

Na fórech jsou často otázky, jak vyrobit malého robota udělej to sám z improvizovaných materiálů. Někdo chce vyzkoušet své silné stránky a dovednosti při vytváření mini-robotů a někdo prostě chce překvapit přátele nebo jejich dítě. Ve skutečnosti je vše velmi jednoduché, stačí ukázat trochu trpělivosti a vynalézavosti.
Upozorňujeme na následující video:
K vytvoření malého hmyzu budete potřebovat:
- zahradní lampa (solární baterie);
- dva kondenzátory;
- motor;
- tranzistor VD135;
- tranzistor A733P;
- LED;
- rezistor;
- páječka;
- měděné dráty;
- nůž;
- horké lepidlo;
- kancelářské sponky.
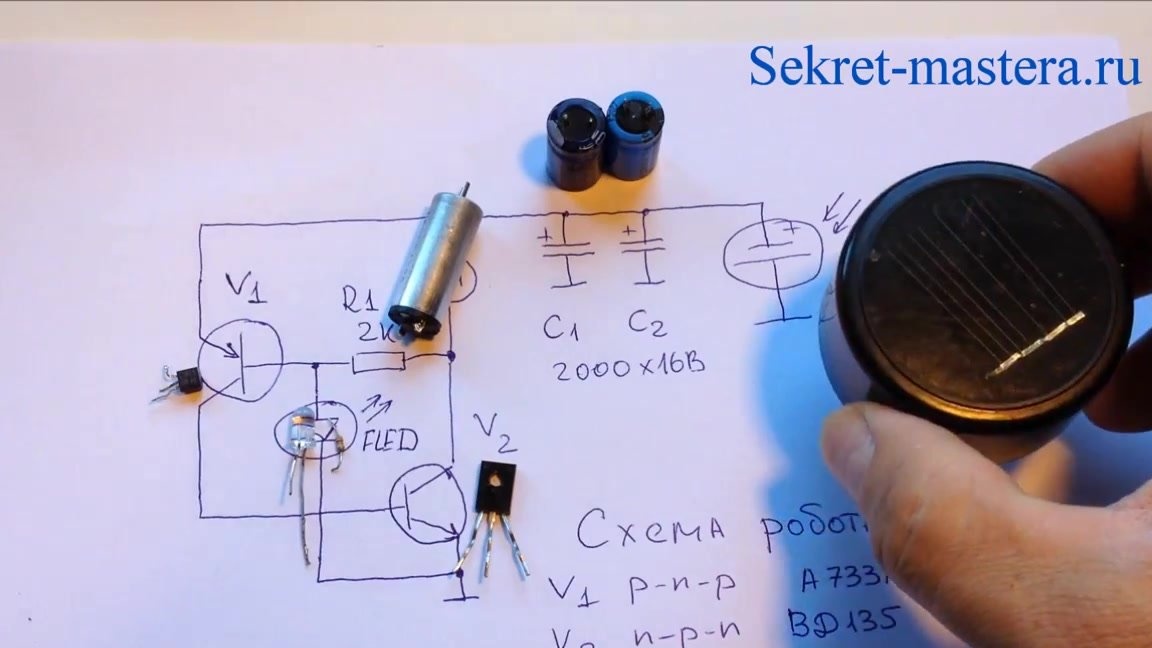
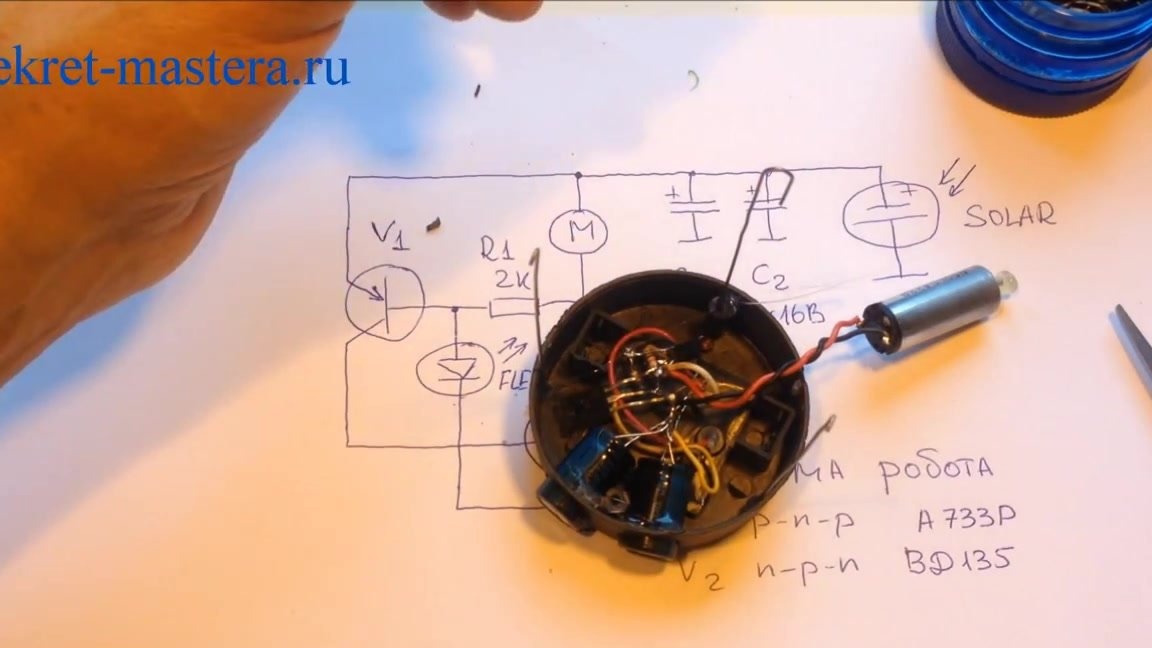
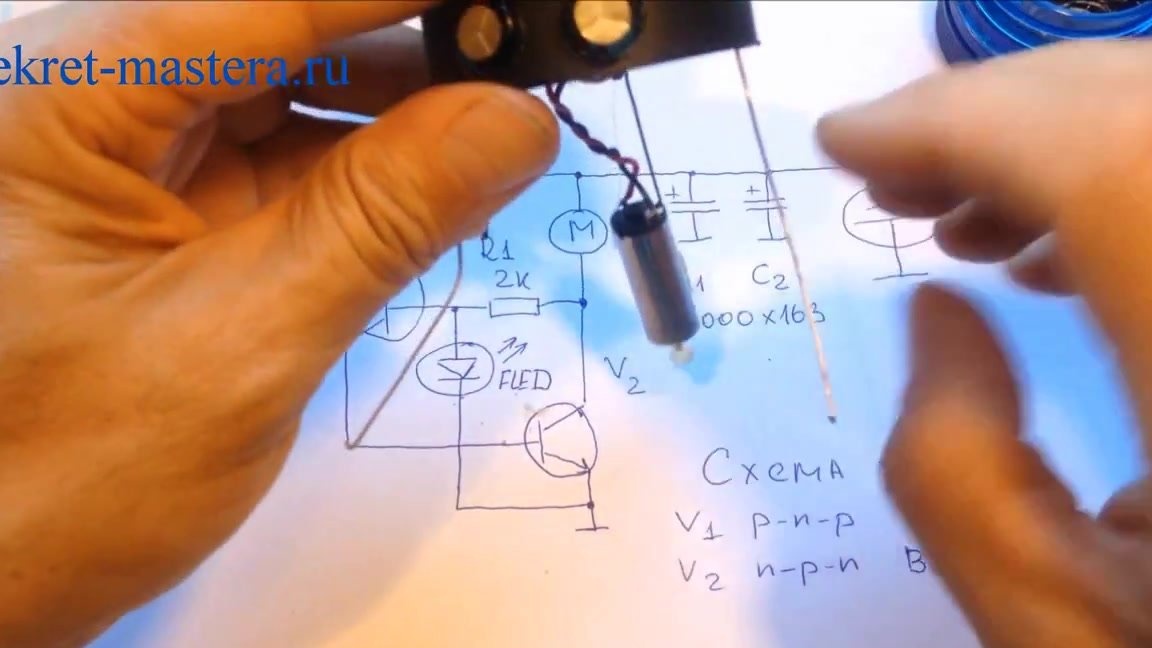
Kapacitní odpor každého kondenzátoru je 2000 μF, jmenovité pro napětí 16V.
Motor lze použít ze starého zubního kartáčku a také můžete použít motor ze staré filmové kamery.
Výkonný tranzistor (je možné jej nahradit tranzistorem se středním výkonem), struktura n-p-n, v tomto případě použije VD135.
Druhý tranzistor struktury p-n-p v tomto případě použije A733P.
Blikající LED dioda v pravidelných intervalech bliká.
Rezistor 2 kΩ.

Poté, co byly připraveny všechny potřebné rádiové prvky, začneme pracovat.
Pracovní princip:
Energie ze solární baterie je akumulována na dvou kondenzátorech a při určité frekvenci je aktivována LED dioda, která dodává energii přes výkonný klíčový tranzistor do motoru. V tomto případě motor vybije kondenzátor a provede některé rotační pohyby.
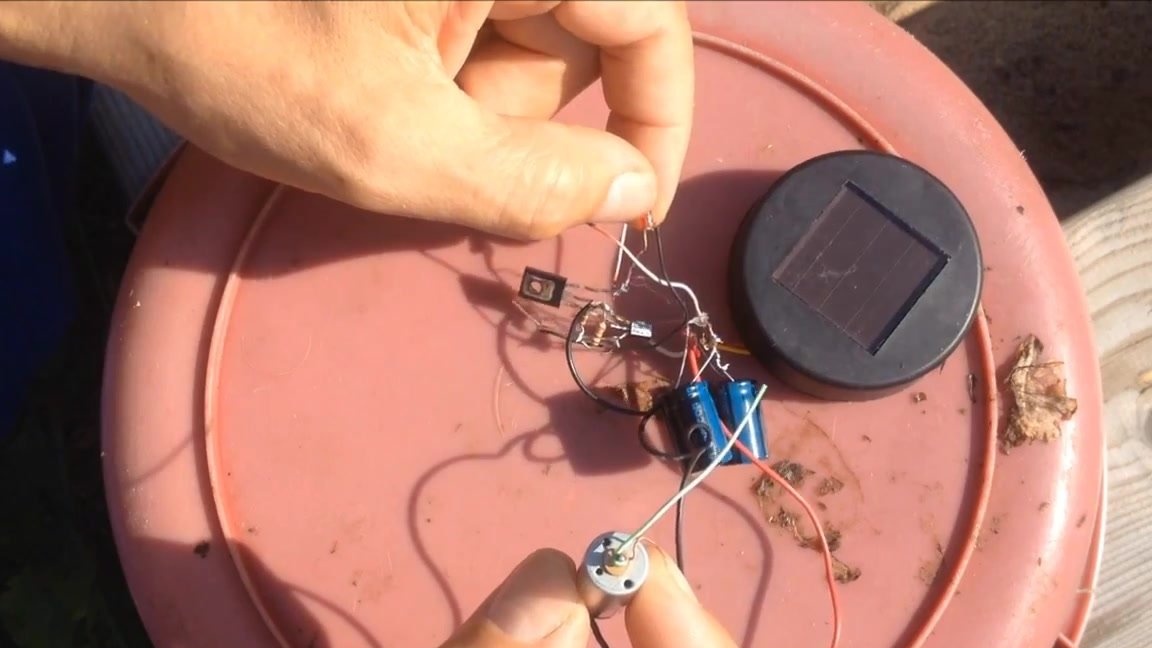
Montáž:
V případě solární baterie vytvoříme dva otvory nožem a vložíme do nich kondenzátory - to budou oči našeho hmyzu. Upevníme je pomocí tavného lepidla.
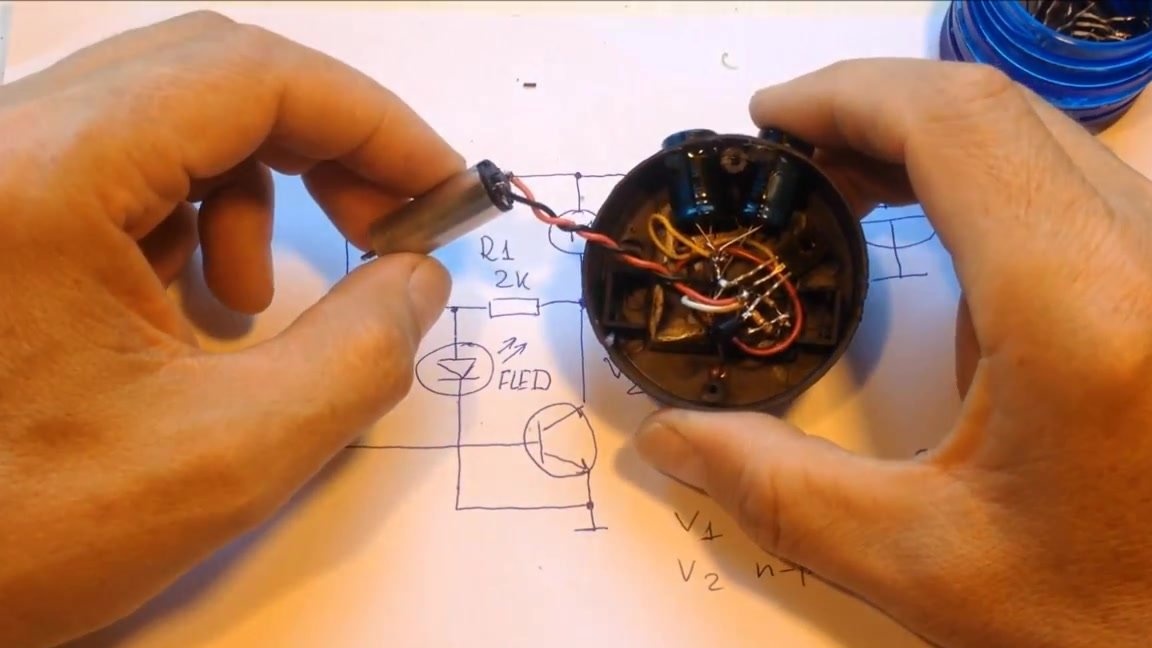
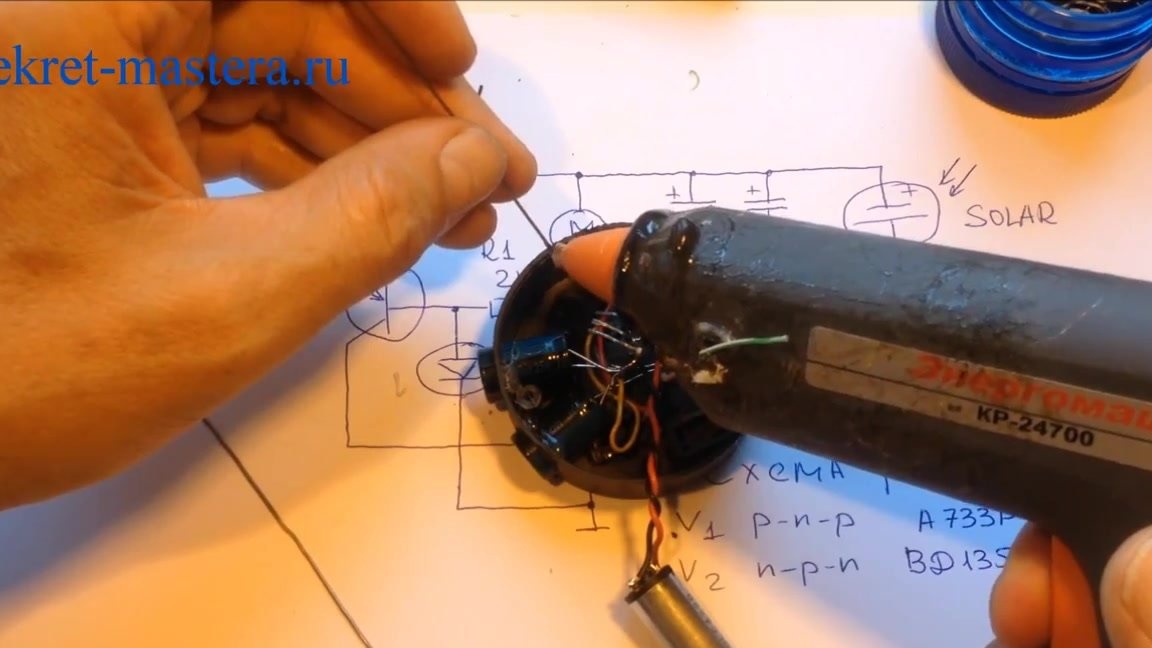
Poté pomocí páječky a drátů shromáždíme všechny rádiové prvky podle schématu.
Všechny prvky jsou upevněny uvnitř solární baterie, na podlouhlém drátu necháváme pouze motor a neopravujeme ho.
Velká špička lepidla se aplikuje na špičku osy motoru, můžete dokonce několikrát vytvořit malou kouli na špičce.
Nohy našeho hmyzu vyrobíme z běžných kancelářských sponek.Narovnejte kancelářskou sponku tak, aby zůstala pouze malá špička nezvázaná, a připevněte ji k tělu pomocí tavného lepidla. Celkem budeme mít tři nohy.
Připojíme náš motor k jedné z nohou, takže robot opřel se o míč vytvořený na jeho konci.
Volitelně můžete dát nohám potřebný tvar, mírně se ohnout nebo narovnat.
