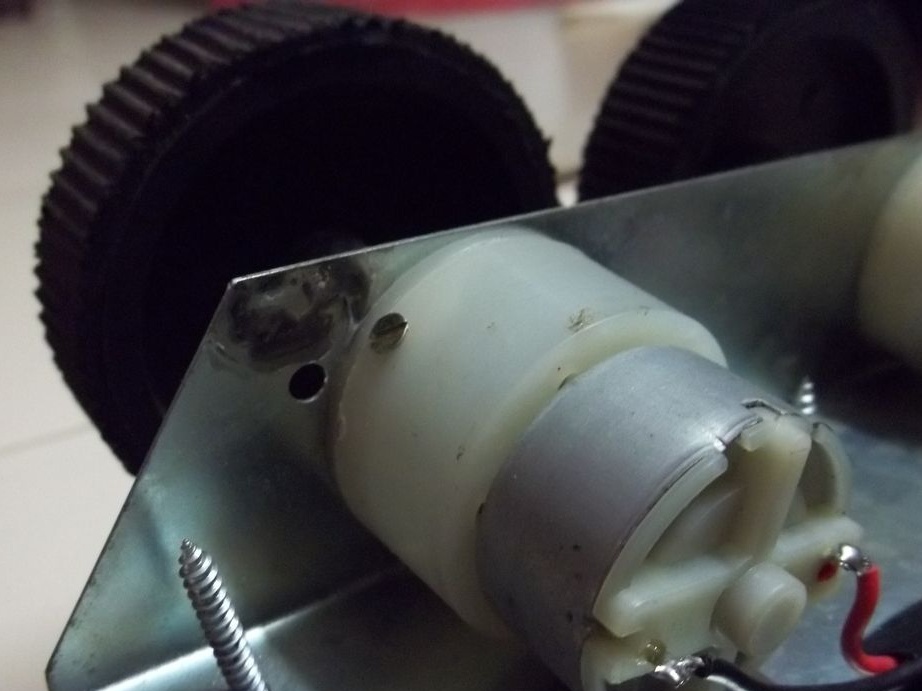
První krok. Kola a podvozek.
Šrouby motoru usnadnily jejich instalaci na podvozek pomocí matic. Kola jsou namontována až k hřídeli motoru. Dva pravé motory se zapínají paralelně navzájem, stejně jako dva levé motory. Jak vypadá podvozek po instalaci čtyř kol a motorů, můžete vidět na fotografii níže.
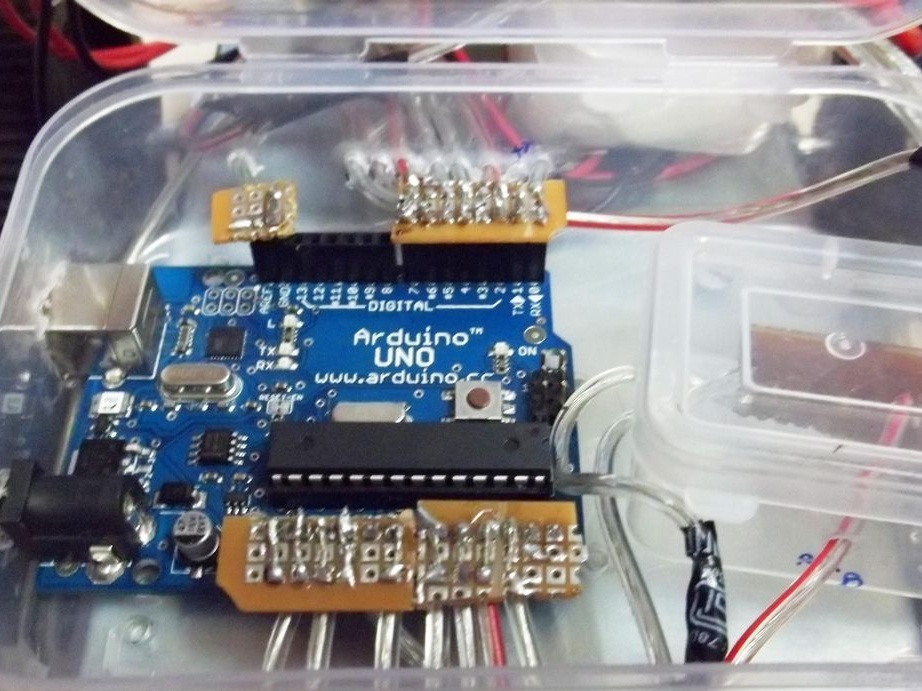
Krok dva Bydlení pro Arduino.
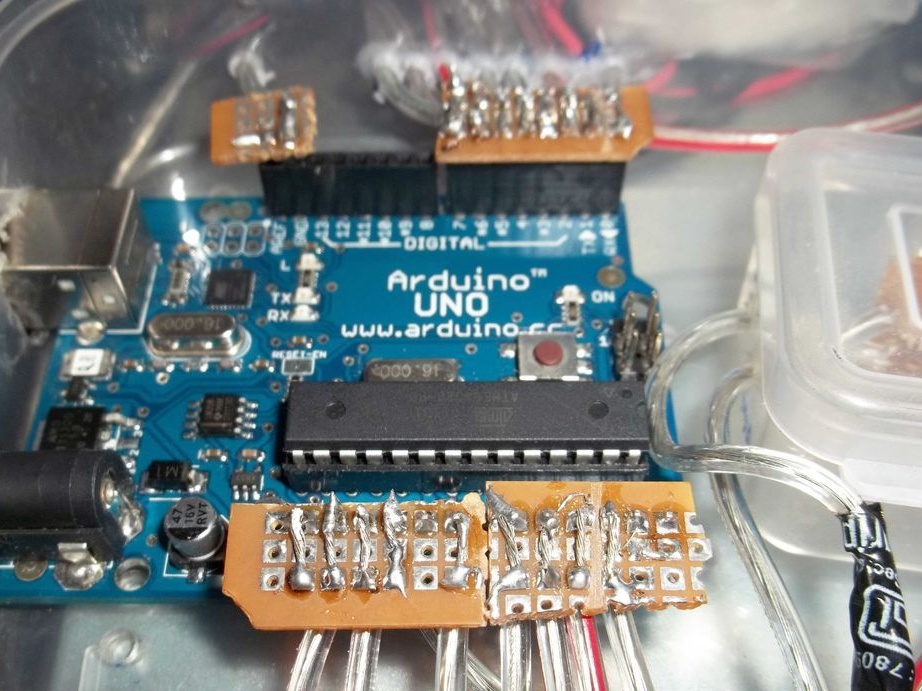
Schéma případu pro Arduino je rozdělena do několika částí. Takové modulární konstrukční řešení pomůže v budoucnosti k podpoře obvodu nebo k odstranění možné poruchy. Pokud se některá ze součástí rozpadne nebo vyhoří, může být rychle vyměněna a bez porušení konstrukce. Box pro Arduino byl vytvořen takto:
- Čtyři části byly vyříznuty z prkénku, dvě z nich s otvory 8x3, druhá dvě části 6x3.
- Kolíky BLS byly připájeny ke každé desce na dlouhé straně.
- Každý špendlík na prkénku byl dodatečně pájen s dráty asi 10 cm dlouhými. Bylo to provedeno tak, aby dráty nevyšly z Arduina, protože nyní se zatížení začalo rovnoměrně rozdělovat.
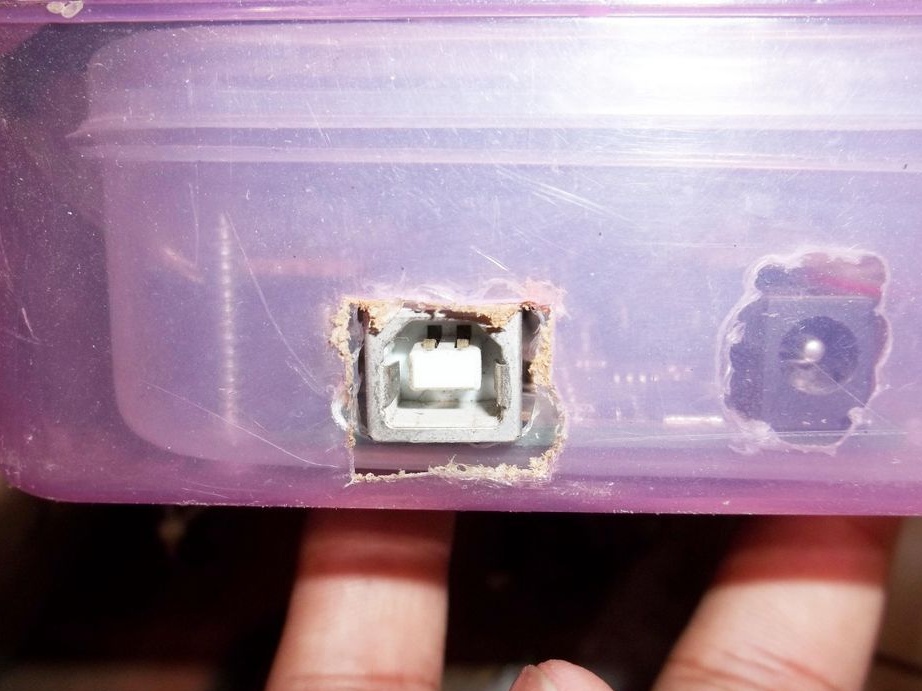
- Poté byla do krabice umístěna deska Arduino tak, aby se výstup USB dotýkal zdi. Pro tento výstup byla vyříznuta díra, což pomůže načíst další programy do stroje nebo provést opravy stávajících. Po stranách krabice byly vyříznuty otvory pro dráty, které by vycházely z desky. Další otvory byly vyříznuty ve spodní části krabice pod připojovacími konektory Arduino.


Krok tři Vysílač Bluetooth.
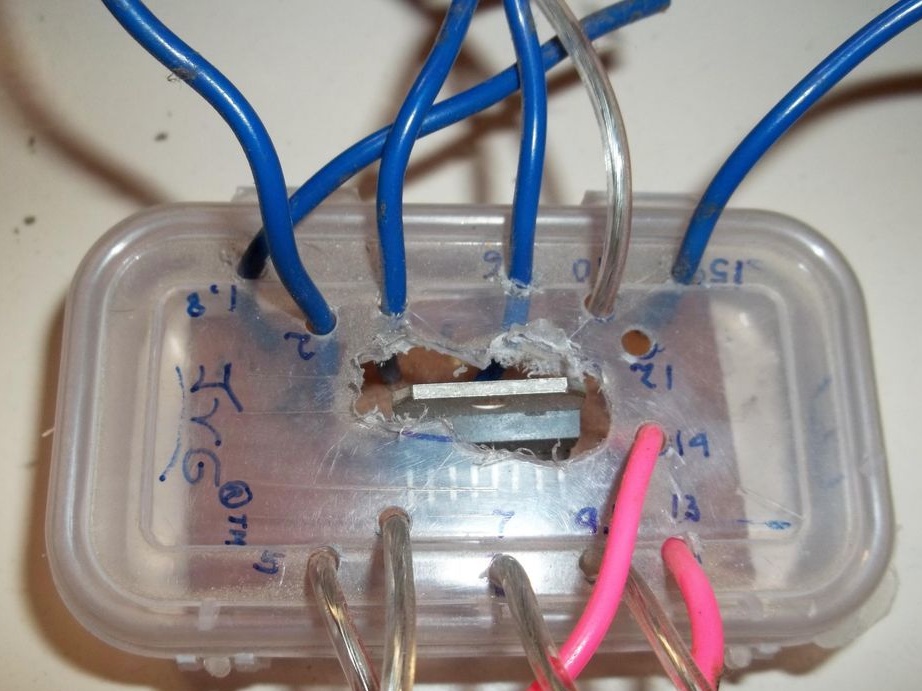
Pájení vodičů k Bluetooth transceiveru je při sestavování tohoto projektu nejobtížnějším úkolem, autor při pájení opravdu postrádal třetí ruku. Byly použity čtyři vodiče dlouhé 10 cm, které byly pájeny na piny 1 (Tx), 2 (Rx), 12 (+ 3,3 B) a 13 (GND). Nyní mohl být vysílač a přijímač umístěn v krytu s předem připravenými otvory pro dráty. Autor nalepil dráty na krabici, aby zabránil odtržení vodičů od kontaktů.



Čtvrtý krok. Pouzdro pro rezistory.
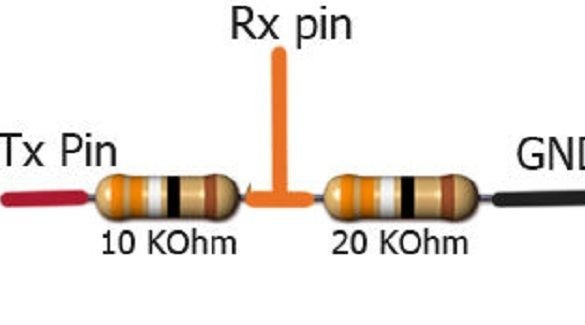
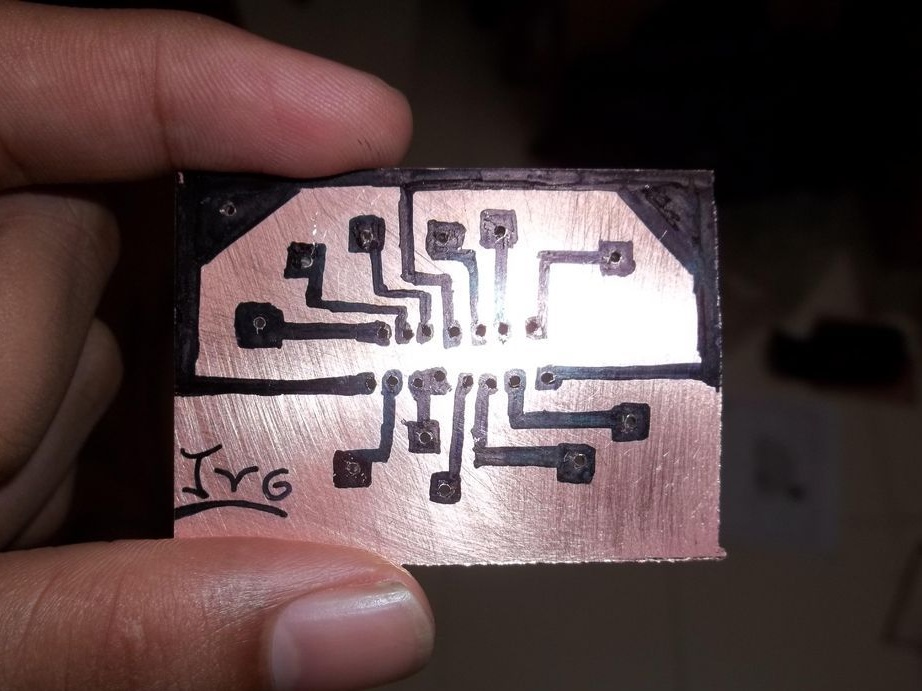
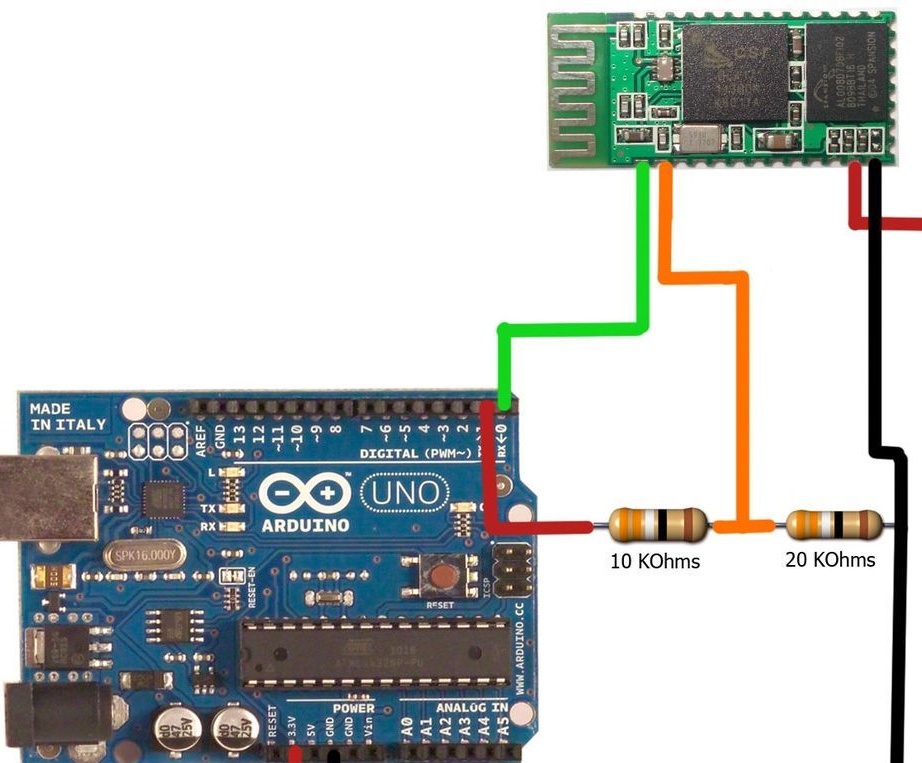
Vzhledem k tomu, že výstup Arduino Tx vysílá signál s napětím 5 V a modul Bluetooth pracuje s napětím 3,3 V, bylo nutné převést 5 V na 3,3 V. Pro tento úkol autor použil dělič napětí. Podle obvodu uvedeného níže připájel rezistor na zbývající část prkénku. Samozřejmě bylo možné tento obvod umístit do případu Arduino, ale nebylo tam dost místa, takže autor vytvořil samostatný rezistor.


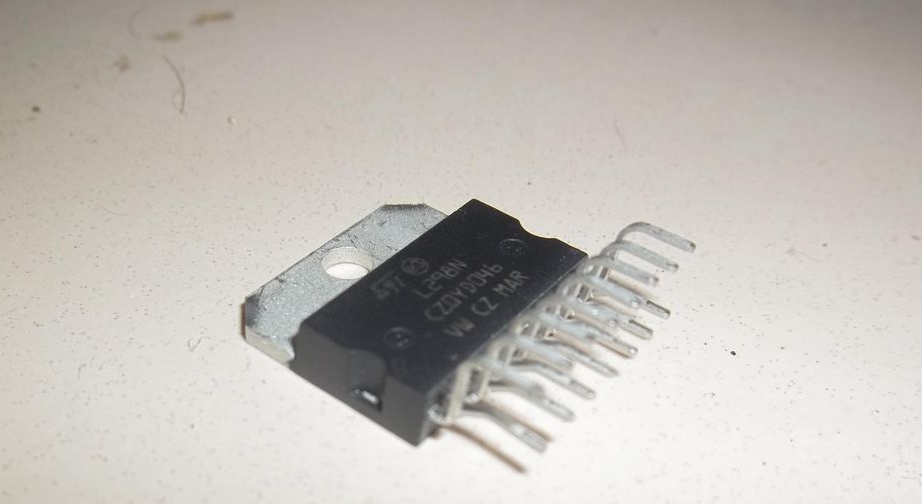
Krok pět Řidič motoru.
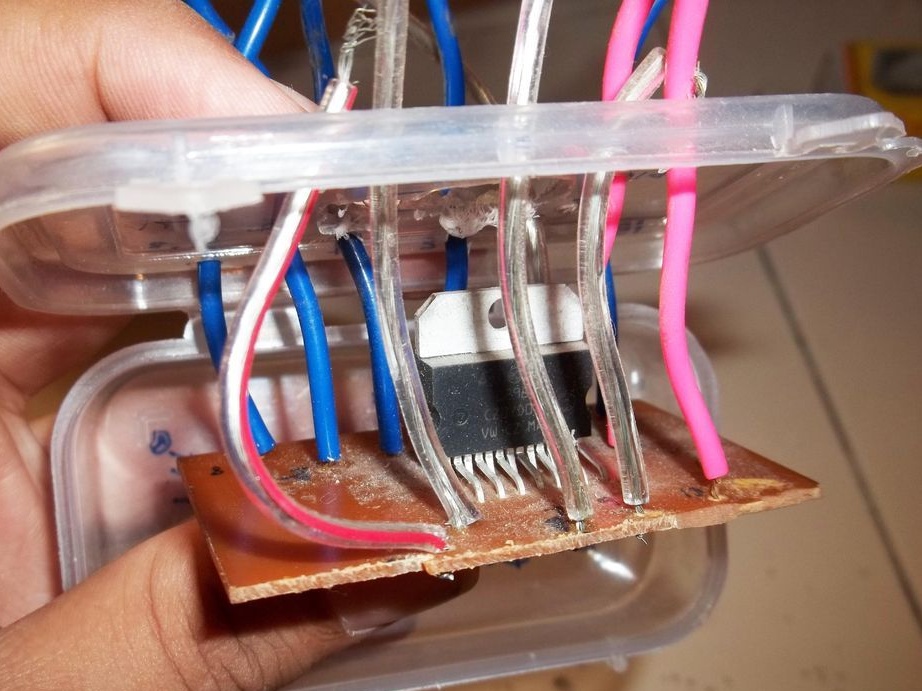
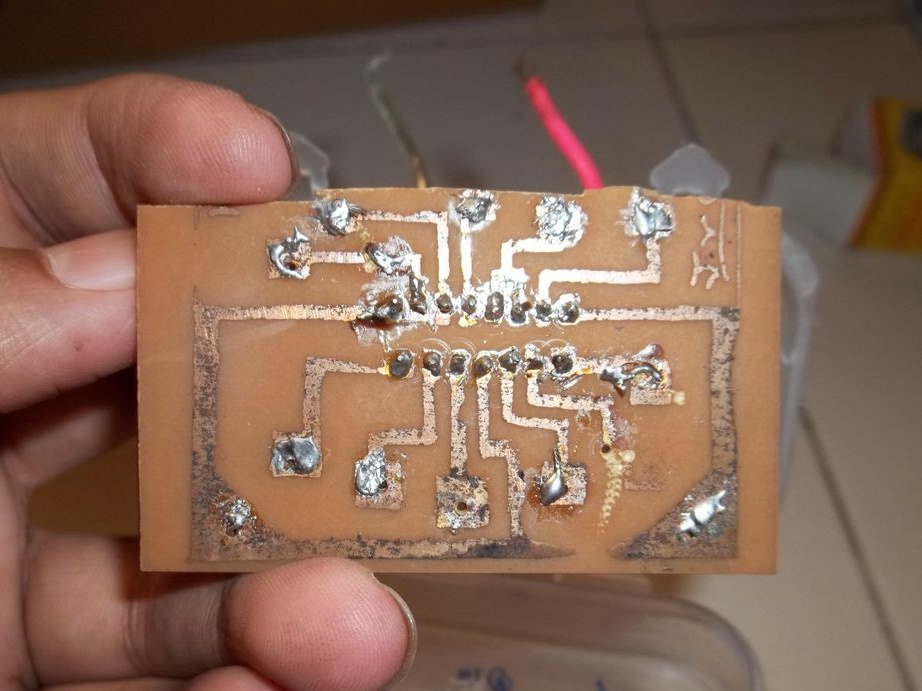
Autor používá duální ovladač s H-můstkem L298 IC, řídí čtyři motory. Autor pro něj vytvořil desku, která mu usnadní pájecí dráty, samotnou desku na fotografii níže. Po pájení byl řidič také umístěn v samostatném pouzdře s otvory pro dráty.
Krok šestý Konečná montáž.
Každá jednotlivá komponenta je připojena k Arduino v souladu se schématem.
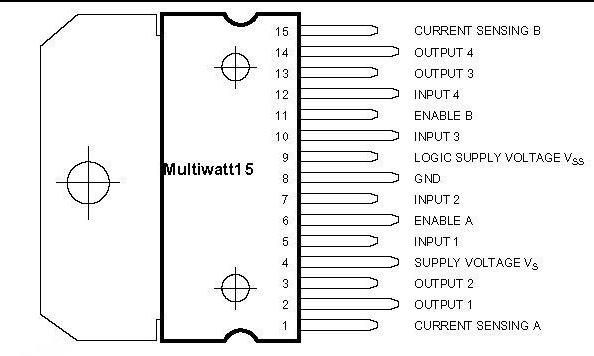
Spojení strojvedoucího s Arduino proběhlo podle tohoto pinoutu:
1 GND
2 k prvnímu kontaktu levých motorů
3 na druhý kontakt levých motorů
4 až 12V baterie
5 na pin Arduino 2
6 na čep Arduino 3
7 na pin Arduino 4
8 na GND
9 až 5V s Arduino
10 pro připnutí Arduino 5
11 na pin Arduino 6
12 na čep Arduino 7
13 k prvnímu kontaktu správných motorů
14 na druhý kontakt správných motorů
15 až GND
Napájení 12V bylo připojeno k vývodu Vin Arduino a ke kolíku 4 L298. GND Arduino resp. Napájení GND.
Sedmý krok. Program pro Arduino.
Aby program fungoval správně, bylo nutné nainstalovat knihovnu Amarino, kterou lze stáhnout. Zdrojový kód pro Arduino si můžete stáhnout v článku.
Krok osm. Software pro Android
Amarino Library je sada nástrojů pro práci s chytrými telefony Android. Nainstalováním další aplikace do telefonu můžete začít psát program.
Amarino aplikaci a plugin si můžete stáhnout z. Po instalaci do telefonu zůstalo pouze zařízení zapnout a připojit se k němu a vyberte sekci Přidat události-> Akcelerometr.
Video s instalací Amarino a jeho pluginů:
Rychlost stroje se rovná náklonu telefonu. Pokud se stroj pohybuje nesprávným směrem, musíte vyměnit dráty z motorů.