Článek bude diskutovat o tom, jak vyrobit miniaturního vibro-robota udělej to sám. Takové roboti když se zapnou, začnou tančit na hladkém povrchu a navíjí kruhy na stůl. Důvodem je, že na motoru je instalována nevyvážená hmotnost, která vytváří vibrace. Každý může sestavit takového robota doma, což vyžaduje minimum dovedností a materiálů.
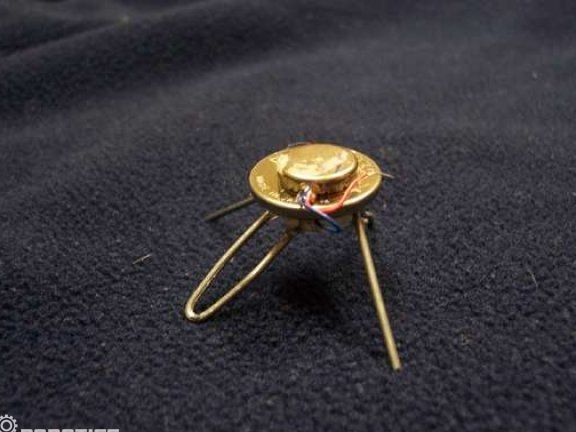
Konkrétně to model Robot se jmenoval Itty Bitty. Vibromotor ze starého mobilního telefonu se zde používá jako „srdce“ a robot je napájen baterií 3V hodin.
Materiály a nástroje pro vytvoření robota:
- 3V vybitá baterie;
- vibrační motor ze starého mobilního telefonu;
- jedna velká sponka na papír;
- páječka s pájkou a tavidlem;
- elektrická páska;
- horké lepidlo;
- značka tmavé barvy.

Z nástrojů potřebujete soubor, alkohol a kleště.
Výrobní proces robota:
První krok. Vytvořte nohy robota
Vytvoření nohou robota je nejdůležitějším okamžikem v celé této věci. Činnost celého robota bude záviset na tom, jak jsou správně vyrobeny. V první řadě by nohy měly být silné, protože během vibrací robot bude skákat docela silně. Jsou vyrobeny z jednoho kusu drátu. Pro tyto účely je nejvhodnější kancelářská sponka. Nejprve se musí narovnat a poté rozdělit na 6 stejných částí. V důsledku toho bude délka každé jednotlivé části 1/16 palce.



Důležitým bodem při práci s kancelářskou sponkou je plynulost pohybu. Pokud klip ohnete příliš rychle, může se zlomit. Pokud úhly přesahují 90 stupňů, musí být zaobleny.
Nyní musíte vzít jednu značku a ohnout klip o 90 stupňů na tomto místě, na druhé značky musíte ohnout v opačném směru. Pokud je konec klipu během ohybu zaoblený, významně to snižuje pravděpodobnost zlomení.



Na třetí značce musíte udělat ohyb 90 stupňů, ale ohyb by měl být co nejdále od konce.
Na čtvrté značce je ohyb 180 stupňů, konec by měl být pozadu.
Na páté noze se provede sklonění o 90 stupňů a mělo by být co nejdále od ostatních dvou sousedních nohou. Závěrem je třeba upravit nohy tak, aby se všichni nedotýkali podlahy rovnoměrně.


Krok dva Instalace motoru
Baterie funguje jako podpůrný prvek v takovém robotu. Musíte se třást a přilepit na něj vibrační motor. Poté musí být jeden z vodičů motoru připájen ke kontaktu s baterií, bude to horní kontakt. Aby bylo možné položit pájku, je třeba baterii mírně poškrábat, lze to provést pomocí souboru.

Krok tři Nalepte nohy
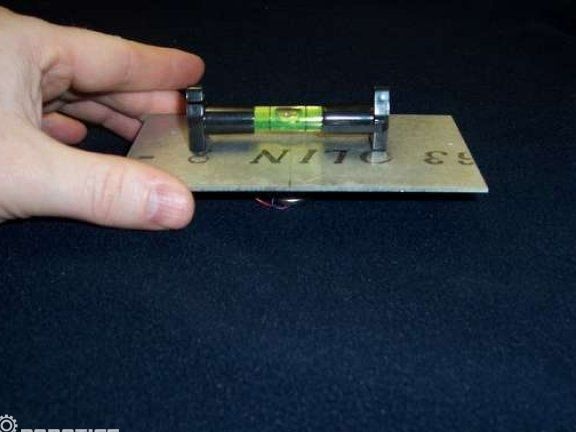
Nyní zbývá jen přilepit nohy k robotu. Chcete-li to provést, musíte položit baterii na stůl a nahoře umístit nohy robota. Dále musí být nohy stlačeny dolů, k tomu může být na nohy aplikována lineární úroveň nebo kus hliníku. Před nanesením lepidla je vhodné povrch baterie odmastit alkoholem. Lepidlo není třeba litovat, protože při práci na nohou působí dostatečně velká síla. Pokud špatně držíte nohy, robot se může během provozu rozpadnout.
Není třeba spěchat, aby se robot spustil, lepidlo musí být zpevněno. Autor doporučuje vložit obrobek do chladničky, takže lepidlo rychleji schne.


To je vše, robot je připraven a můžete to zkontrolovat. Chcete-li zapnout robota, musíte vzít kousek elektrické pásky a přilepit druhý vodič z motoru ke svorce baterie. Umístěním robota na hladký stůl můžete nyní sledovat, co bude dělat.