
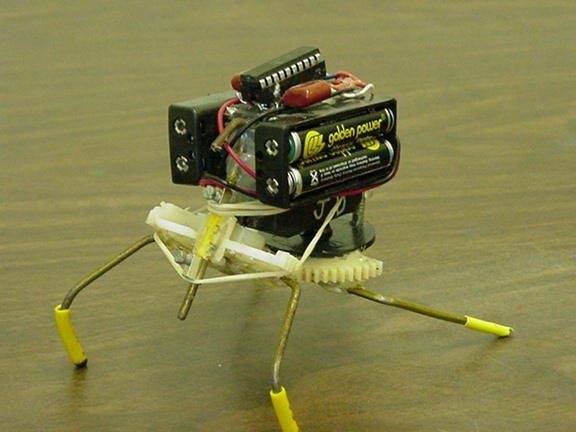
Není nic zajímavějšího než chodící robot, protože takový robot napodobuje nejlepší živé bytosti, které s námi žijí na naší planetě. Chcete-li, aby se takový robot není obtížné, ale musíte mít touhu a nějaké dovednosti v oblasti elektroniky.
Materiály a nářadí:
- kousek měděného drátu;
- dva držáky baterií prstů;
- dva monolitické keramické kondenzátory po 0,22 mF;
- jeden rezistor 3,3 M;
- 74NST240 osmičkový invertorový čip pro osm kanálů (jeden);
- 20 pin DIP 74XX240 nebo 74XX245 (jeden);
- servomotor (jeden);
- spínač;
- jedno plastové zařízení;
- kabelový konektor.
Výrobní proces:
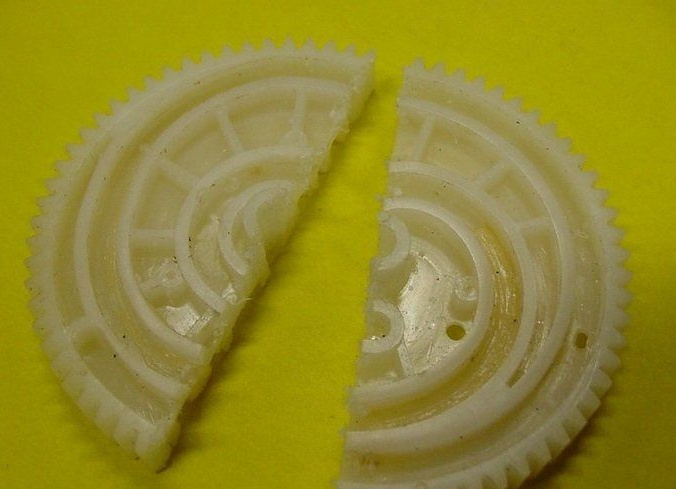
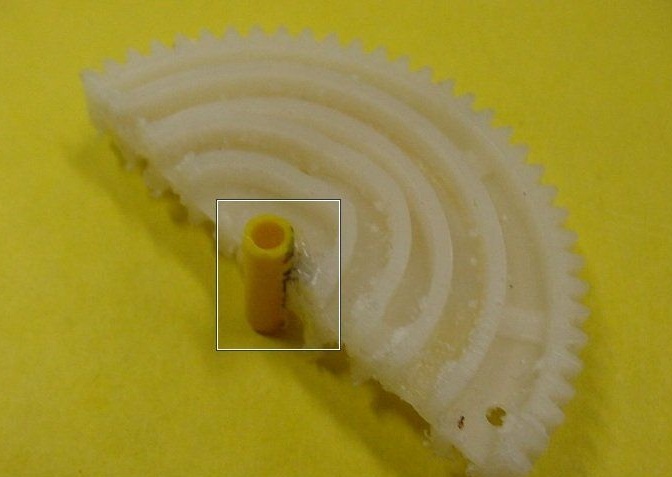
První krok. Příprava ozubeného kola
Musíte vzít plastové vybavení a rozdělit ho na dvě stejné části. Pak musíte roh odstranit a pomocí lepidla ho připevnit k jednomu půlkruhu.

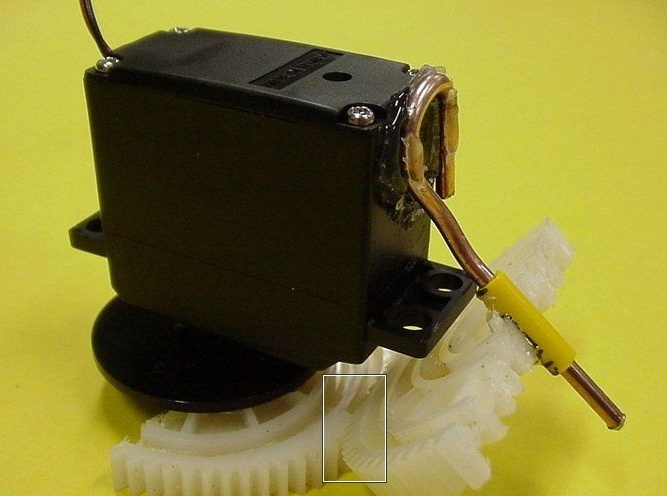
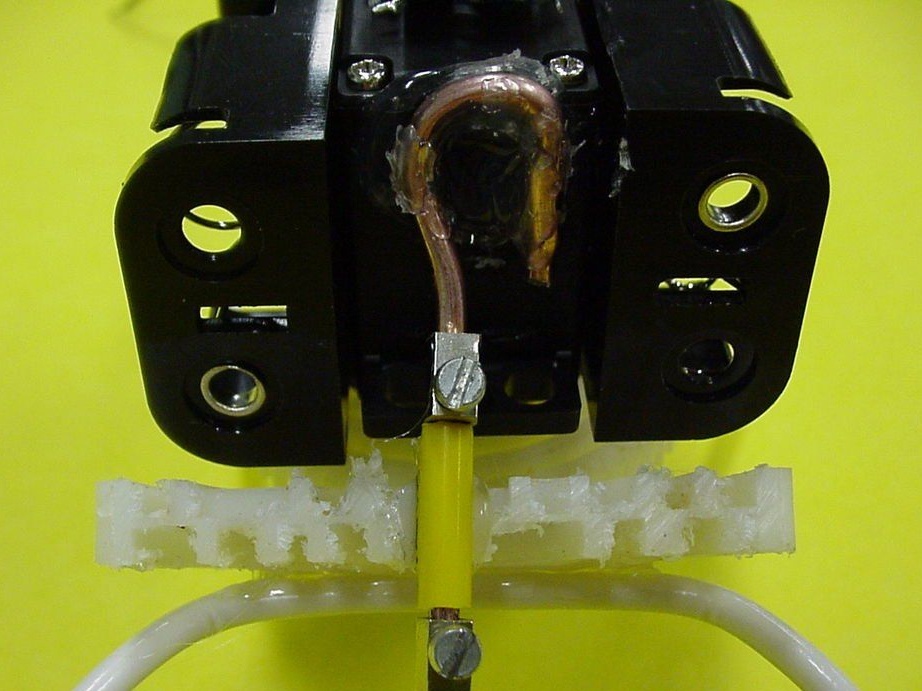
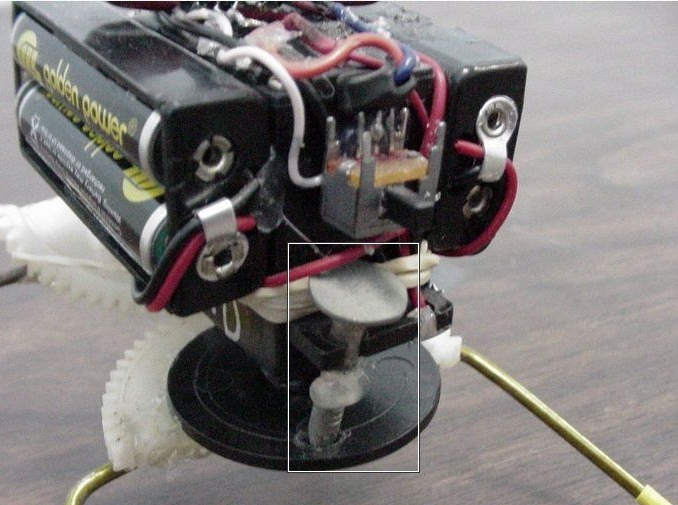
Krok dva Změna motoru
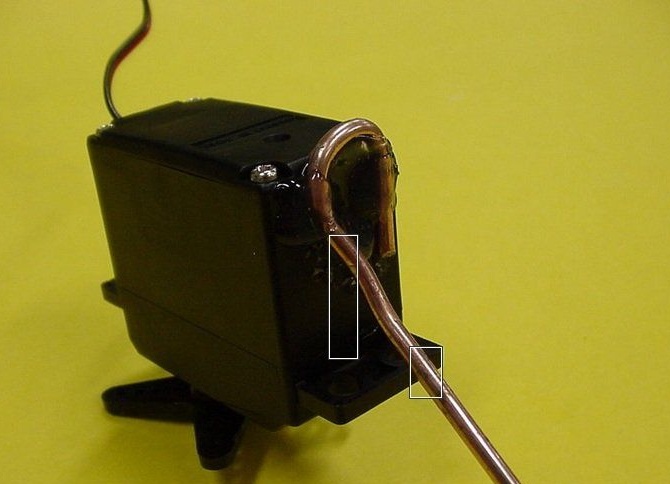
Servomotor musí být přepracován tak, aby pracoval pouze při rotaci. Pak je třeba na ni nalepit měděný drát, jak je znázorněno na obrázku.
Také v této fázi budete potřebovat plastovou trubici vhodného průměru, musí být přilepena k půlkruhu. Servomotorový roh je následně umístěn na své původní místo. Poté na měděný drát položte plastovou trubici. V této fázi lze práci považovat za dokončenou.

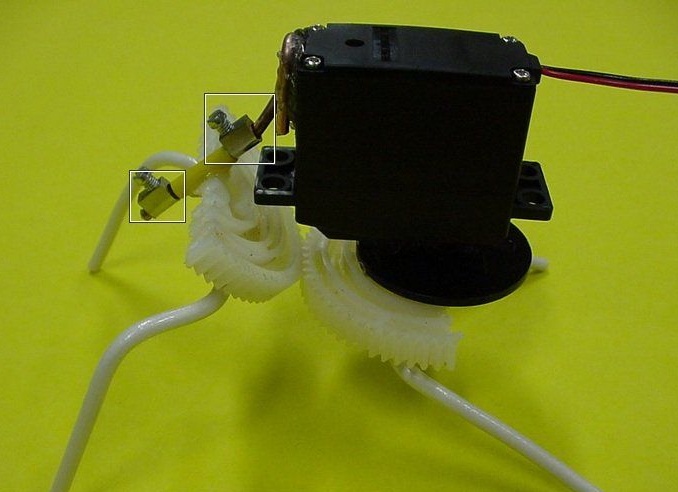
Krok tři Vytváření a instalace robotických tlapek
Měděný drát se používá jako nohy, musí být ohnutý, jak je znázorněno na obrázku. Poté autor přilepí tlapky na půlkruhy. Nyní můžete k servomotoru připojit také držáky baterií.


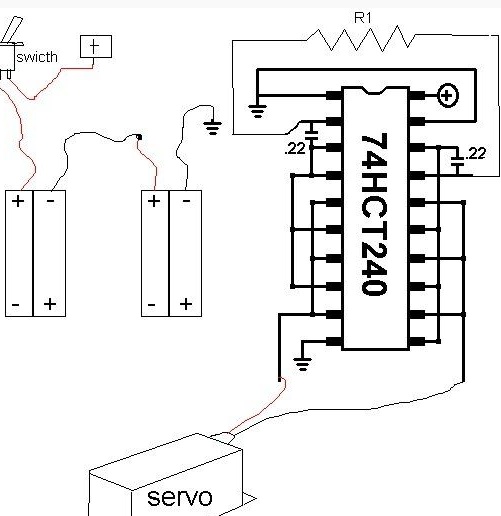
Krok čtyři Práce s elektronikou
Možná je to nejtěžší a rozhodující okamžik. Celý systém musí být připojen jasně, jak je znázorněno na obrázku. Ihned po připojení bude robot připraven a může být otestován.

Změnou úhlu nohou můžete dosáhnout různých vlastností robota. Můžete to udělat rychleji nebo pomaleji. Můžete také vybavit robota dalšími ovládacími prvky, například knírem, kterým určí překážku. Můžete také vybavit robota očima ve formě LED, což vytvoří ještě větší realismus podoby živé bytosti.
Takového robota musíte spustit na rovném povrchu. Aby se zabránilo sklouznutí jeho nohou, lze Cambrices nosit na jejich koncích.