


Bohužel, tento materiál nebude tahat za plnohodnotný článek, a proto jsem se rozhodl umístit jej do „tipů“, možná někdo může potřebovat materiál. Článek říká, jak pájet elektronický součásti na desce plošných spojů pomocí automatizovaného manipulačního ramene.
Myšlenka tohoto projektu nastala mistrovi náhodou, když studoval různé schopnosti robotických manipulátorů, a pak zjistil, že existuje několik, které pokrývají oblast automatizovaného svařování a pájení robotickým manipulátorem.
Nářadí a materiály:
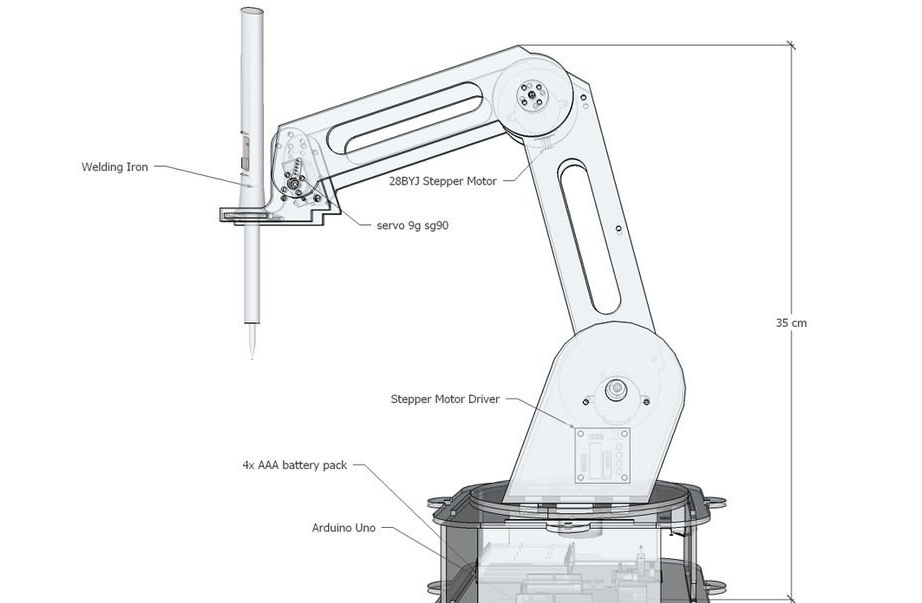
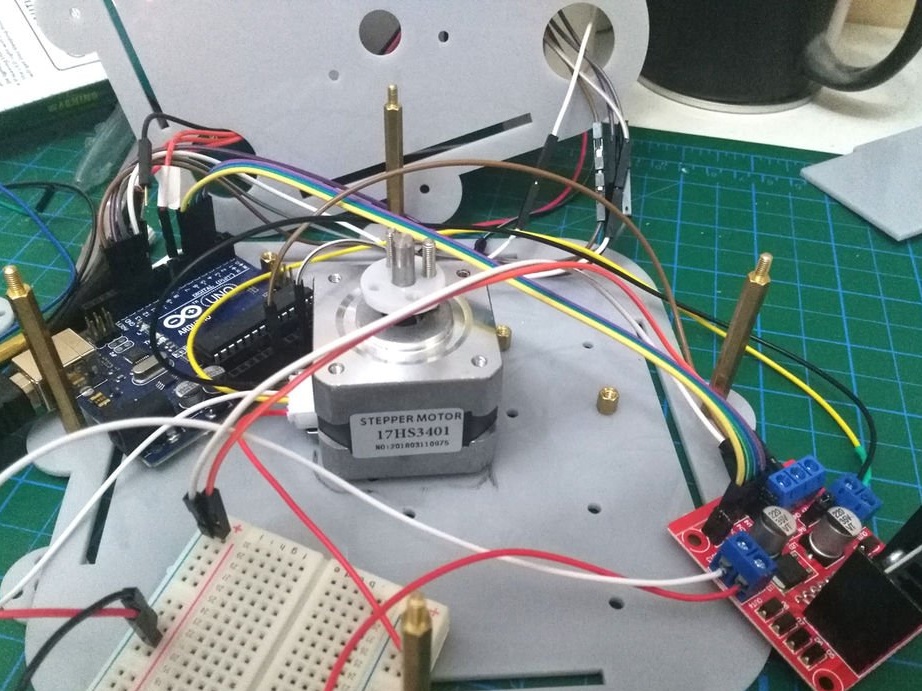
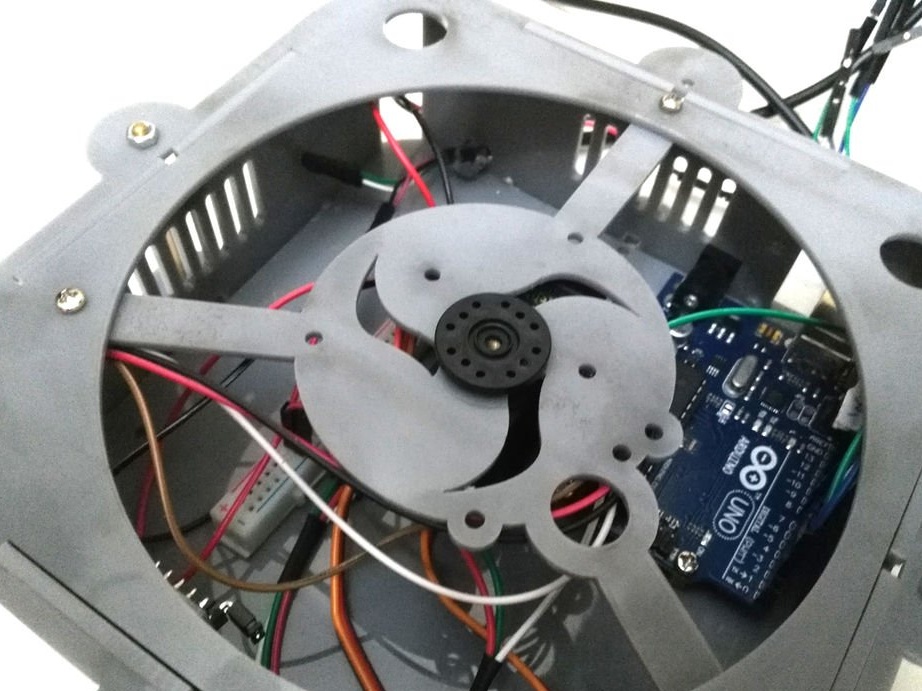
-Step motor 28BYJ-48 s ovladačovým modulem ULN2003;
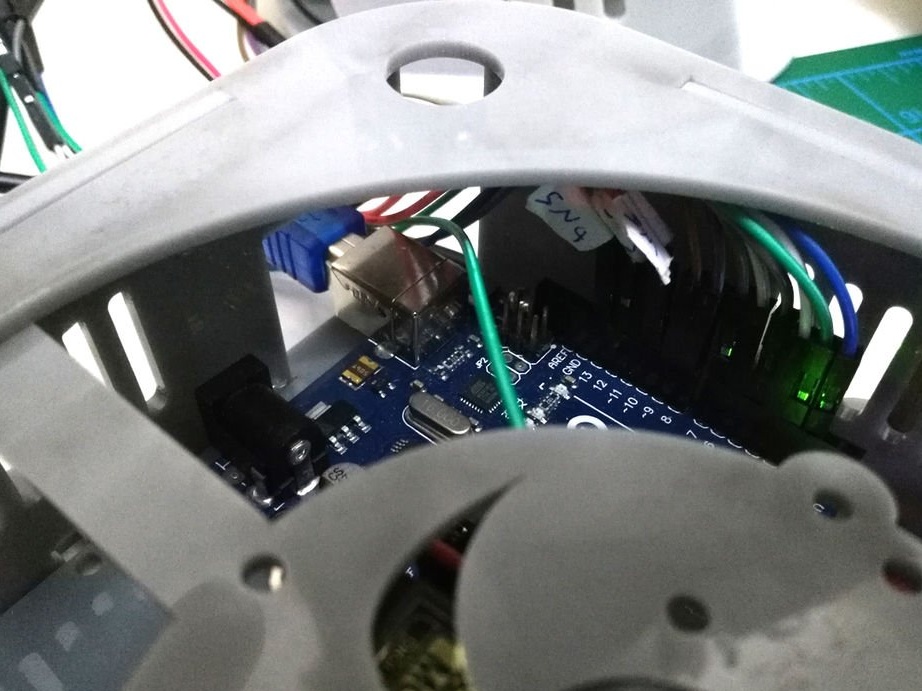
- Arduino Uno R3;
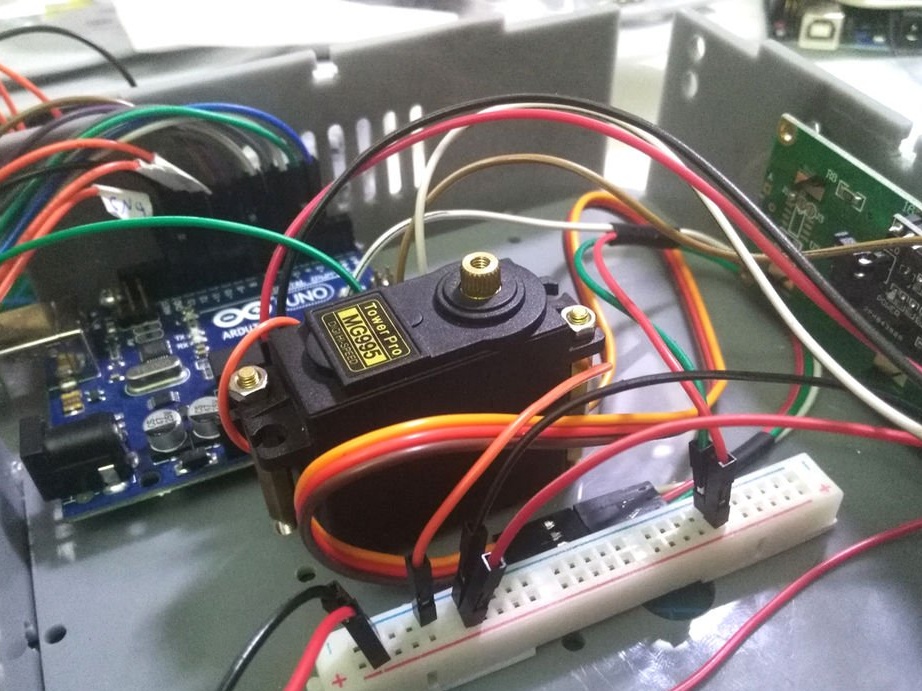
Servomotor MG-90S;
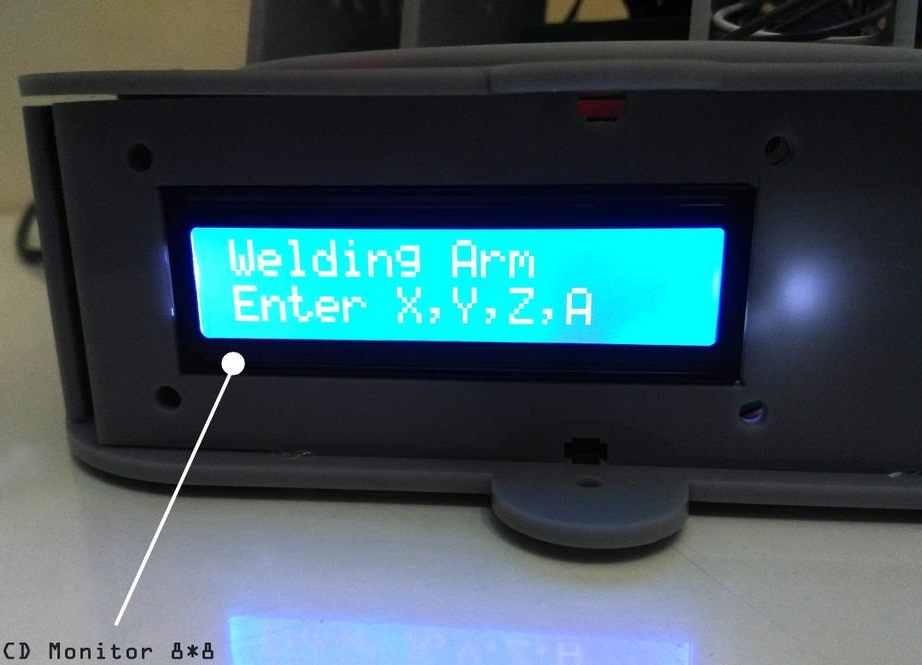
- LCD 1602;
-Board;
- spojovací dráty;
- Snižovací převodník;
-Servox SC-1252MG $ Servo Drive
-Fastery;










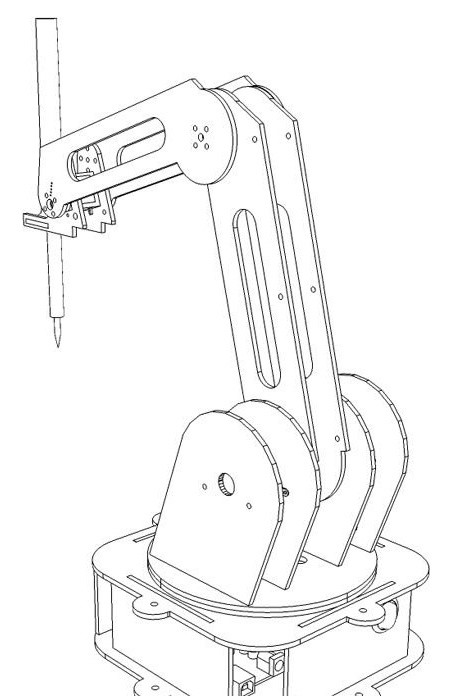
Průvodce nejprve vyvinul projekt. Část detailů byla vyříznuta na CNC stroji s laserem.
Po sestavení všech částí bylo odhaleno několik problémů:
1. Páky byly příliš těžké na to, aby je mohly ovládat malé krokové motory.
2. Od té doby model byl vyroben z plastu, tření rotující základny bylo vysoké a pohyby nebyly plynulé.
Prvním řešením bylo koupit větší krokový motor schopný vydržet váhu a tření, a master předělal základnu pro instalaci většího krokového motoru.
Problém však nezmizel, a poté mistr úplně změnil základní konstrukci a nainstaloval servomotor s převodovkou a kovovými převody.
3. Napětí.
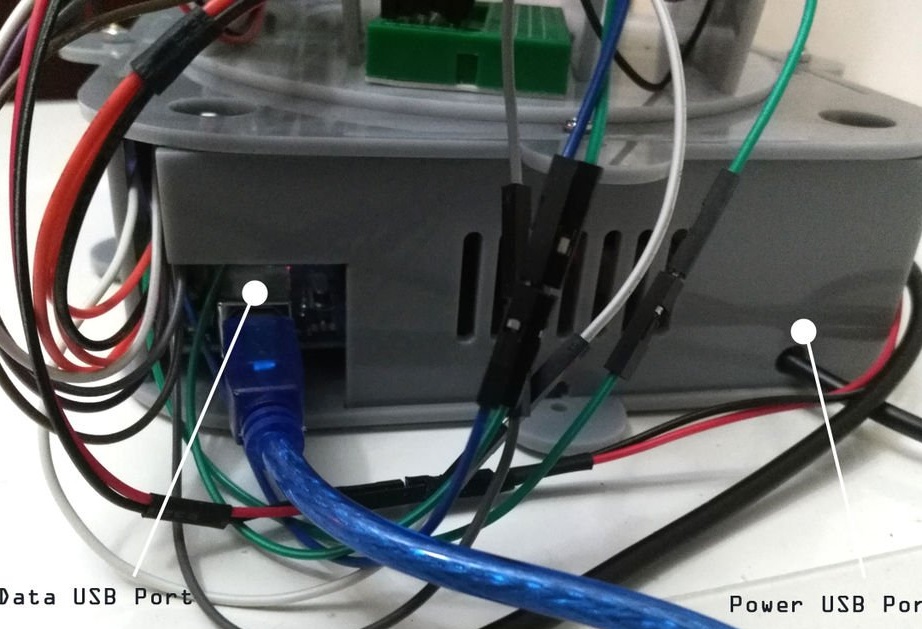
Arduino lze napájet buď ze stejnosměrného napájecího konektoru (7-12 V), USB konektoru (5 V), nebo z kolíku VIN desky (7-12 V). Napájení přes 5 V nebo 3,3 V kontakty obchází regulátor a hlavní se rozhodl koupit speciální USB kabel, který podporuje 5 V z PC nebo jakéhokoli zdroje napájení.

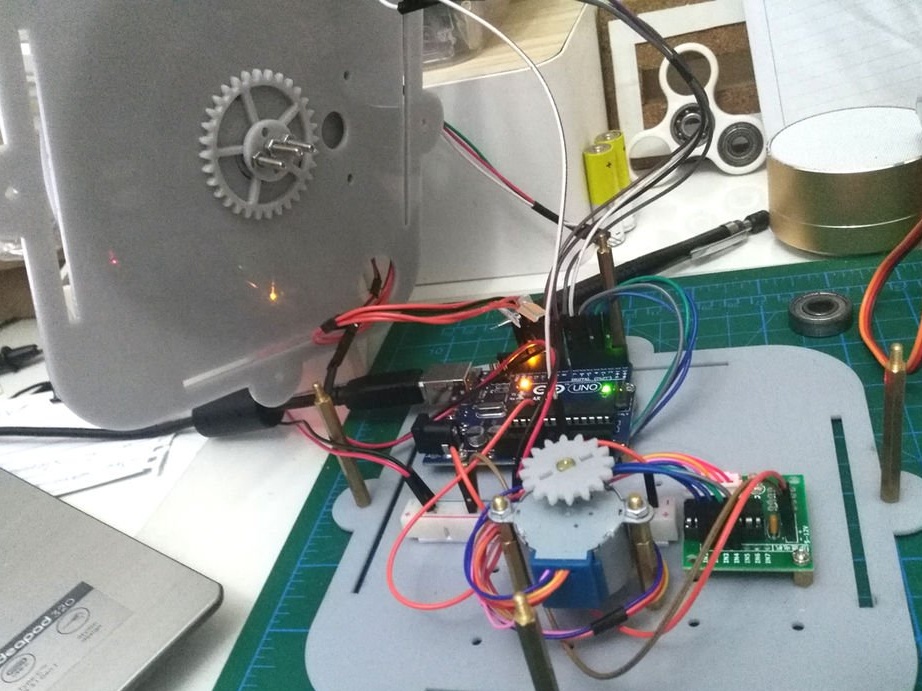
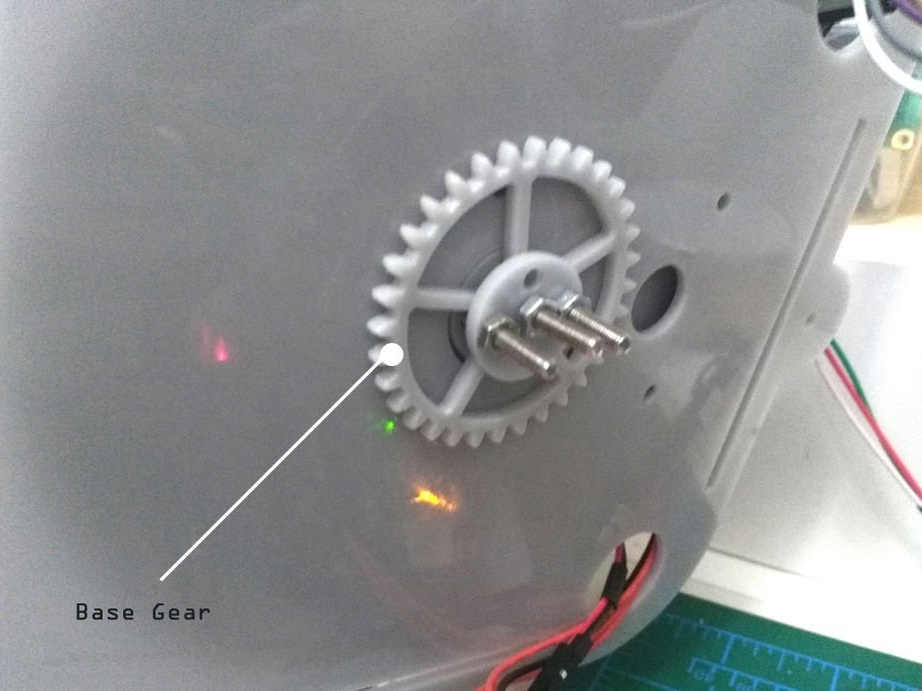

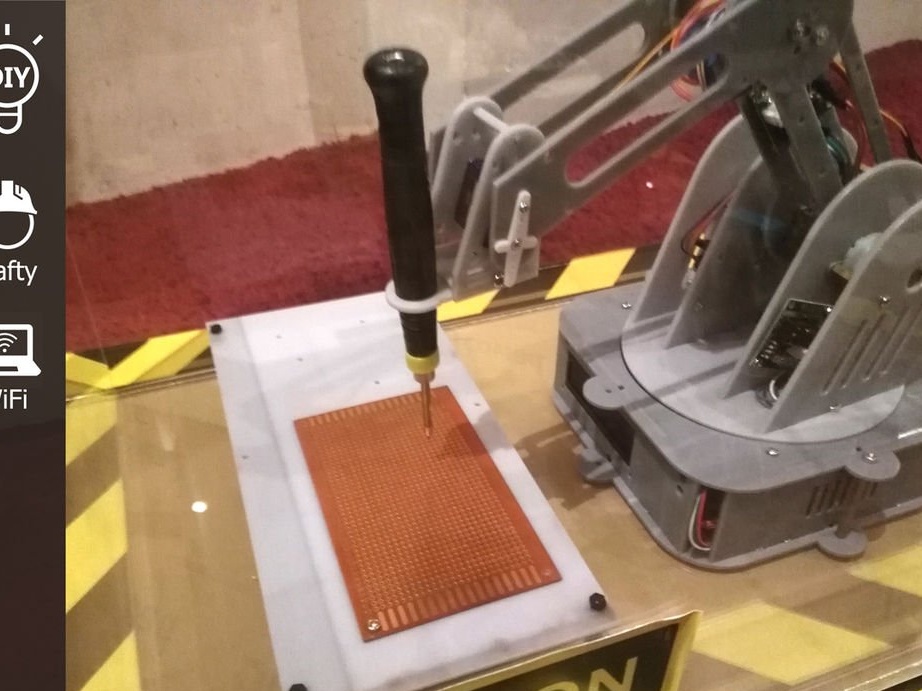
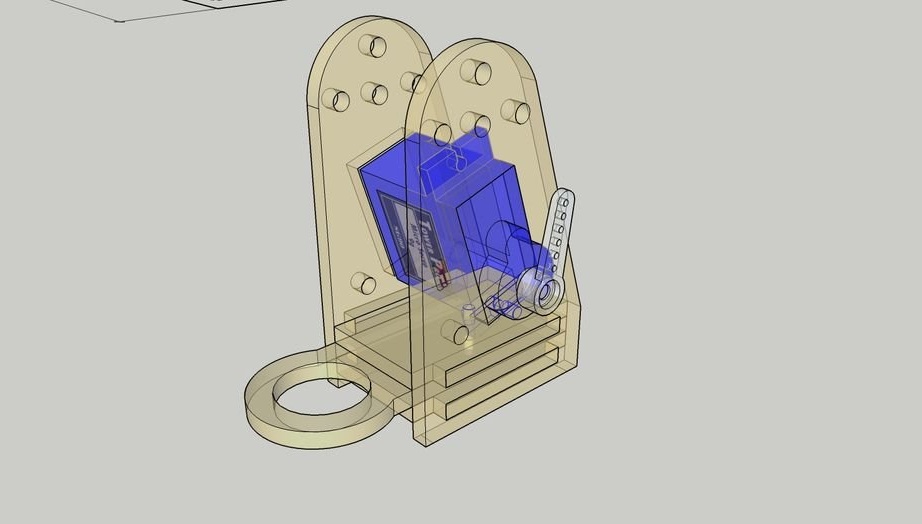
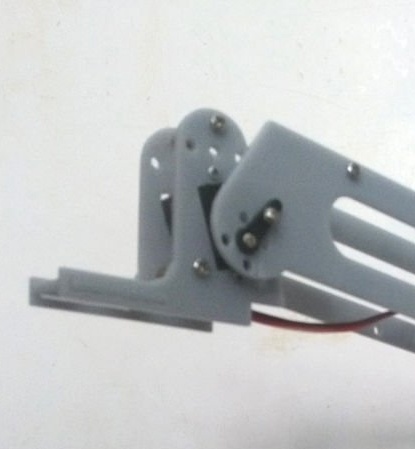
Po několika úpravách hlavní model změnil konstrukci modelu, zmenšil velikost držáků a vytvořil vhodný otvor pro převodovku servomotoru, jak je vidět na fotografii.

Aby držel páječku, udělal pán speciální držák.Pro správnou funkci je třeba servomotor s parametrem otočení o 180 stupňů.

Kód si můžete stáhnout níže.

ProjectCodeFirst.ino
Hlavní body výroby zařízení lze vidět ve videu.
Informace samozřejmě nestačí, neexistuje žádný diagram, neexistují žádné soubory pro CNC, neexistují příklady fungování zařízení, ale je tu dobrý nápad a možná i průvodce, který by měl zájem, na základě této myšlenky vytvoří plně funkční zařízení.