

Dobrý den milovníci arduina! Když to viselo na internetu, narazil jsem na docela zábavný článek o tom, jak udělat z ruky manipulátor, který opakuje pohyby lidské ruky, inspirovaný jednoduchostí a efektem domácí domácí se rozhodl to sbírat. Zjistil jsem, že senzory ohybu na Alliekspress jsou pro vysílačovu ruku a mám trochu mrtvé. Jedna věc stála v oblasti $ 15-20, ukázalo se, že 5 z těchto senzorů za jednu ruku bude stát $ 75-100 a to je pouze pro senzory! Po nějaké době jsem se naučil, jak takové senzory vyrobit udělej to sámUkázalo se, že je velmi jednoduchý a levný.
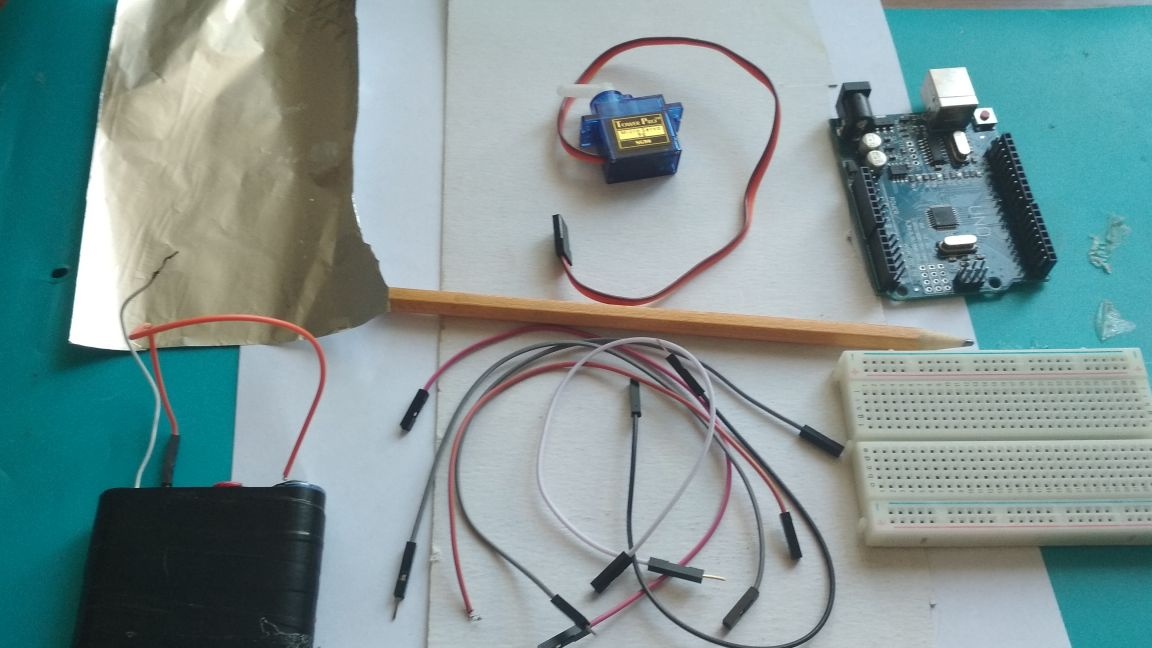
A tak pro snímač ohybu potřebujeme:
platba Arduino Uno ()
- prkénko
- spojovací vodiče jako „otec-matka“ nebo „otec-otec“
-servomotor
karton
papír
fólie
tužka
- napájení od 6 do 12 voltů (používám 4 baterie zapojené do série při 1,5 V)
Z nástrojů, které potřebujeme:
lepicí pistole
nůžky
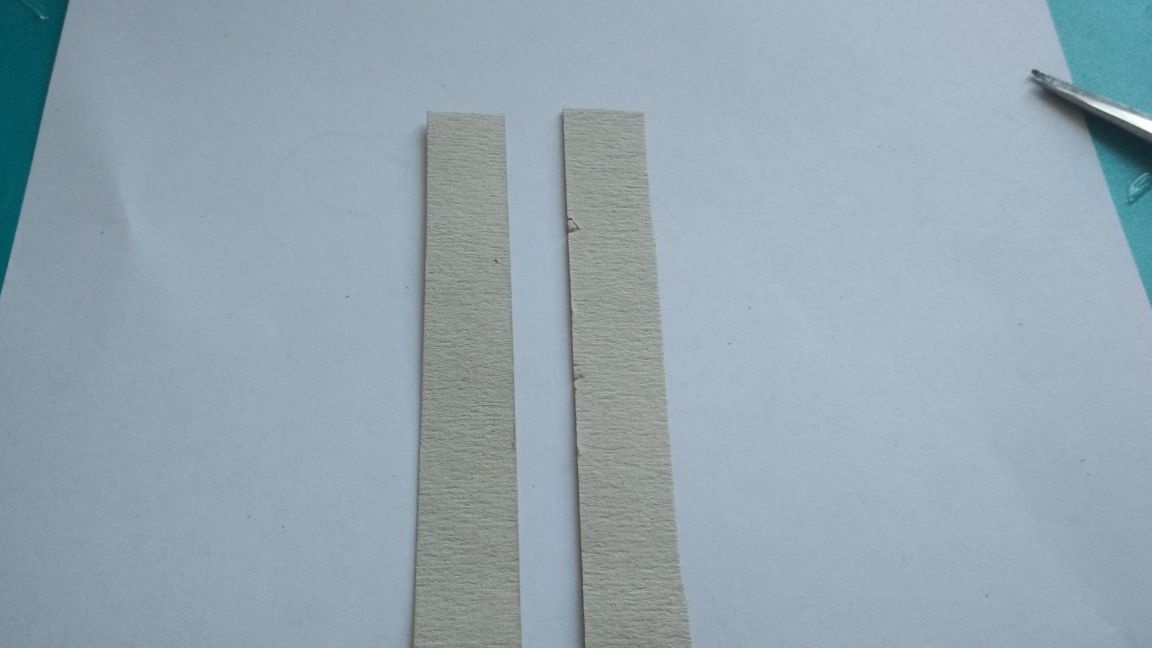
A tak první věc, kterou jsme vyřízli z lepenky, jsou dva pruhy o 2 cm delší než ukazováček a asi 1 cm široké:

Vystřihněte jeden kousek papíru jen o něco méně:

Tužka co nejlépe odstínuje obě strany papírového proužku:


Vyřízněte dva pruhy fólie menší než papír:
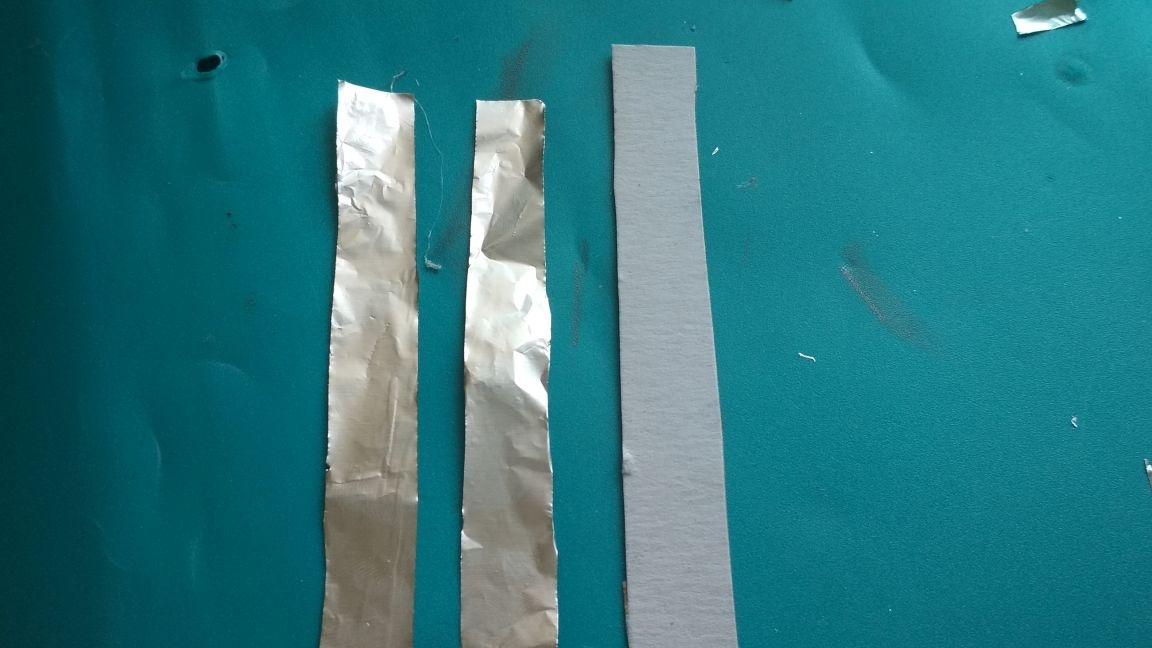
Nalepte je na lepenkové proužky, jak je vidět na fotografii:

Z propojovacích vodičů „otec-matka“ jsme odřízli výstupní „matka“ a jejich konce vyčistili od izolace:
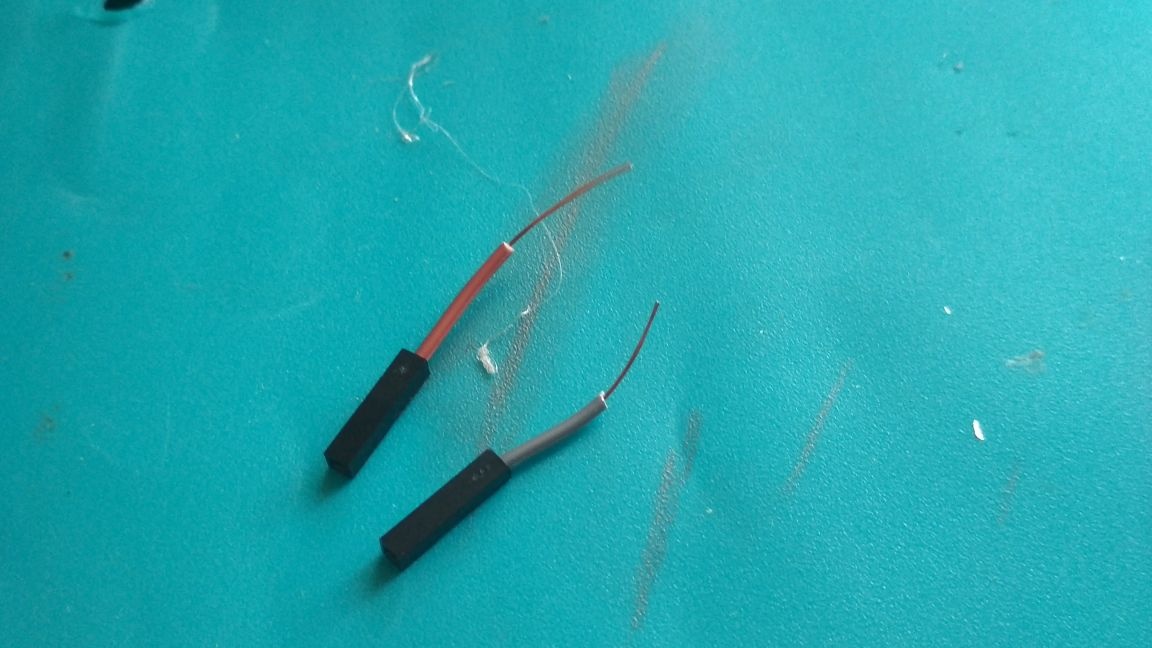
Připevňujeme z pásky nebo pájky:

K jedné z polovin připevňujeme papírový pás tak, aby byl v kontaktu s fólií, potom druhou polovinou strany přikryjte fólií, zatlačte a nalepte na strany:

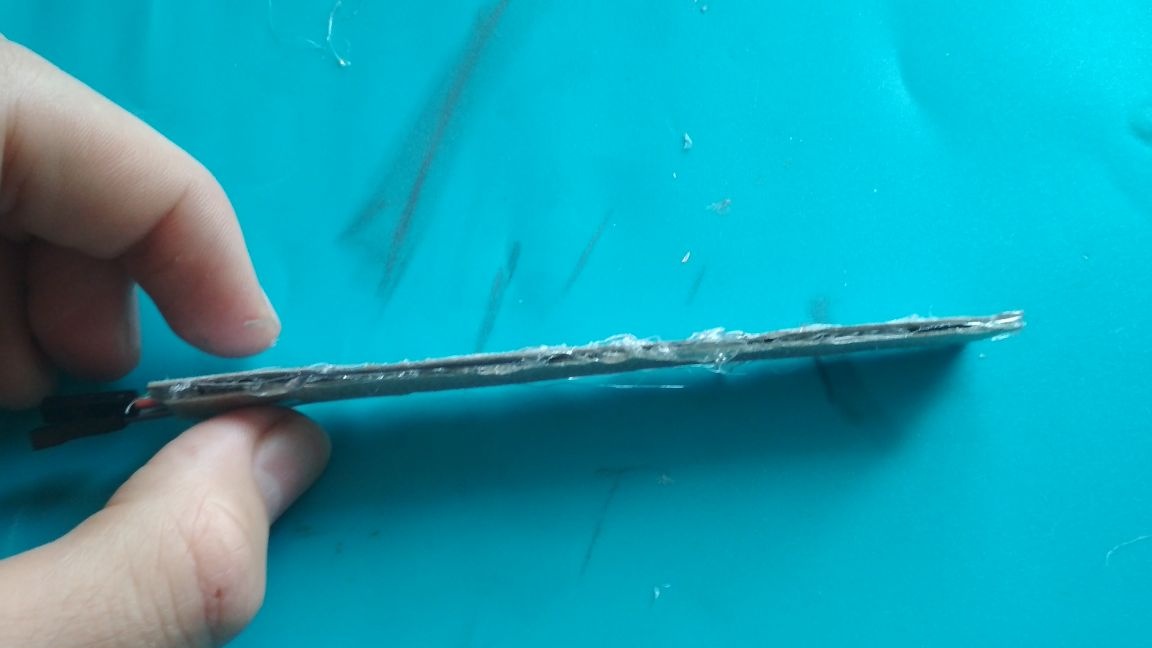

Vyrábíme takové „hady“ na každou stranu pomocí horkého lepidla, jsou potřeba, aby byl design pružnější

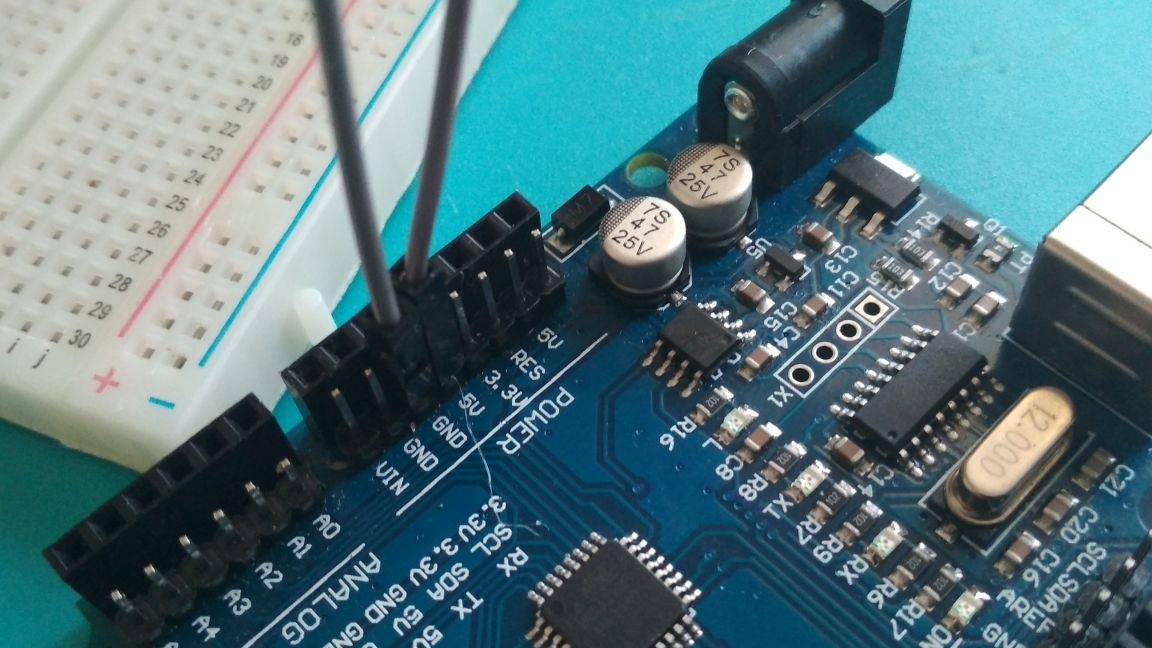
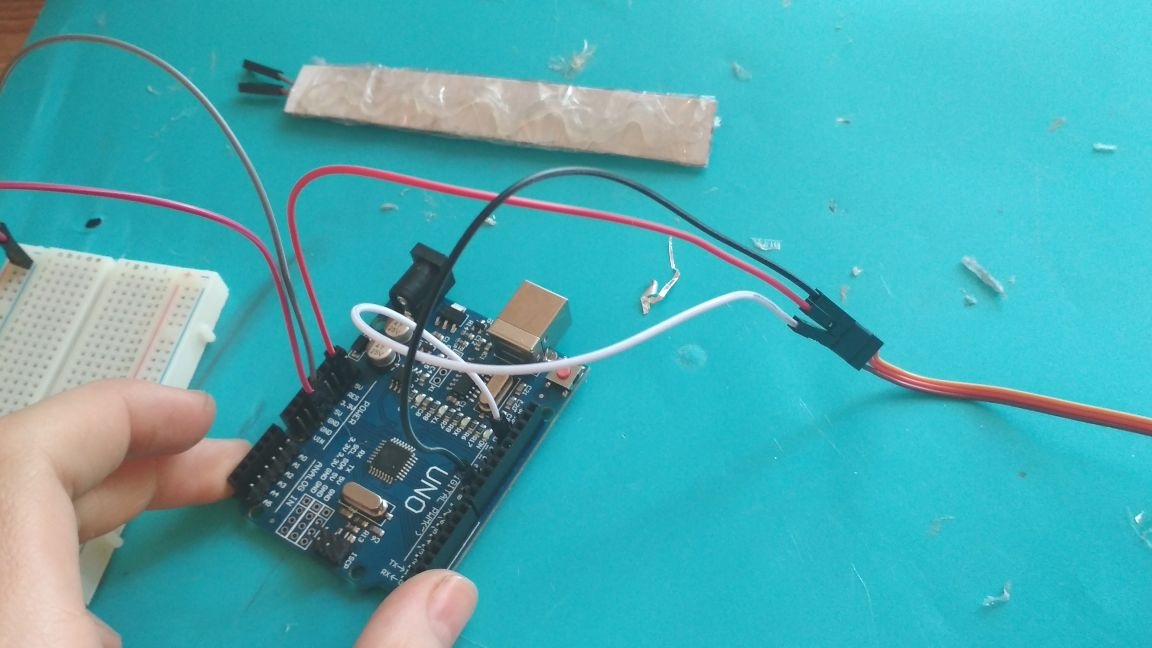
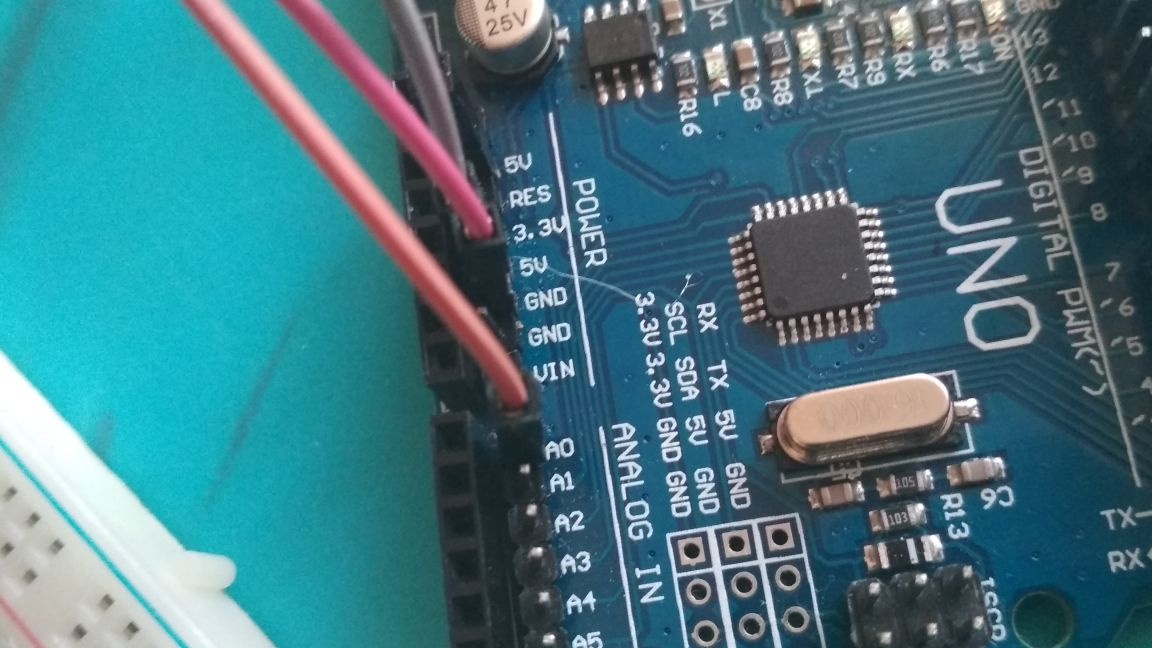
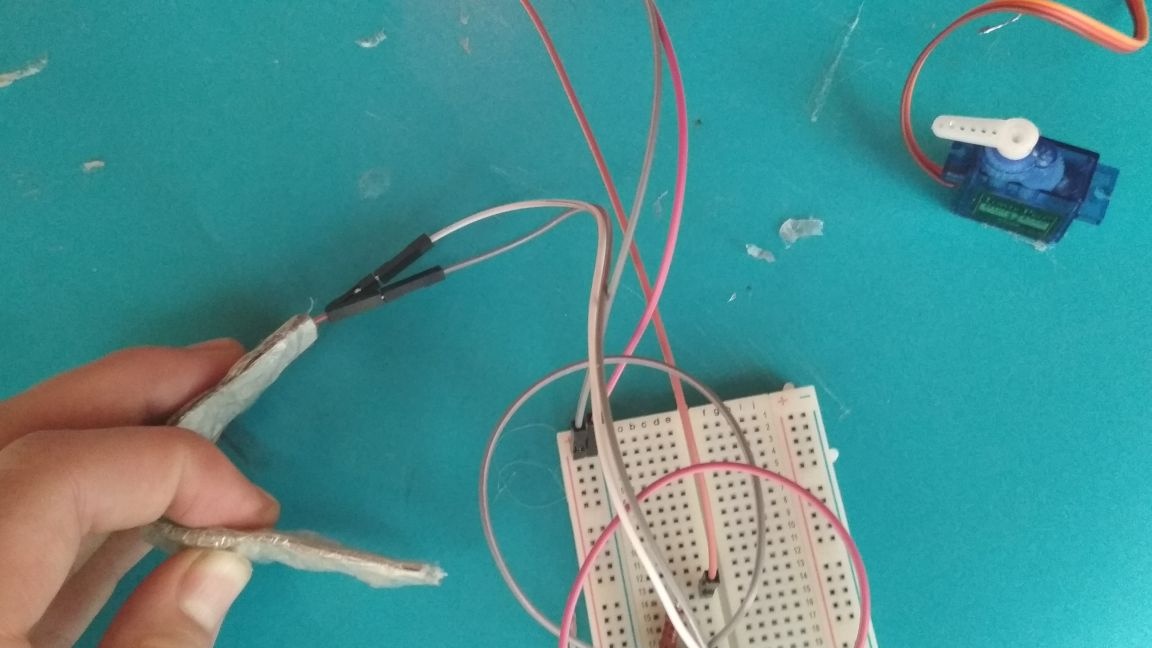
Bereme arduino a připojíme 5V výstup k plusu prkénku a Gnd k minus:

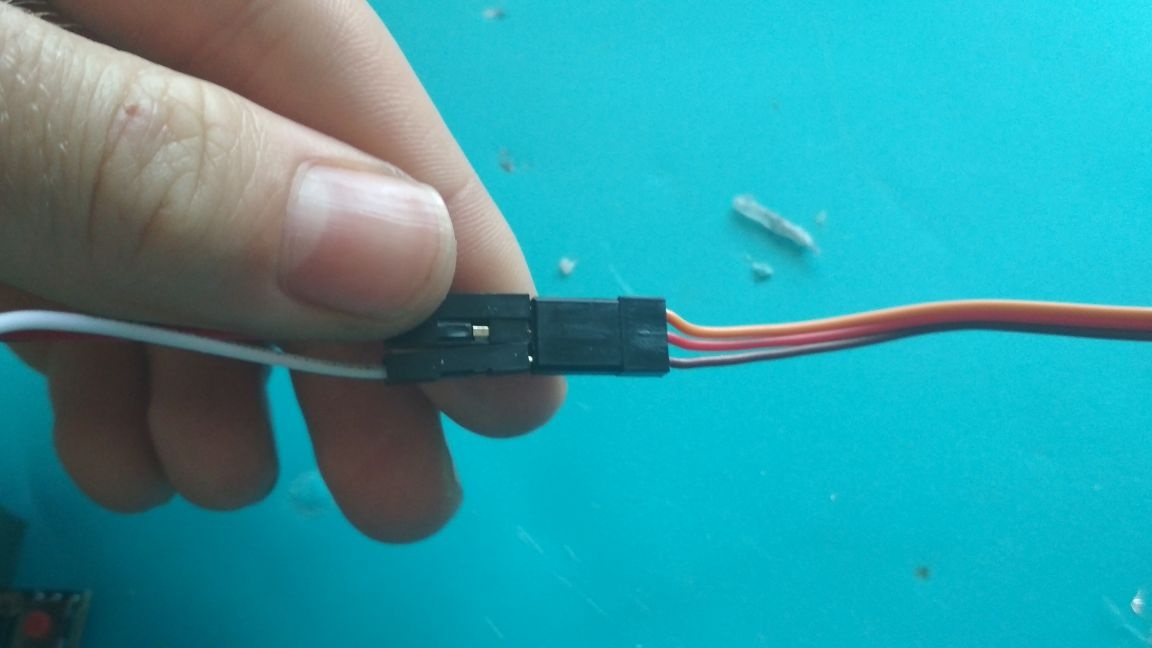
Připojte připojovací vodič k servomotoru a připojte jej k arduinu takto:
Hnědý drát do gnd
červená až 5v
oranžová až 9 pinů
K našemu senzoru ohybu přidejte dva dráty táty na táty

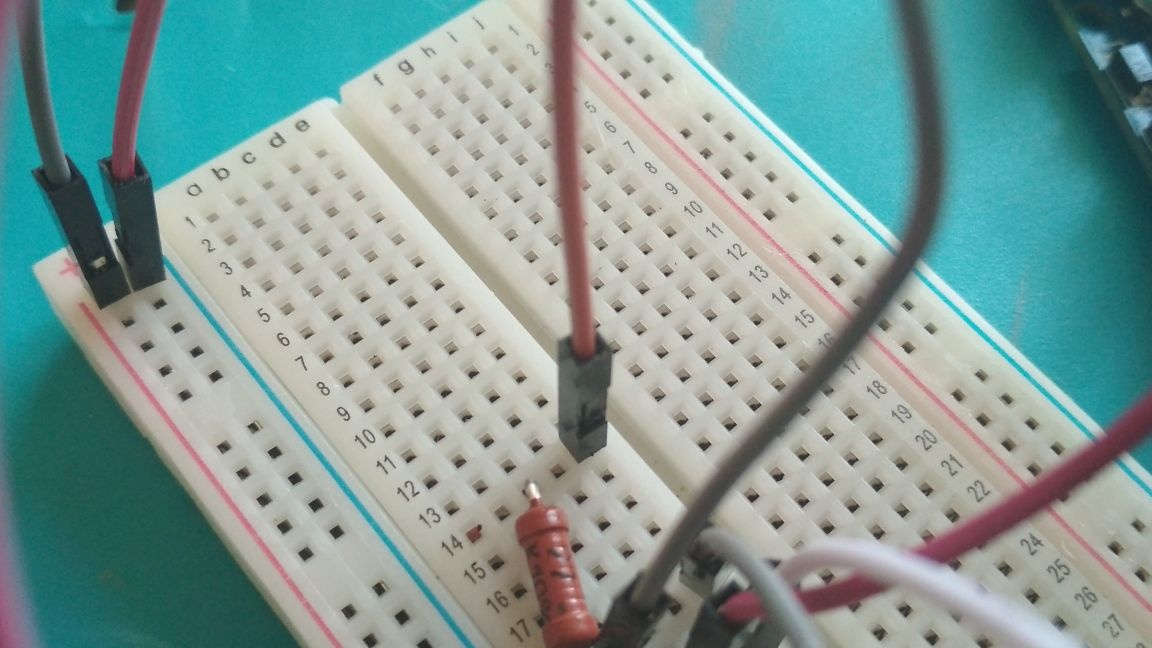
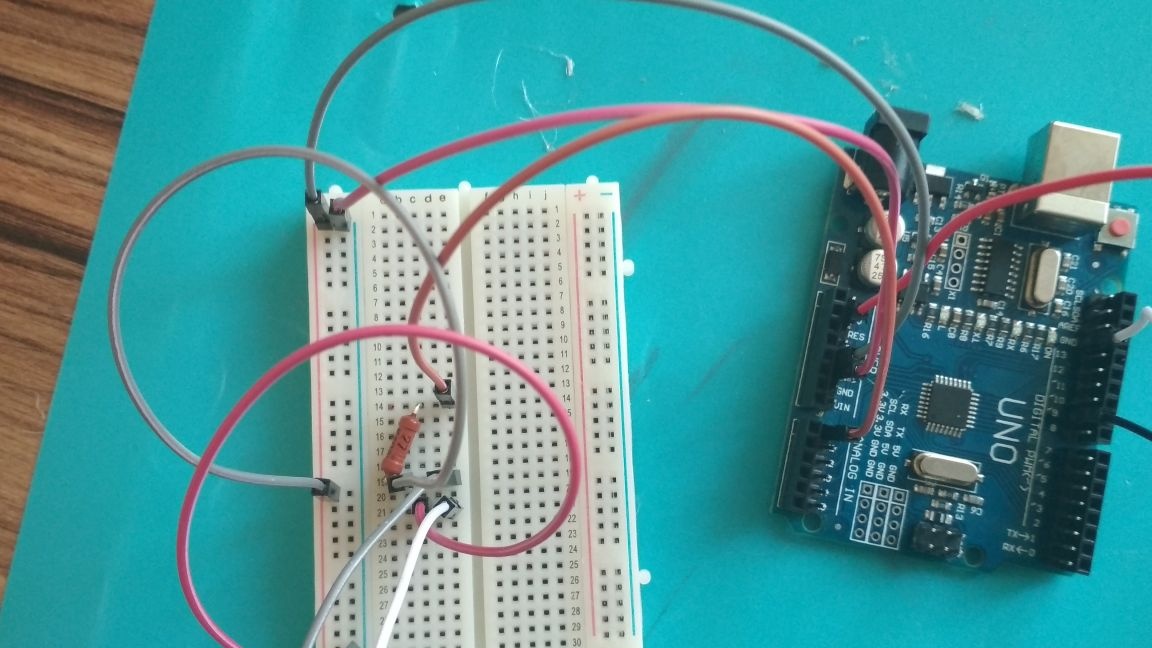
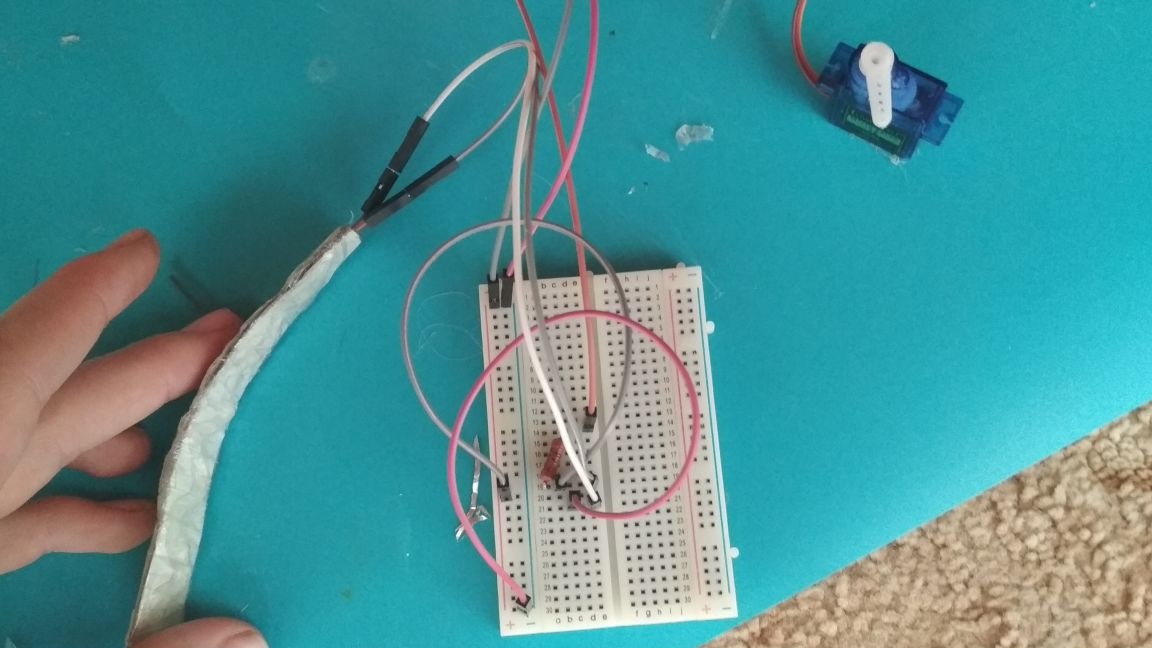
Připojte je k prkénku:
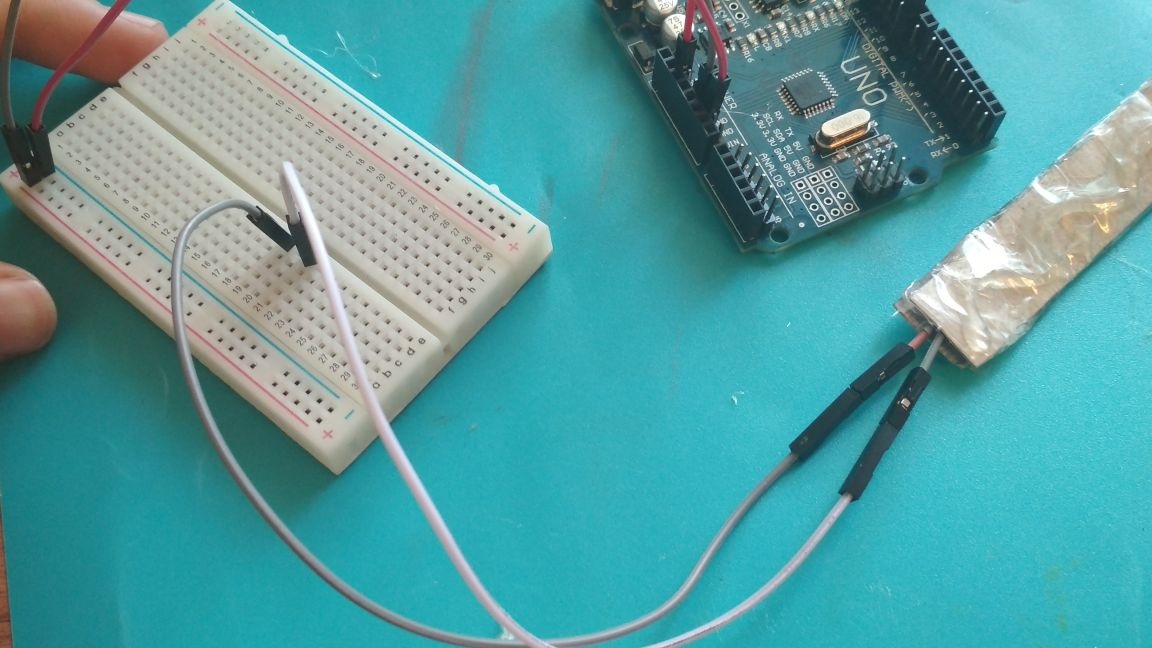
Jeden z konců senzoru je připojen k plusu prkénku přes rezistor 22 kilo-ohm (bohužel jsem jej smíchal a připojil k jinému výstupu, ale to nereagovalo na provozuschopnost), a druhý k minus:
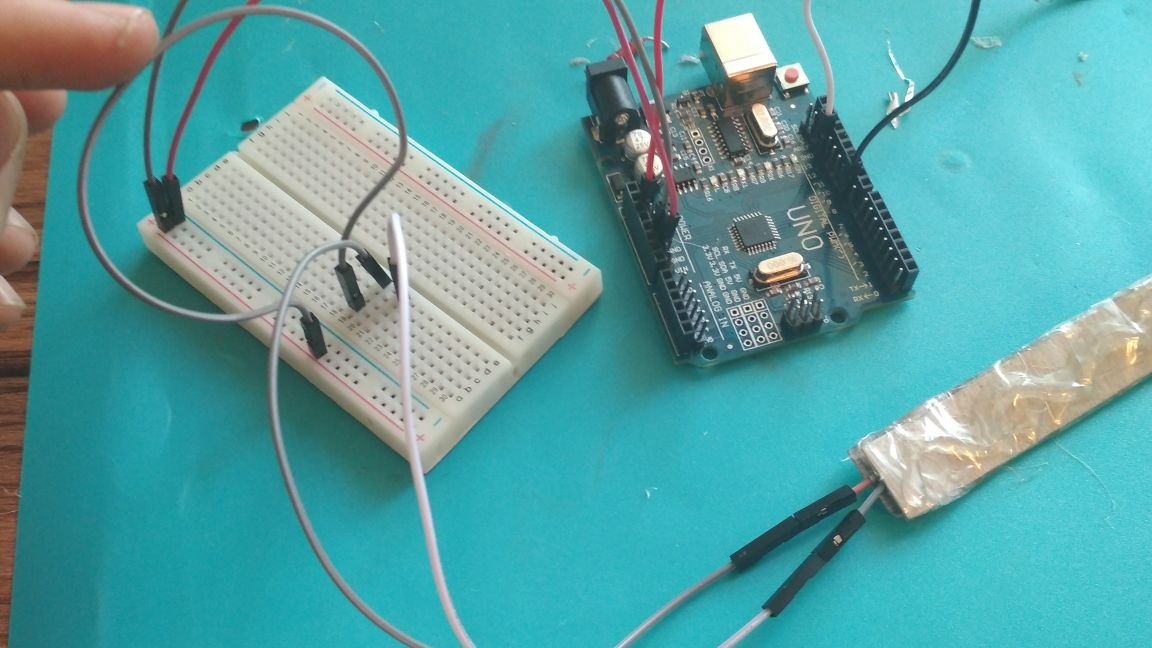
Na linku prkénku, na které je konec senzoru připojen k plusu, přidejte další vodič a vydejte jej na výstup A0 na Arduino:
Nyní připojíme Arduino k počítači, spustíme Arduino IDE a do něj načteme následující skicu:
#include
Servo servo1;
const int flexpin = 0;
neplatné nastavení ()
{
Serial.egegin (9600);
servo1.attach (9);
}
prázdná smyčka ()
{
int flexposition;
int servoposition;
flexposition = analogRead (flexpin);
servoposition = mapa (flexposition, 1018, 1023, 0, 90);
servoposition = omezení (servoposition, 0, 90);
servo1.write (servoposition);
Serial.print ("sensor:");
Serial.print (flexposition);
Serial.print ("servo:");
Serial.println (servoposition);
zpoždění (1000);
}Zapněte monitor portu, ke kterému je připojen Arduino, a načtěte náčrt

Nyní sledujeme změny, ke kterým dochází v monitoru portů, když se náš senzor ohýbá, vidíme, že 1023 je 90 stupňů a 1020 a 1019 jsou 0, takže v mém případě změním číslo 1018 v náčrtu na 1020, můžete mít jiné. Nyní 1020 je 0 stupňů a 1023 je 90 stupňů. Po všech změnách nahrajte novou upravenou skicu na desku Arduino


No, to je vše! Náš nejjednodušší a nejdůležitější levný snímač ohybu je připraven!
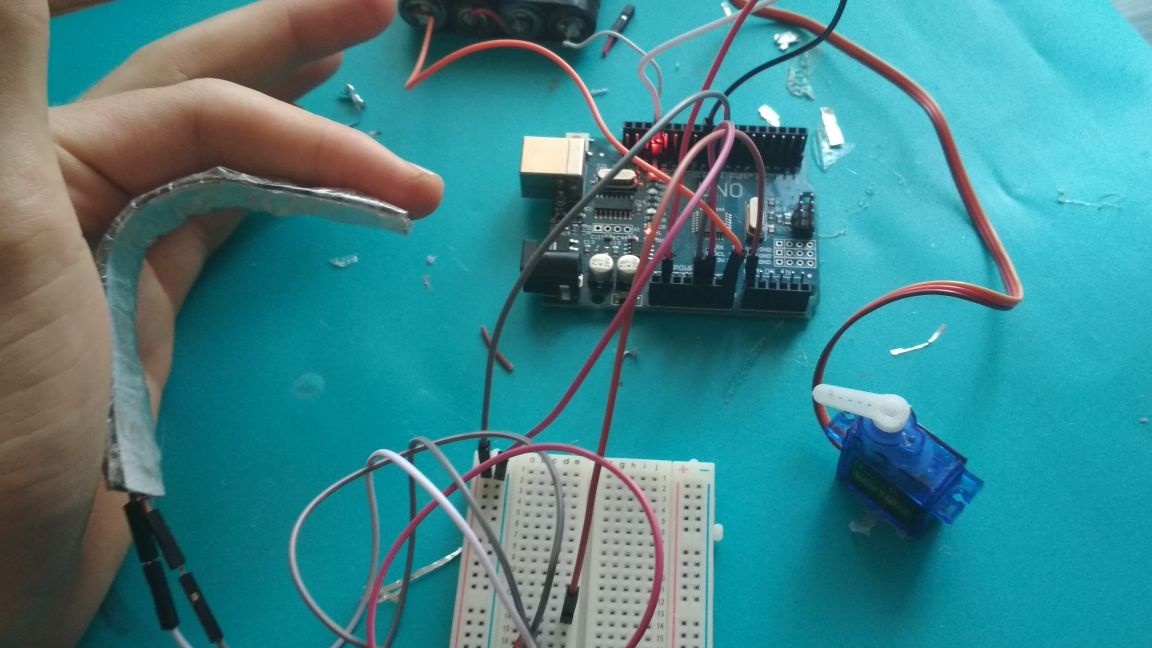
Pokud je vše provedeno správně, pak při ohnutí senzoru se servopohon otočí o 90 stupňů a po vysunutí se vrátí do své původní polohy. Přesnost tohoto senzoru je samozřejmě nižší než u zakoupeného, ale je vhodná pro projekty, které nejsou nijak zvlášť zmatené, a kromě toho, pokud je vše provedeno pečlivě a vyladěno, dopadne téměř tak, jak bylo zakoupeno. Doufám, že tento článek je pro někoho užitečný.
Děkujeme vám všem za pozornost!