

Robot Kutilství bude pro děti skvělou hračkou, také s ní můžete hrát příbuzné nebo přátele. Podstata robota je následující. Jedná se o krabici se spínačem. Jakmile někdo klikne na spínač na krabici, začnou se otevírat dveře, ze kterých ruka vychází a přepne spínač do původního stavu. Přes vnější jednoduchost robota to ve skutečnosti vypadá docela vtipně.
Základem pro vytvoření robota je obvod Arduino. Tam jsou také některé mechanické prvky, které budou diskutovány níže. Podívejme se podrobněji, jak na to udělej to sám sestavit takového robota.
Materiály a nástroje pro výrobu:
- Arduino deska, cokoli s výstupy PWM;
- servomotory, dva kusy (vhodné model Futaba - S3003, výkon takového motoru stačí k otevření dveří, zařízení produkuje až 3,2 kg / cm výkonu);
- baterie;
- přepínač typu SPST nebo SPTT;
- spínač pro řízení energie baterie;
- pro restartování Arduina potřebujete tlačítko;
- dráty, propojky a další drobnosti.

Kromě toho budete také potřebovat převodovku (vhodnou pro automobily s rádiem řízeným ovládáním), desku pro elektromotor zvanou motorový štít Arduino, RC servo motor. Tyto komponenty jsou nutné, aby se box pohyboval, jako autor.
Ke snížení hladiny hluku během provozu zařízení je zapotřebí kondenzátor elektrolytického typu s nominální hodnotou 10 mF, odpor 10 K a měnič 74HC04.
Výrobní proces robota:
První krok. Jak vyrobit krabici
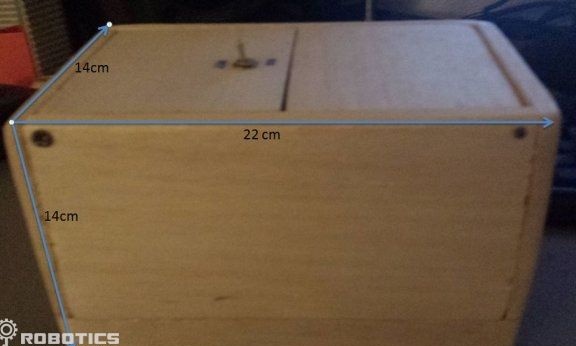
Chcete-li vytvořit krabici, tj. Tělo robota, musíte najít překližku nebo korek. K lepení dřeva navíc potřebujete silné lepidlo. Je důležité pochopit, že čím více struktura váží, tím více energie bude spotřebováno. Pokud jde o velikost krabice, je 22 cm x 14 cm x 14 cm.
Krok dva Schematický diagram e části
V horní části robota je hlavní deska Arduino, dvě serva a spínač. Pokud jde o obvod, který je zodpovědný za množství šumu, lze jej nahradit běžným odporem.
Servopohony jsou napájeny pátým kolíkem desky Arduino. Pokud jde o signální dráty, jsou připojeny ke kontaktům 9 a 10. Díky těmto kontaktům PWM je regulován úhel rotace servomotorů. Toto je úhel od 0 do 180 stupňů.
K restartu Arduina je nutné červené tlačítko.
Ve spodní části obvodu je deska stínění motoru Arduino.Na desce vidíte dva kanály, A a B, díky nim můžete v případě potřeby připojit dva motory najednou. Hlavním úkolem této desky je, že s ní můžete programově nastavit rychlost otáčení, směr, zlomení pro jakýkoli kanál motorů. Když se podíváte na diagram, pak se použije kanál B, zatímco kolík 13 určuje směr, kolík 11 určuje rychlost a kolík 8 slouží k ovládání brzd.
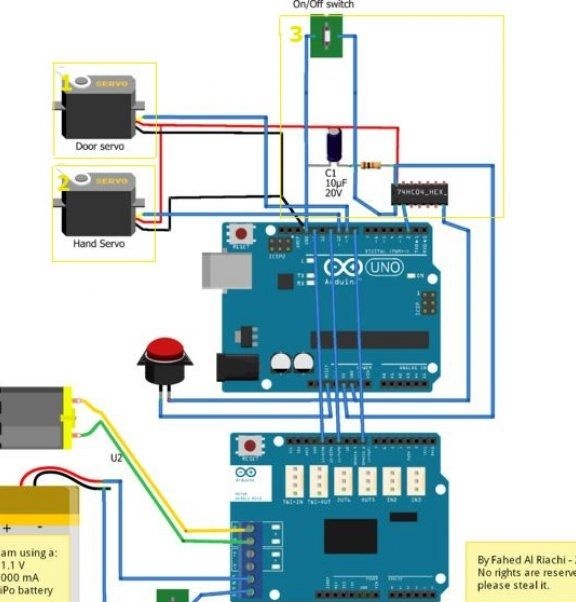
Zdrojem energie je baterie 11,1 / 1000 mA, která se připojuje k desce stínění motoru Arduino. Pokud se nepoužije, je baterie přímo připojena k hlavní desce.
Krok tři Instalace motoru
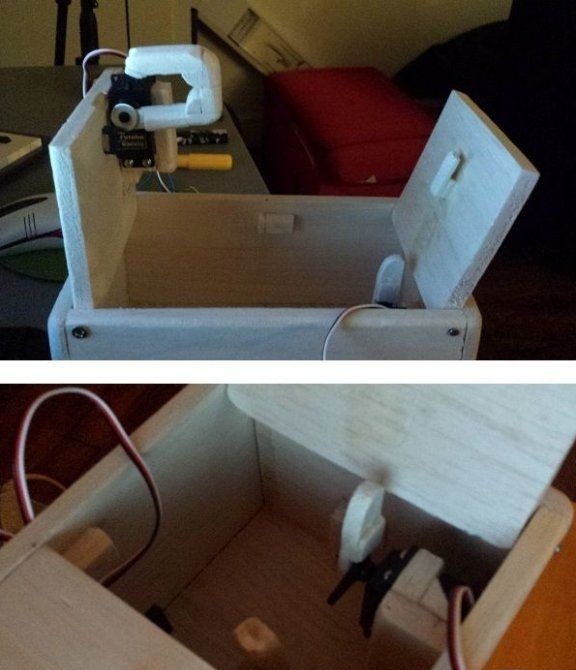
Servopohon a ruce jsou nainstalovány experimentálně, je třeba v praxi zkontrolovat, zda mechanika funguje správně. Ke kontrole poloměru odchylky motorů můžete použít program Arduino IDE.
Pro výrobu rukou odebraných dřeva jakéhokoli druhu. Hlavní věc je, že je lehká, protože jinak se zvýší spotřeba energie. Pokud jde o velikost ruky, je nastavena během instalace, výběrem požadované délky se dosáhne požadovaného účinku.
Posunovač a ruka krytu jsou namontovány tak, aby se během provozu nedotýkaly servomotoru.
Krok čtyři Připojíme servomotor a přepneme se na Arduino
Pomocí drátů a propojek je třeba propojit všechny elektronické prvky navzájem podle zadaného schématu. Dráty musí být položeny tak, aby nezasahovaly do pohyblivých prvků robota.
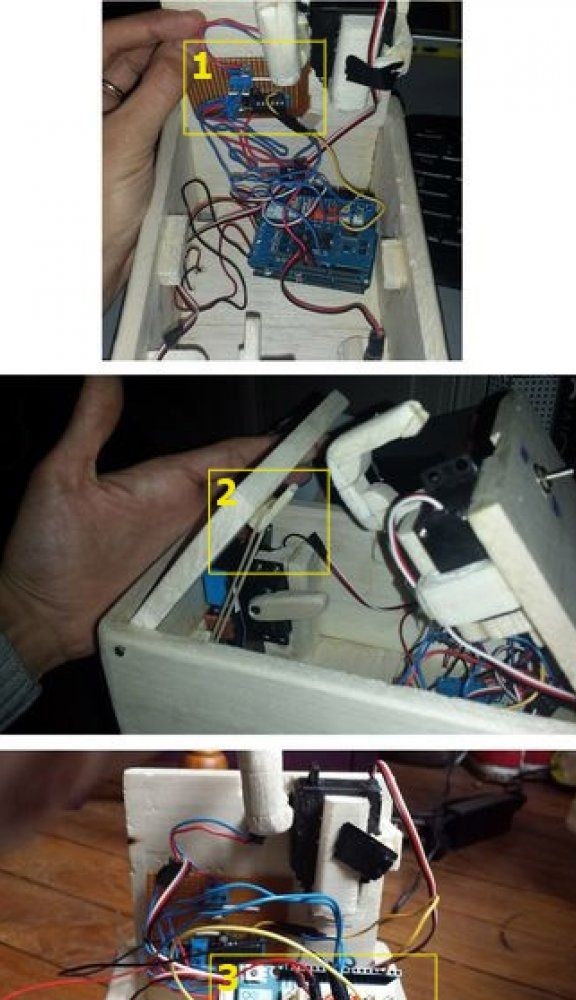
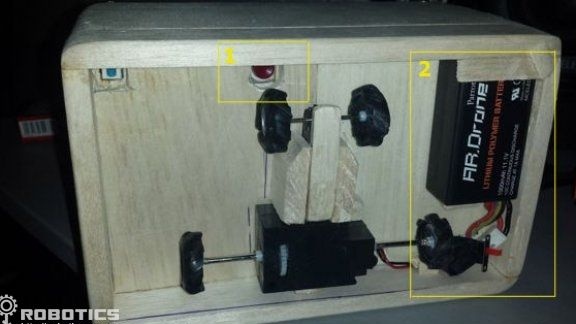
Pod číslem 1 vidíte, jak je připojeno a kde je umístěn spínací obvod. Číslo 2 označuje takový prvek jako elastický pásek, je nutné, aby se dveře otevřely s určitým napětím. Číslo 3 označuje štít motoru nainstalovaný na Arduino.
Krok pět Instalace mechanické části pro přemísťování krabice
Ve spodní části krabice je baterie, motor s koly, převodovka, resetovací tlačítko a přepínač pro ovládání výkonu robota. Před připojením prvků je třeba vypočítat vyvážení hmotnosti krabice. Aby byl robot stabilní, je kromě hlavní osy nainstalován další další.
Krok šestý Další doplňková funkce
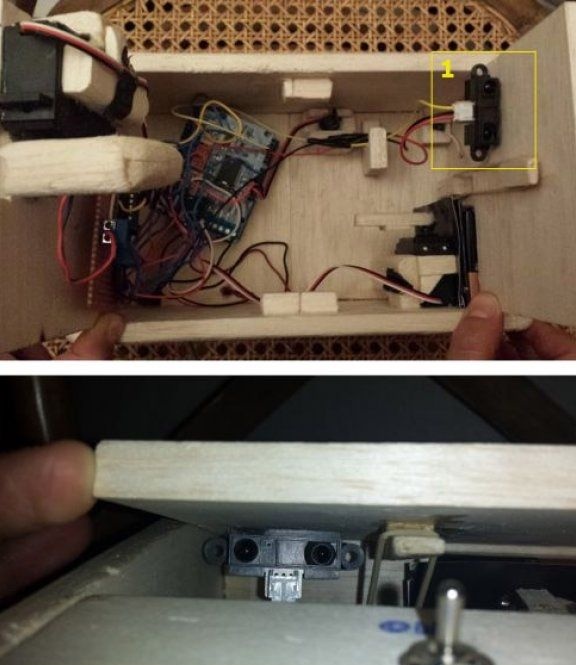
Aby robot určil směr pohybu, může být vybaven infračerveným senzorem. Současně, když se někdo pokusí dotknout přepínače, pole se bude pohybovat doprava a doleva. Pro tyto účely je vhodný snímač GP2Y0A21, který má tři vodiče. Žlutá musí být spojena s třetím pinem Arduino, červená s pinem 5 a černá k zemi.
To je vše, je připraven jednoduchý a zároveň zábavný robot. Taková hračka přinese radost nejen dítěti, ale také překvapí mnoho dospělých.
Firmware: