


Materiály a nástroje pro montáž:
- otočný ovladač;
- intel Edison s Arduino Breakout Board
- ovladač I2C PWM;
- úder hodin v reálném čase;
- mini I2C OLED;
- dvě serva;
- Tři serva s kovovými převody;
- dva dráty pro servopohon dlouhý 30 cm;
- montážní zásuvka pro zástrčku;
- dvojpolohový přepínač;
- kartáček a zubní pasta;
- napájení 5V 3A;
- plastová stříkačka;
- matice a šrouby;
- matice a závitová tyč;
- kus průhledného akrylu o rozměrech 61 cm x 61 cm x 3 mm;
- překližka o rozměrech 91 cm x 61 cm x 6 mm;
- 3D tiskárna.
Proces montáže robota:
První krok. Mechanická část
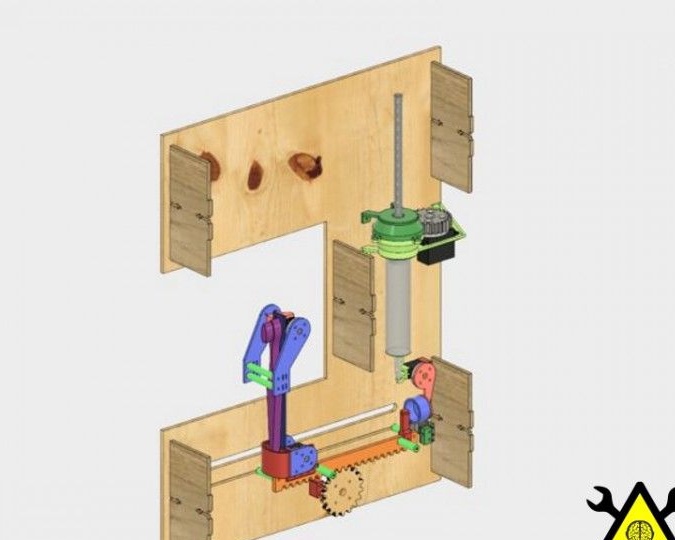
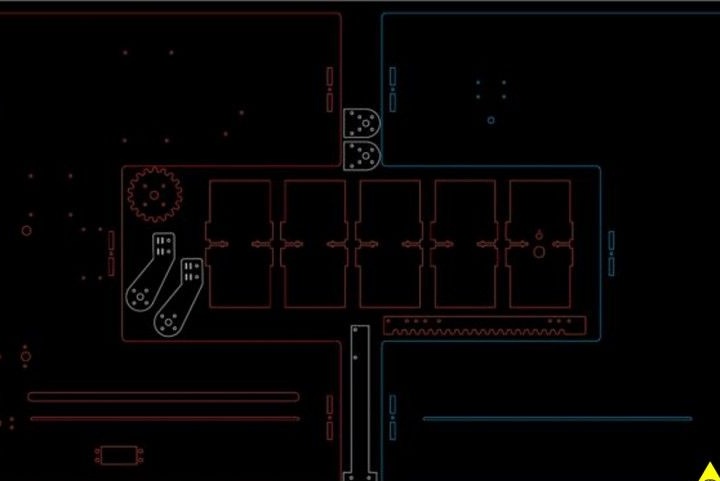
Zařízení bylo poprvé modelováno pomocí kombinace Fusion 360 a Illustrator. Tímto postupem byla vytvořena celá technologie, která zahrnuje 3D tisk a laserové řezání kovů. Celkově lze systém rozdělit do čtyř hlavních uzlů. To zahrnuje vozík, držák zubního kartáčku, hlavní tělo a dávkovač.
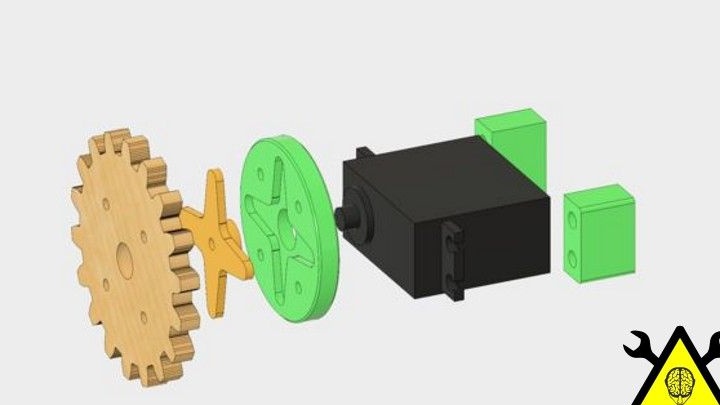
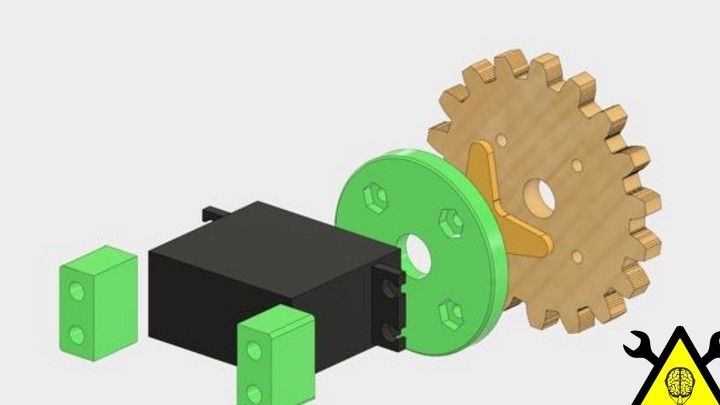
Aby mohly být domácí výrobky použity pro širší potřeby, bylo rozhodnuto modelovat adaptéry pro standardní a mikros serva. Tyto adaptéry mají štěrbiny pro připojení standardních hřídelí a také prostor pro čtyři matice na zadní straně. Vzhledem k tomu, že adaptéry byly navrženy pro hřídele, musí být připevněny buď k talířům, nebo k jiným objektům.

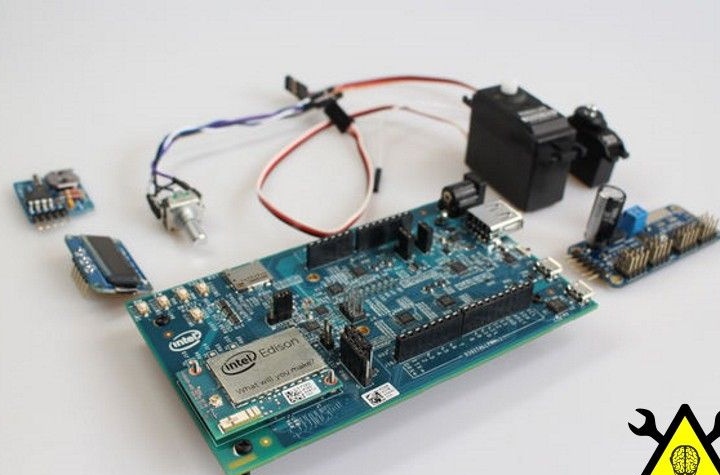
Krok dva Elektrický obvod zařízení
Jako napájecí zdroj se používá zdroj 5V a 3A. To stačí k pohonu jednoho motoru. Pokud jde o základní desku, spotřebuje asi 500 mA a motorové pohony, původní LED a hodiny reálného času spotřebovávají malé množství proudu.
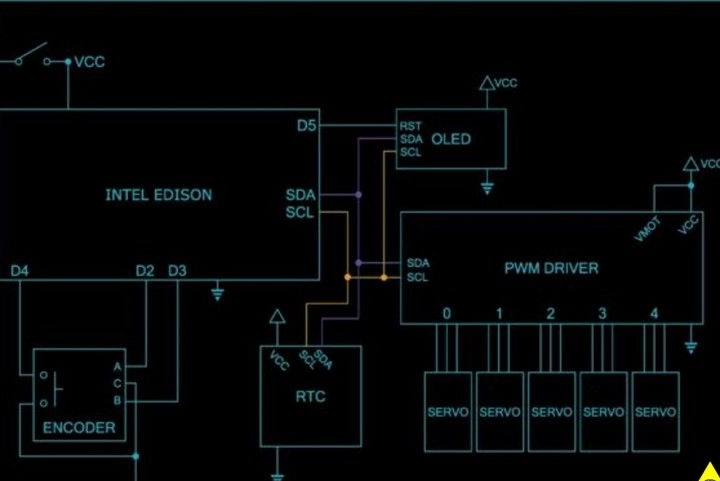
Procesor Intel Edison se používá jako hlavní řadič systému. Díky oddělení desek může procesor snadno komunikovat s dalšími komponenty elektroniky. Deska se připojuje k motoru, hodinám a obrazovce.
K ovládání pěti serv se používá deska PWM. Výkon motorů lze ovládat pomocí externího zdroje, ale autor se rozhodl uvázat Vmot s pinem VCC.Díky tomu je celý systém napájen 5V.
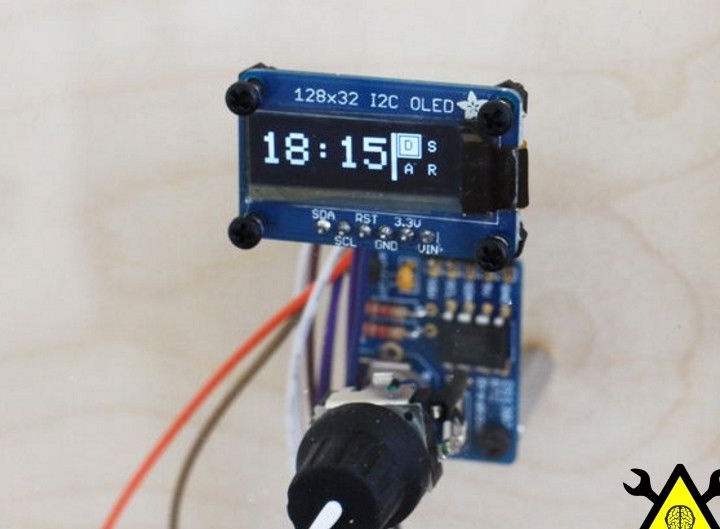
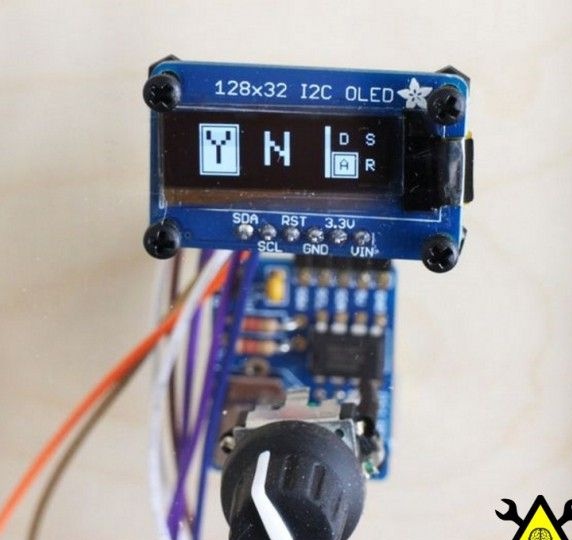
Aby bylo možné zařízení ovládat, používá se malý displej o velikosti 128 x 32. Hlavním vstupem uživatele je otočný senzor. Výstupy senzoru jsou připojeny k digitálním kontaktům procesoru.
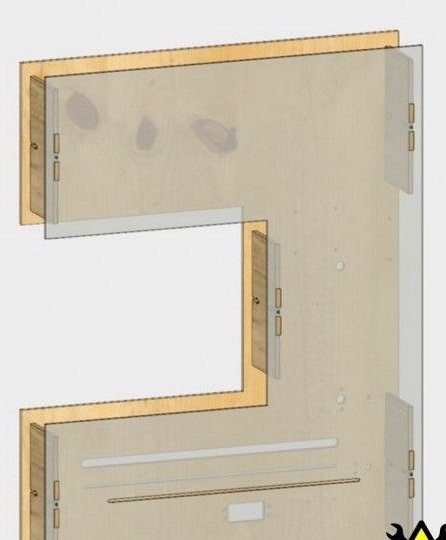
Krok tři Montáž těla
Zadní část slouží jako podpěra pouzdra, je vyrobena z překližky o tloušťce 6 mm. K zajištění PWM a procesoru se používají čtyři šrouby. Edison je namontován na přední straně a PWM na zadní straně.
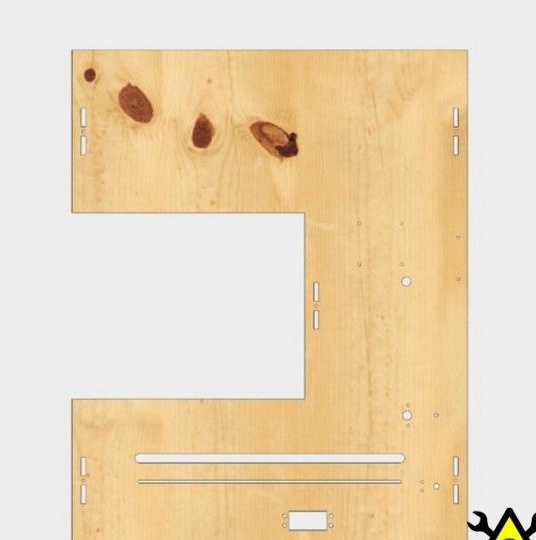
Pět distančních desek se používá pro připojení předního a zadního panelu. Distanční sloupky se k deskám připevňují šrouby a vhodnými maticemi. Desky jsou téměř symetrické, ale výstupky na jedné hraně jsou kratší, neroztahují se dopředu. Spínač je spolu s napájecím konektorem připojen k spodní vzpěře.

Pokud jde o čelní panel, je to nutné zejména pro ochranu zařízení během provozu. K zajištění obrazovky se používají čtyři šrouby, otočný senzor je také připevněn maticemi.
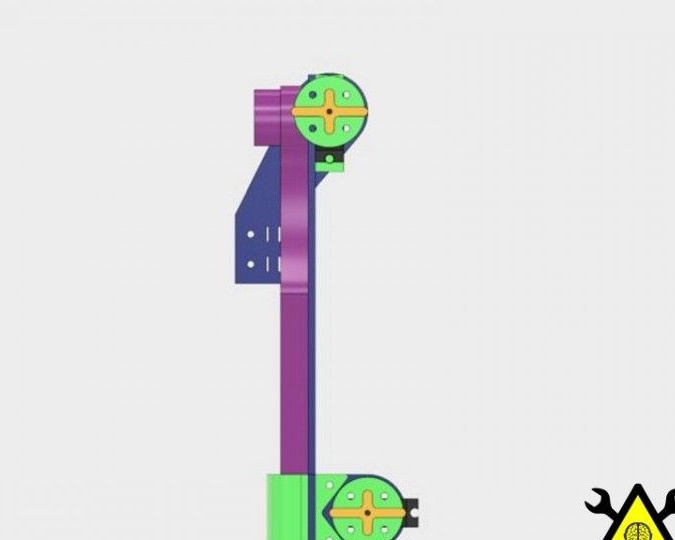
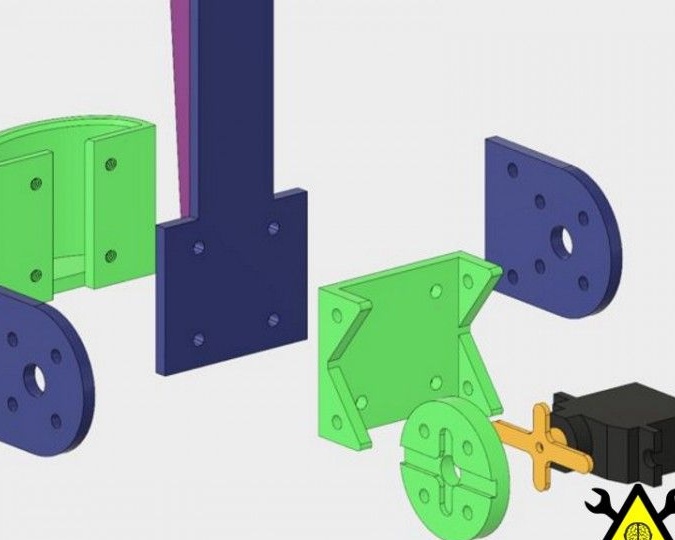
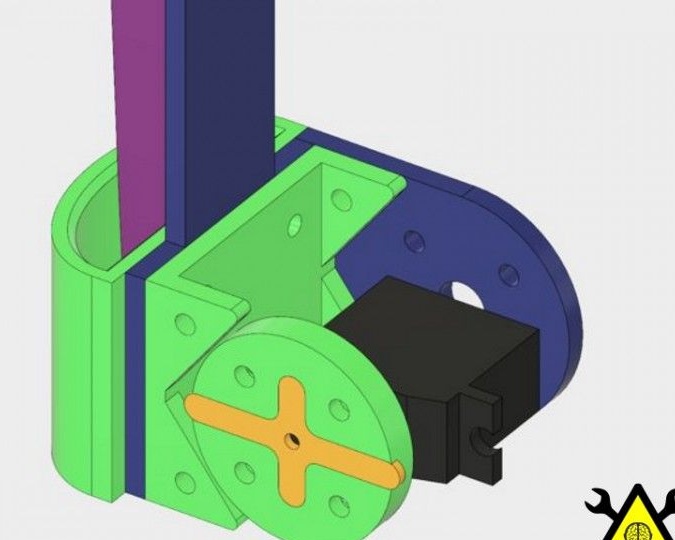
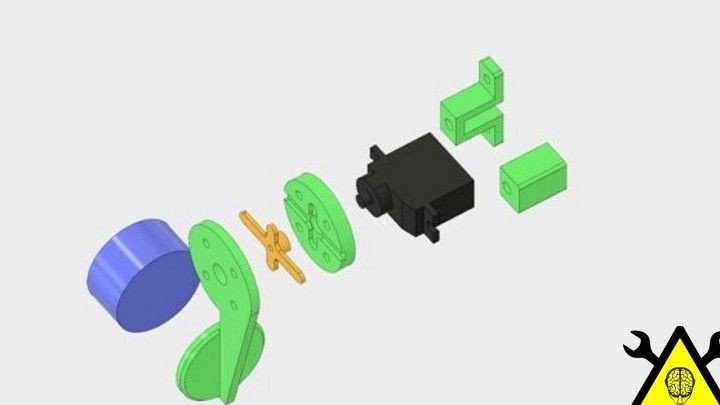
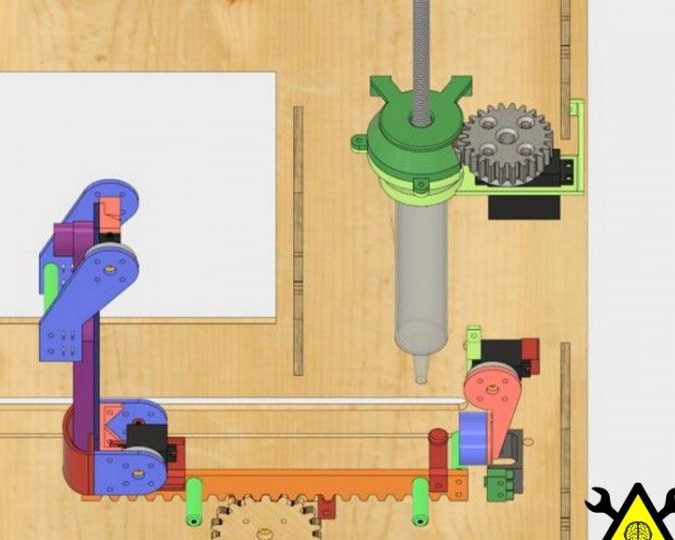
Krok čtyři Držák na zubní kartáček
Na držáku zubního kartáčku jsou dvě sera, která jsou poháněna komponenty - základnou a „hlavou“. Na obrázku můžete vidět prvky modré a zelené. To, co bylo nařezáno laserovou řezačkou, je zbarveno modře a prvky vytištěné na 3D tiskárně jsou zbarveny zeleně.

Díky hlavě zubní kartáček neklesne. Ruce jsou poháněny jediným servopohonem, jsou upevněny dvěma těsněními. Pro připojení servomotoru k hlavní desce se používá 3D adaptér a dva šrouby. V desce jsou čtyři štěrbiny, skrze ně pomocí černých gumových pásek je připevněna zubní kartáček.
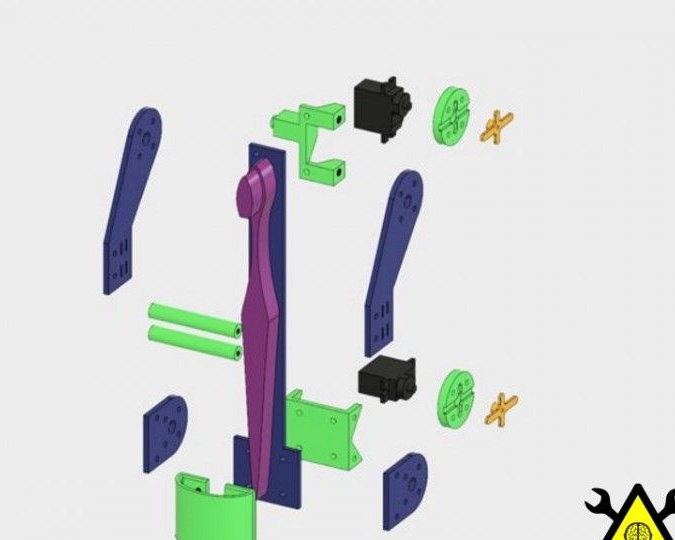
Základem je malý 3D hrnek, který zabraňuje pádu štětce. Po vložení zubního kartáčku do sestavy jej servopohon drží a otočí dolů. K připojení desek se používá osm šroubů.


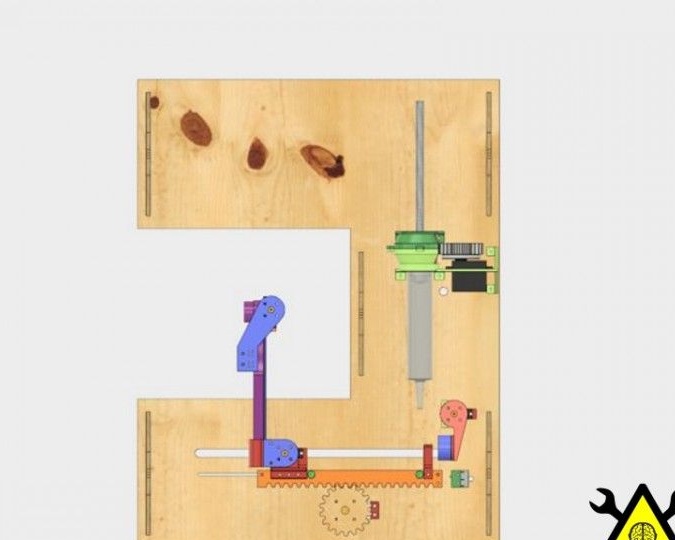
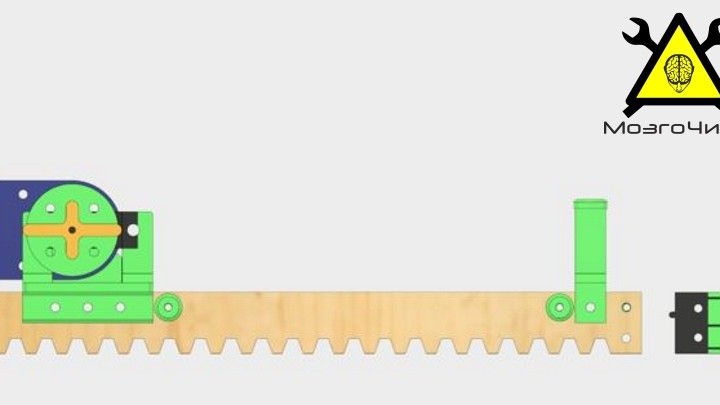
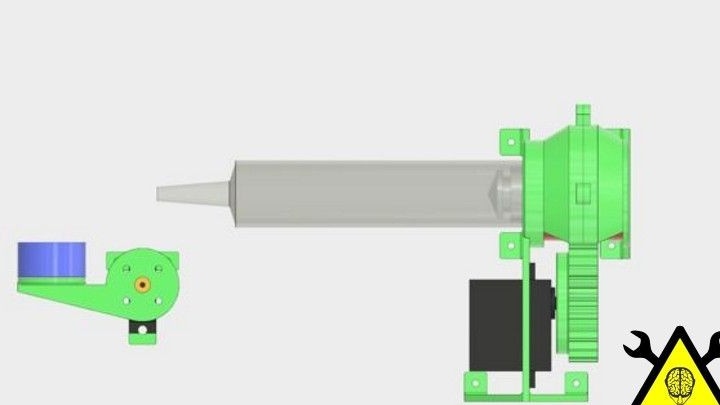
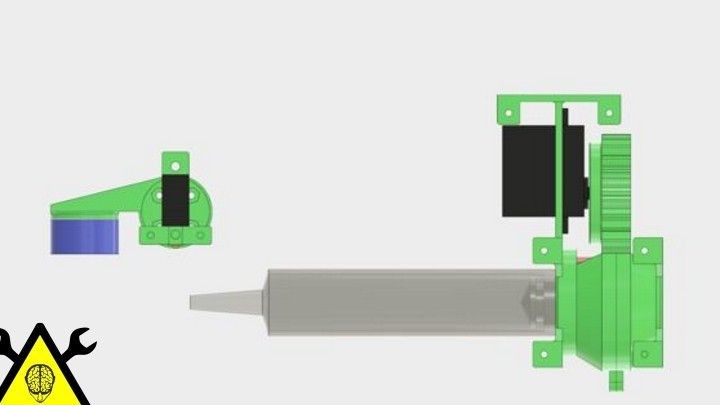
Krok pět Montáž na lištu
Rám se skládá ze tří jedinečných částí, jedná se o opěrku hlavy, podvozek a vzpěry. Pomocí vozíku je držák rámu připevněn. Samotný vozík je připevněn třemi šrouby. Opěrka hlavy je potřebná, aby se snížilo zatížení hlavního držáku serva, je namontována dále na podvozek na rámu.
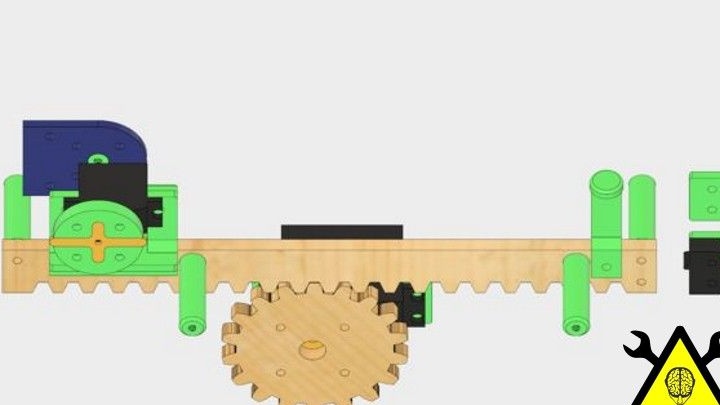
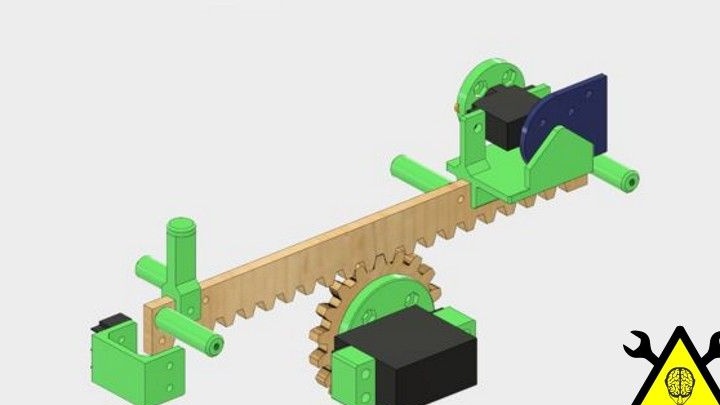
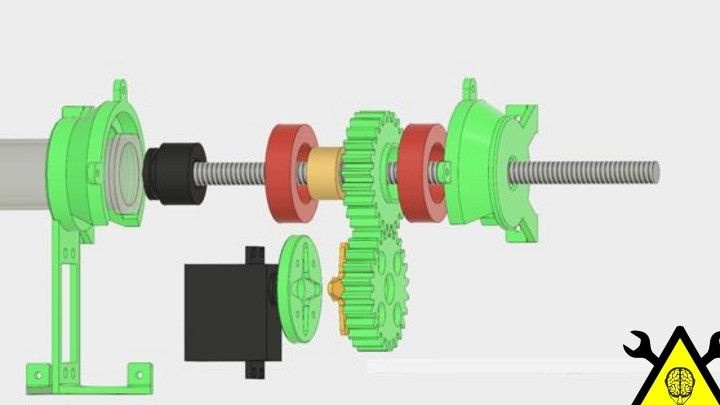
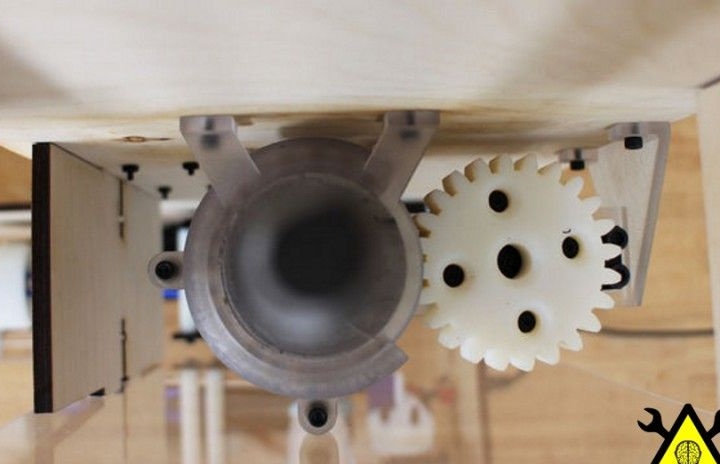
Převodovka je namontována pod rámem. Vyřízne se z překližky o tloušťce 6 mm a připevní se na standardní hřídel servo. Samotný servopohon je umístěn mírně přesazen od základní desky, v souvislosti s tím jsou na něm identické pravoúhlé vzpěry. Samo servo je k základně připevněno pomocí čtyř šroubů.
Krok šestý Montáž dávkovače
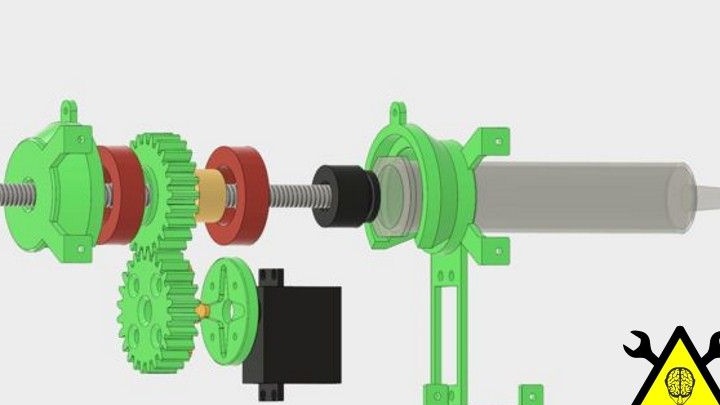
Nejsložitějším mechanismem v zařízení je lineární pohon. Díky němu dochází k dávkování pasty. Jádrem zařízení je závitová tyč a matice, pomocí které je trubka stlačena. K zajištění jednotky se používá šest šroubů.
Sedmý krok. Software
Celkově má program tři funkce: nastavení času, nastavení „alarmu“ a také funkci spuštění zařízení.
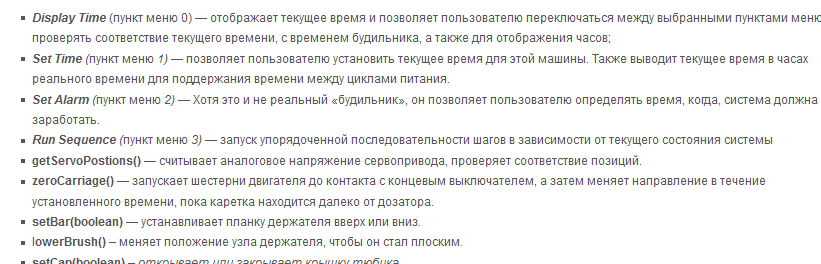
To je vše, po blikání a konfiguraci je zařízení připraveno k použití.