Dnes se chci podělit o své další domácí. Je založen na Lego a Arduino. K ovládání použijeme dálkové ovládání s vysílačem 433 MHz. Tentokrát jsem chtěl závodit auto. Pokračovat:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- rádiokomunikační modul 433 MHz
- Motorový reduktor 200 ot / min, s průměrem hřídele 3 mm
- 2 LED diody
- 2 odpory 150 ohmů
- Kondenzátor 10v 1000uF
- 2 jednoradové hřebeny PLS-40
- 2 konektory PBS-20
- Induktor 68mkGn
- 6 baterií NI-Mn 1,2 V 1000 mA
- Konektor táta-máma dva kolíky na drát
- Homutiku
- dráty různých barev
- pájka
- Rosin
- páječka
- Šrouby 3x40 a matice a podložky pro ně
- Šrouby 3x20
Krok 1 sestavte případ.
Je nutné sestavit náš stroj podle pokynů Lego 42022 druhou možnost s určitým zdokonalením. Provádíme všechny akce od strany 3 do 6. Nepotřebujeme převodový mechanismus. Motor Lego také nemusí být montován. Budete však potřebovat úchytky motoru shromážděné na stranách 14-19, s výjimkou převodových stupňů a hřídelí. Dále shromažďujeme vše od stran 20 až 74, s výjimkou páky na straně 25.
Krok 2 mechanizujte tělo.
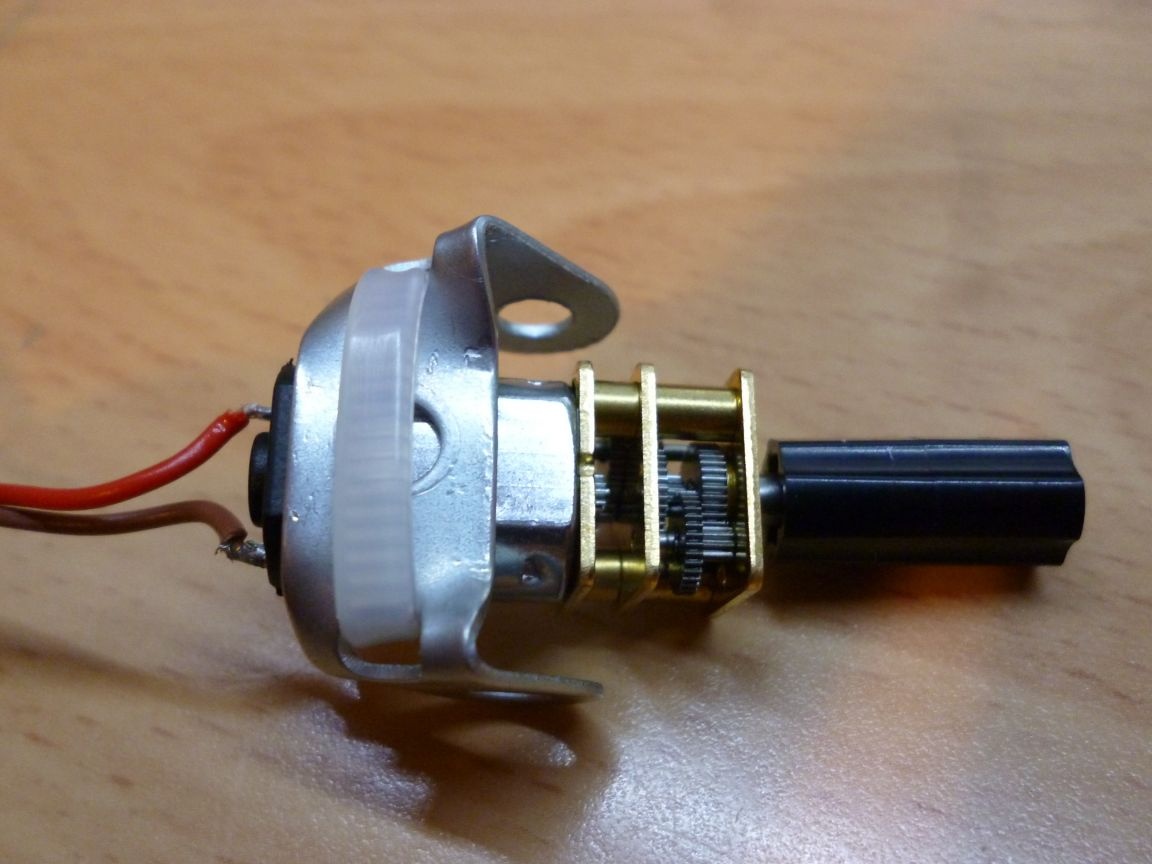
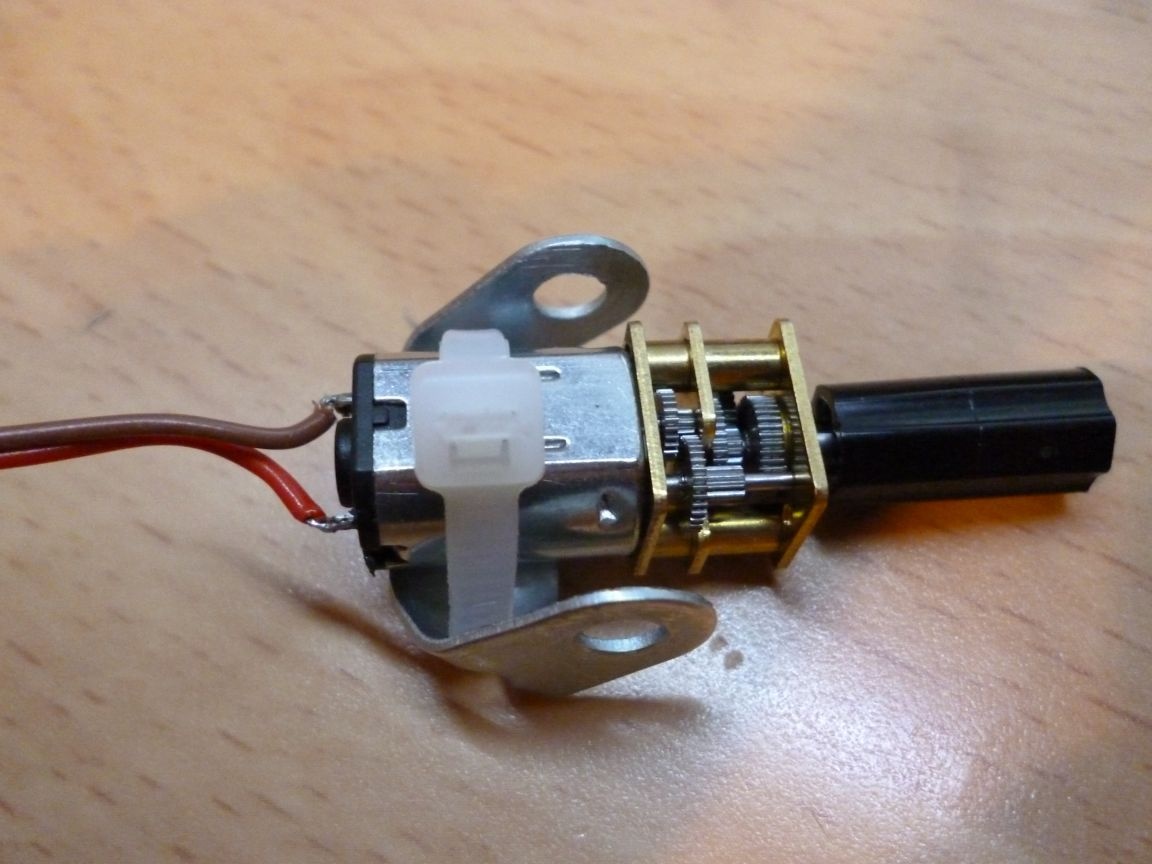
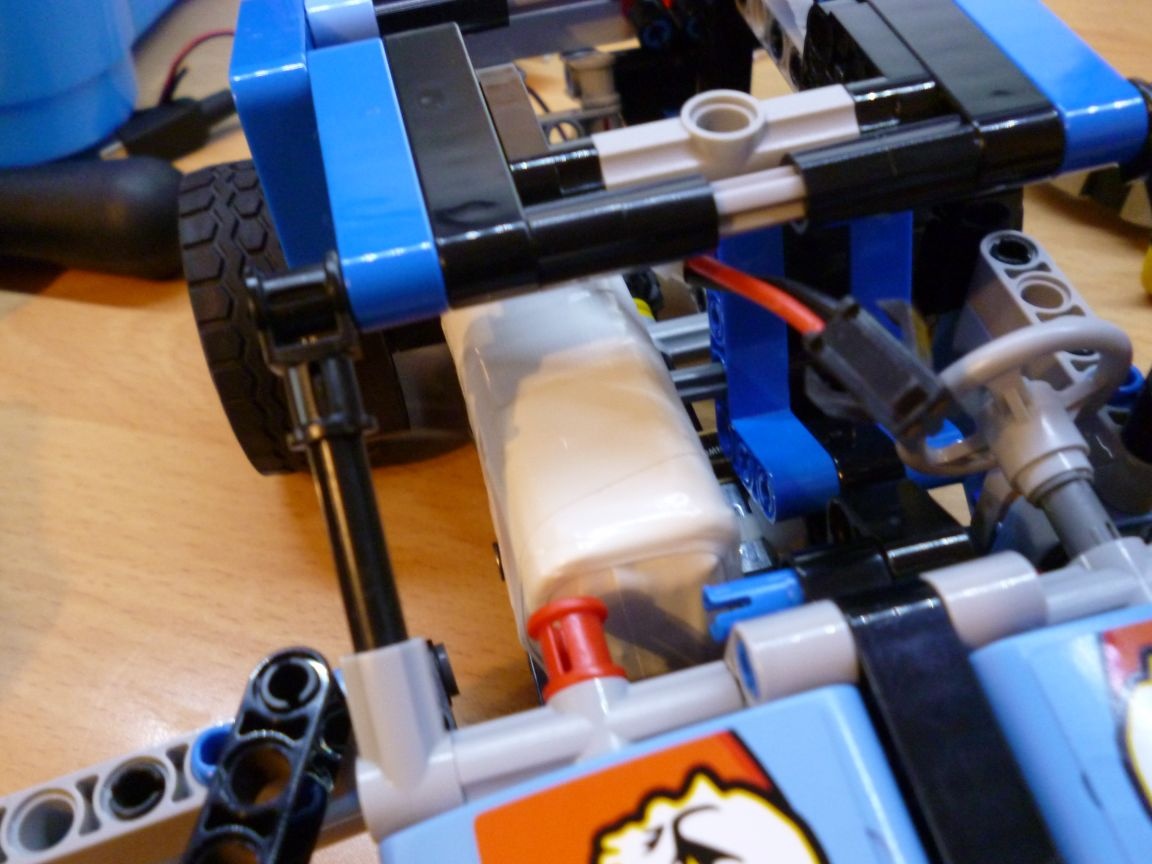
Uveďte do pohybu náš model tam bude převodový motor s rychlostí 200 ot / min. Lze použít s jiným převodovým poměrem. Ale podle mého názoru je to nejlepší volba. Při 100 ot / min - příliš pomalých, 300 ot / min - není dostatek energie a motor je velmi horký. Na hřídeli převodového motoru je nutné nasadit spojovací pouzdro „Legovskaya“ a zajistit jej proti otáčení ořezáním zápalkou. K upevnění našeho motoru na model je nutné ohnout díl od kovového konstruktéra písmenem „P“ a připevnit převodový motor k desce pomocí svorky. Výsledkem by mělo být toto:
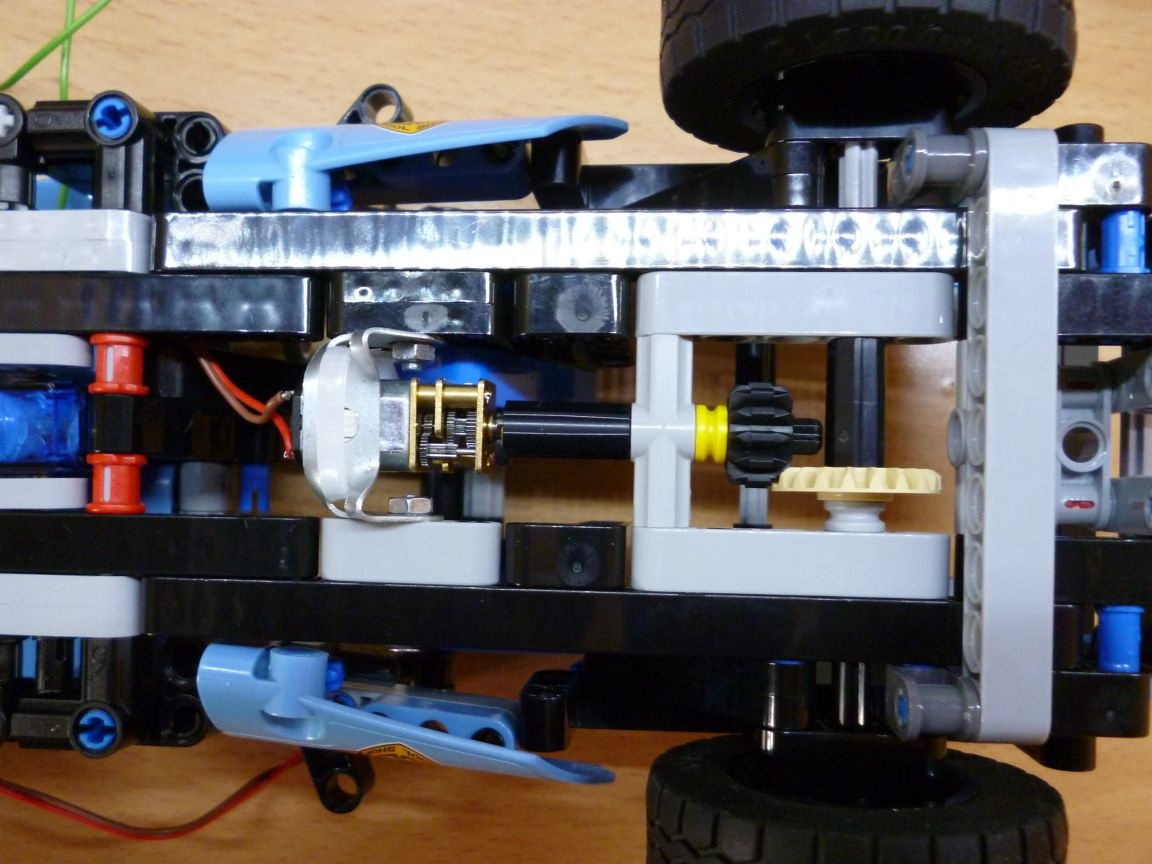
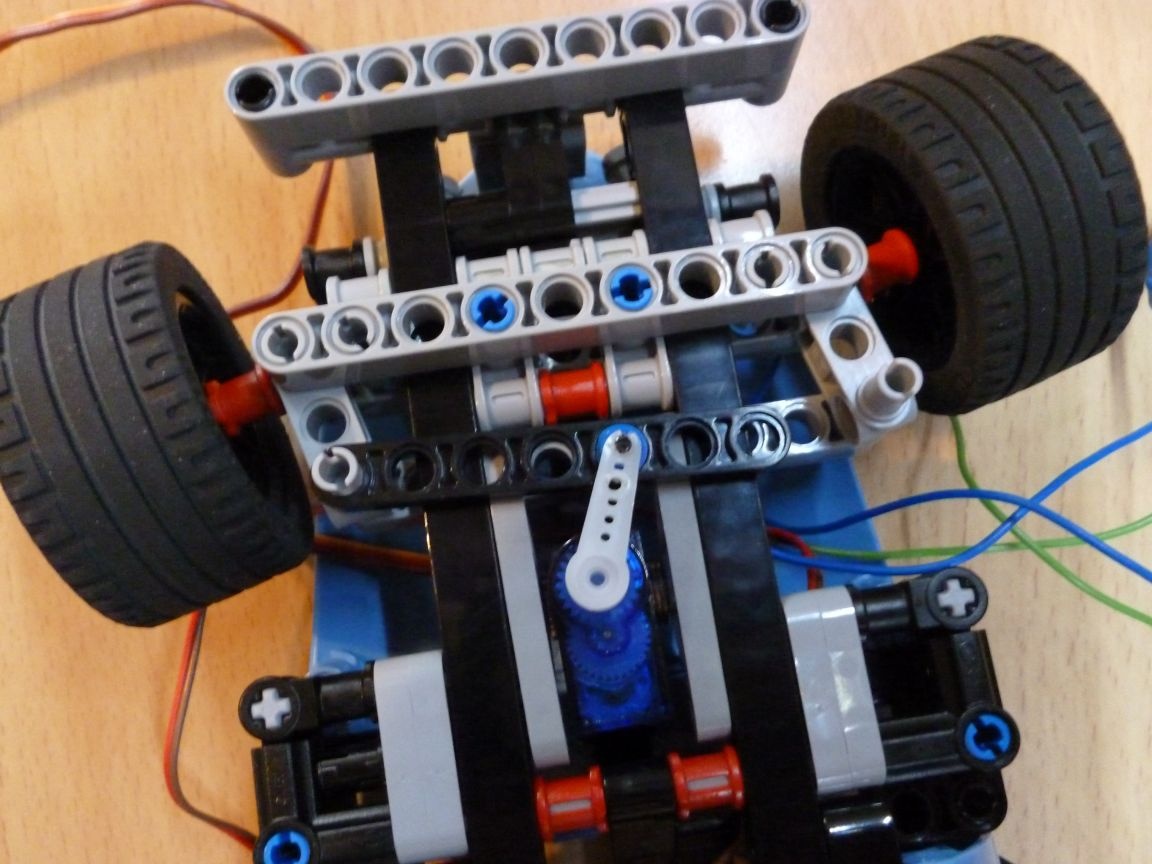
Pomocí 3 x 20 šroubů připevníme náš motor k modelu. Neutahujte příliš mnoho! Jinak byste mohli poškodit konstrukční díly Lego. Na modelu to vypadá takto:
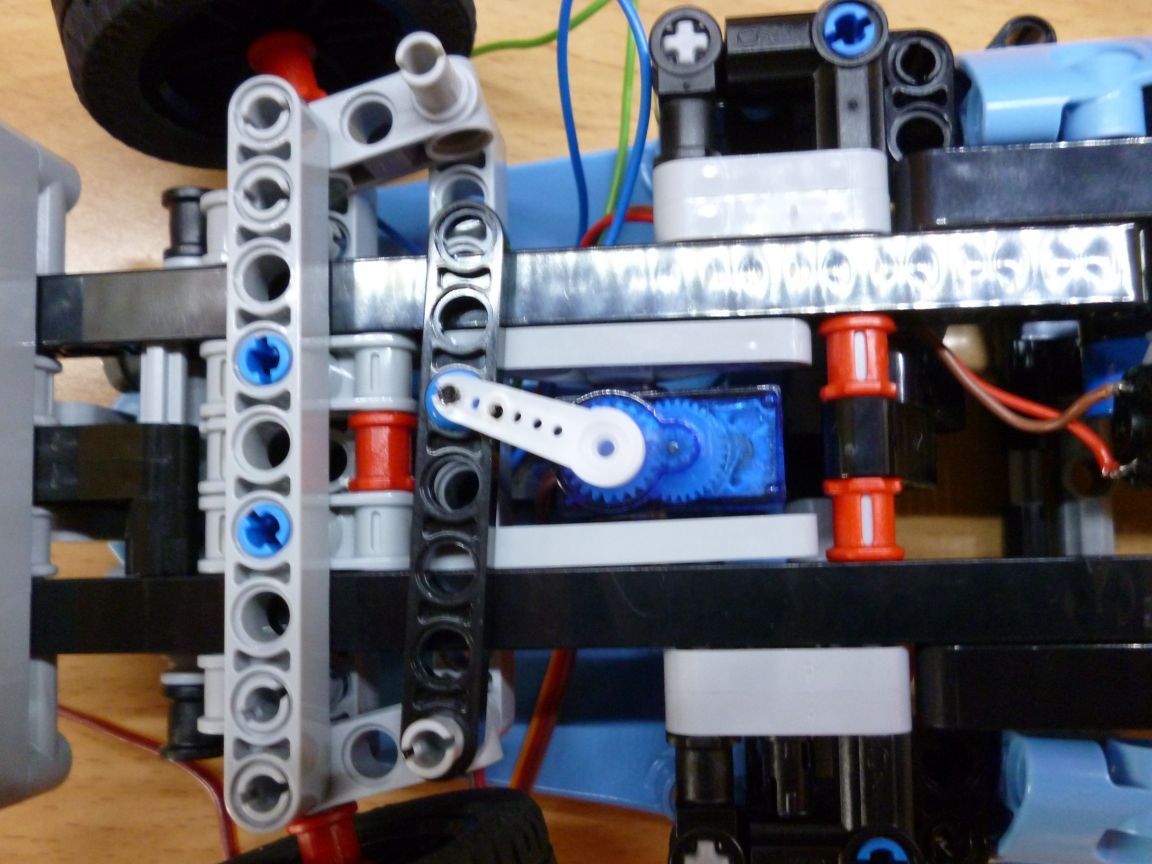
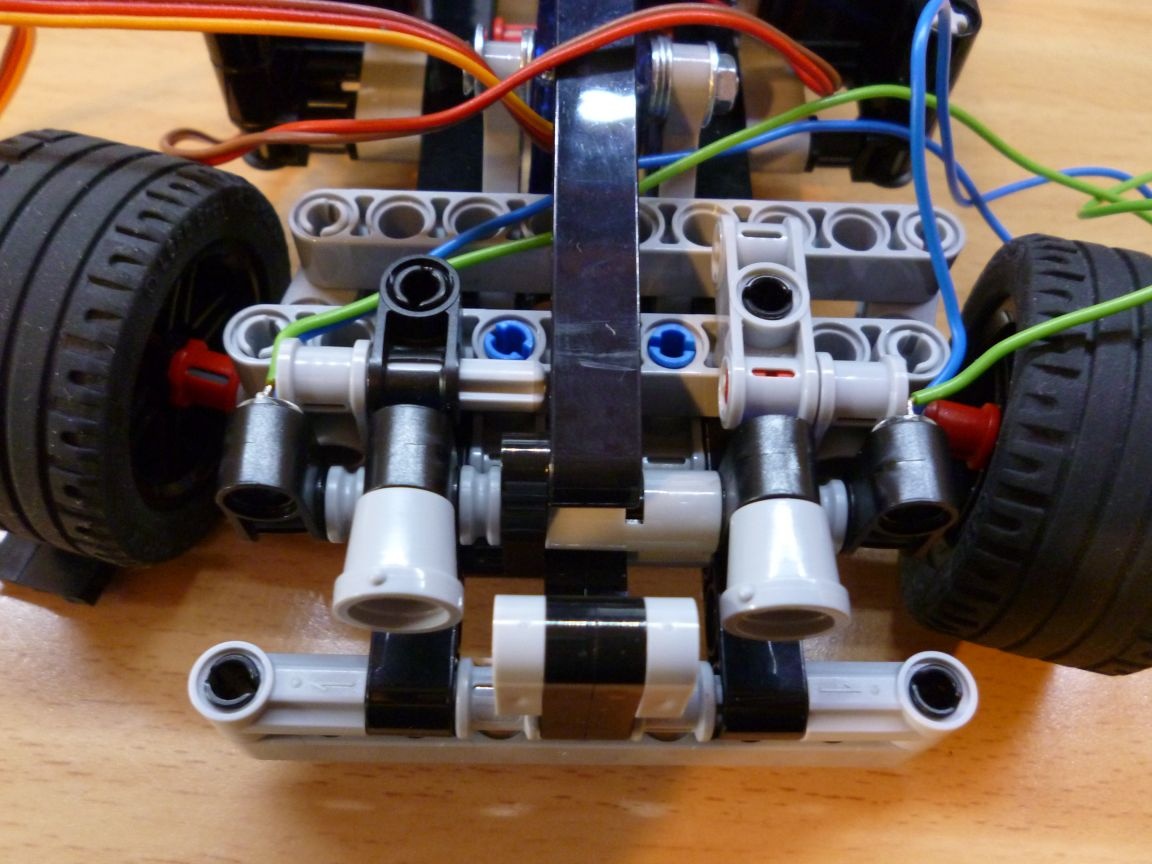
Chcete-li provést tah, vezměte mírně upravené servo SG-90. Pouzdro musí být pečlivě vyvrtáno, aby se nedotýkalo vnitřních částí, průchozího otvoru o průměru 3,2 mm nebo jednoduše řezaného stacionárním nožem.

Do vytvořeného otvoru vložíme šroub a na okrajích položíme trojúhelníkové desky a upevníme maticemi. Umístili jsme páku na servo hřídel a připevnili jsme ji k páce Lego. Na psacím stroji to vypadá takto:
Krok 3 je elektrikář.
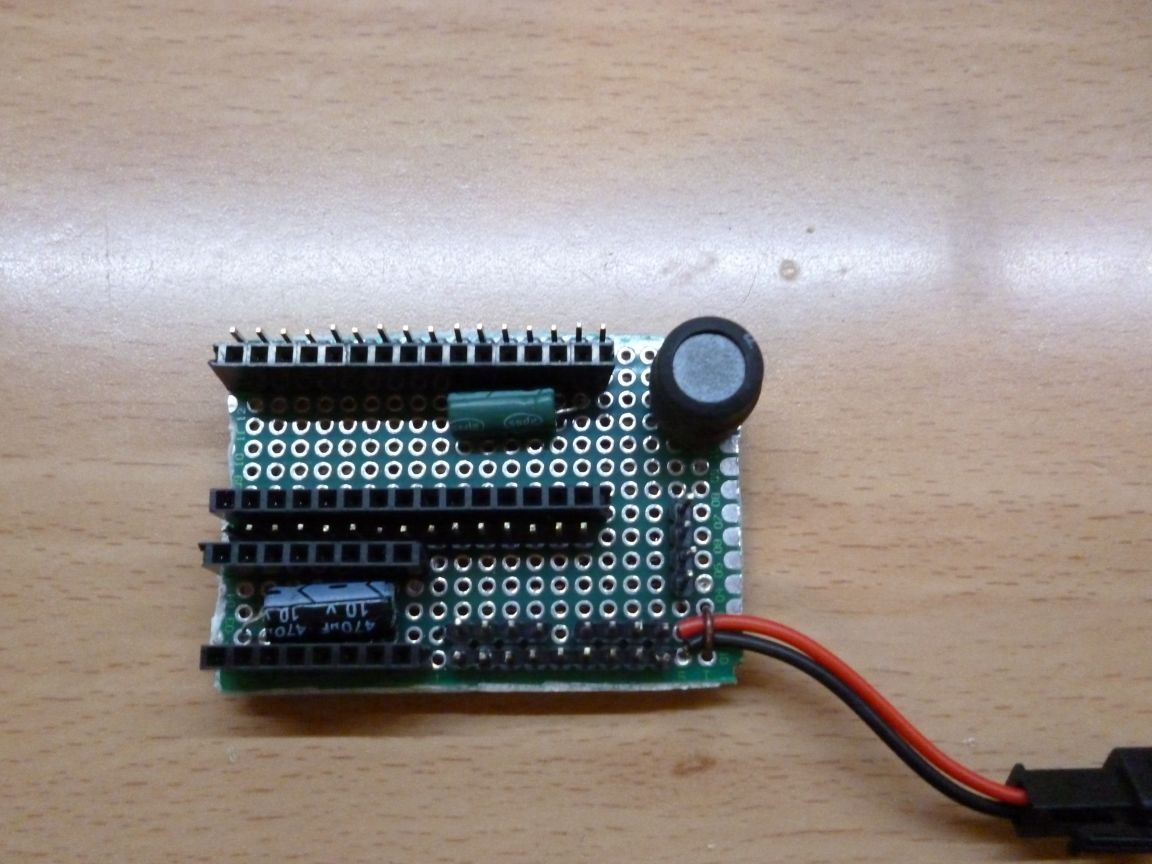
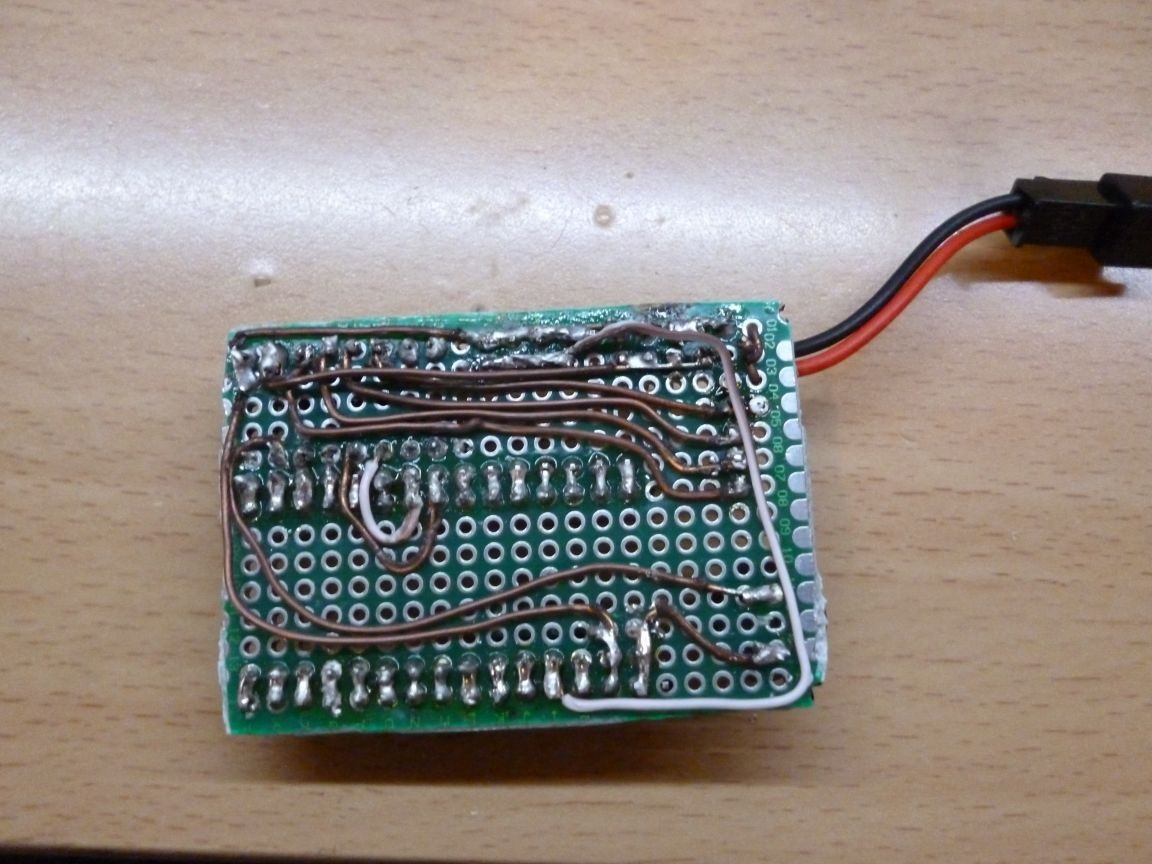
Páječku v ruce a jít. Celá elektrika může být sestavena jednoduše připojením montážních vodičů. To je však nepohodlné, protože to vyžaduje hodně prostoru. Kromě toho existuje vysoká pravděpodobnost špatného kontaktu. Proto je lepší pájet vše na desce plošných spojů podle následujícího schématu:
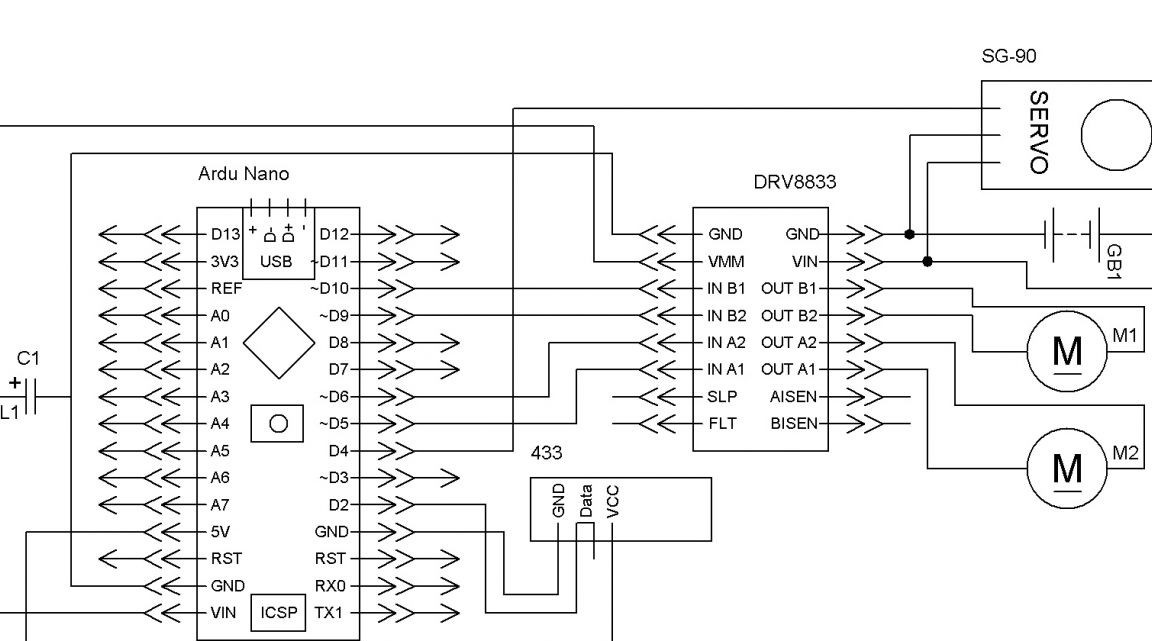
Přinesu trochu jasnosti: můžete vzít jakýkoli nízkoenergetický kondenzátor, můžete také najít induktor všeho druhu, to je nutné ke stabilizaci napětí mikrokontroléru. Anténa musí být připájena k přijímači. Mám následující:
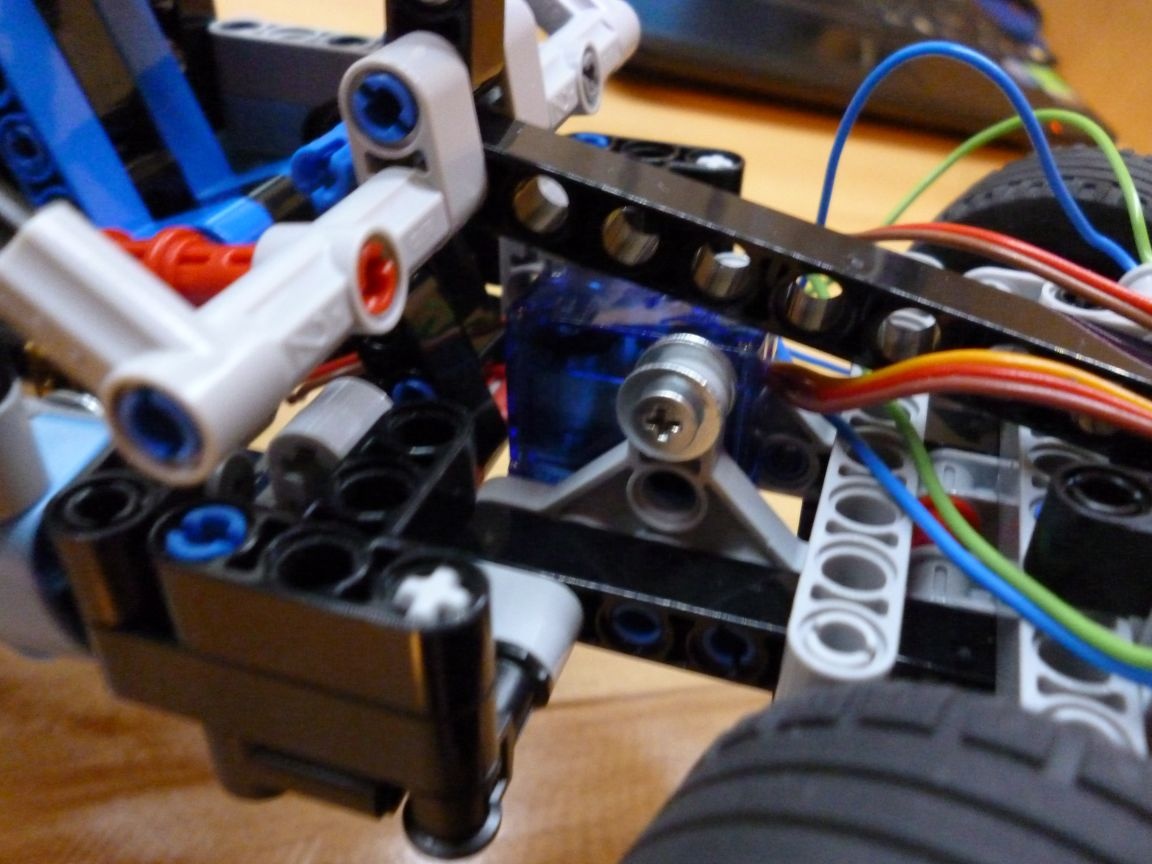
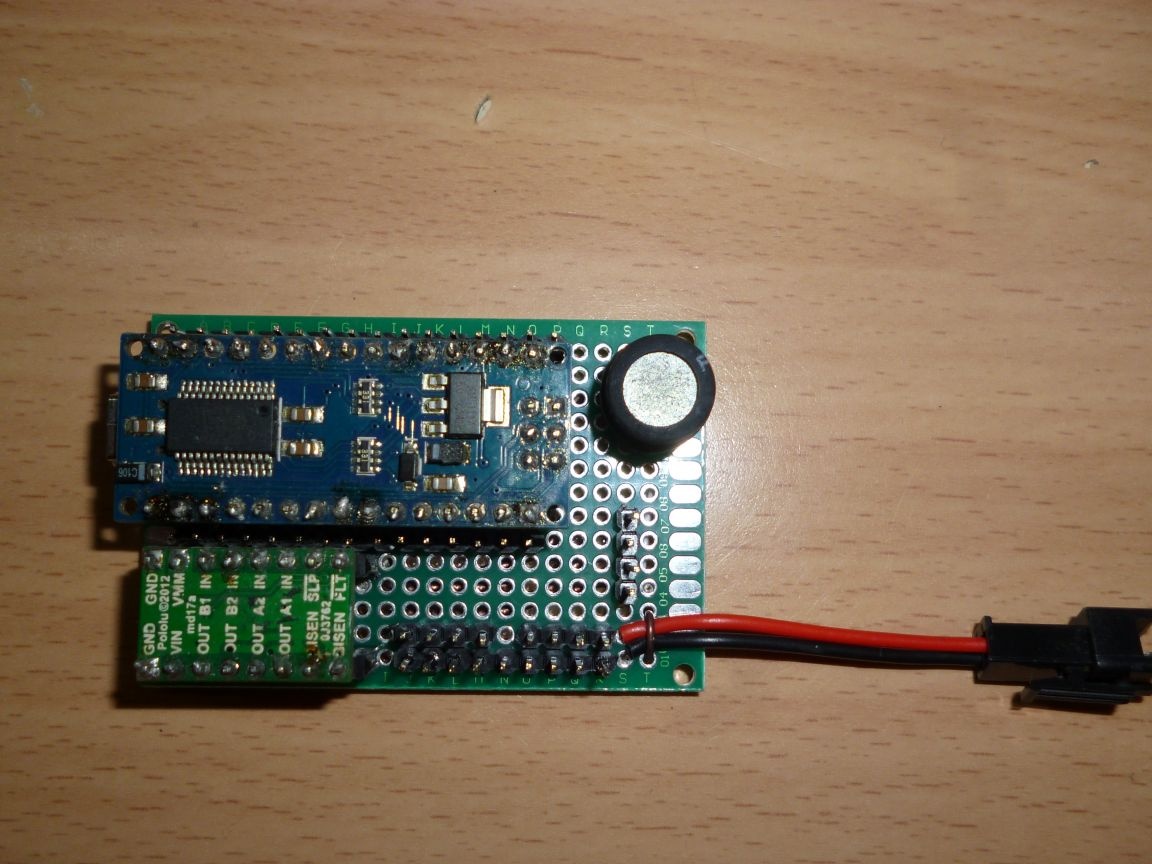
Umístili jsme Arduino Nano a DRV 8833 na jejich místa:
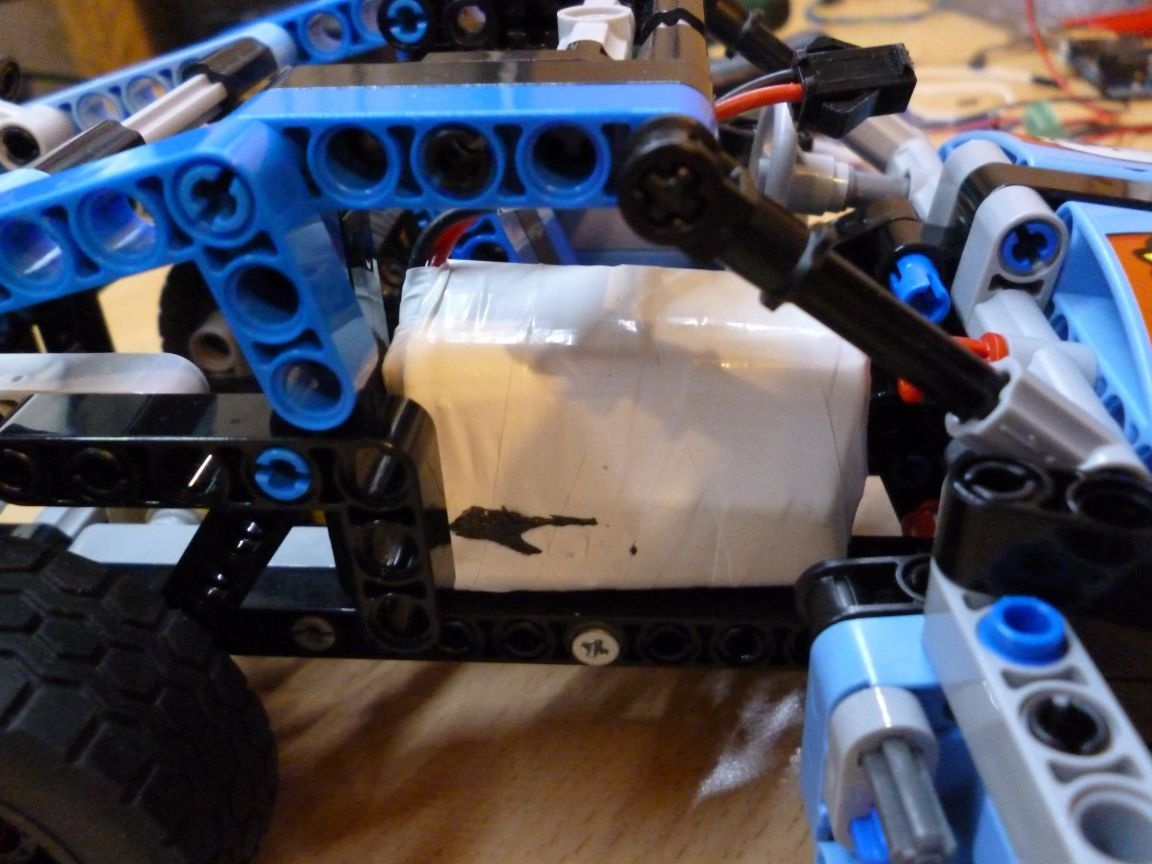
Pro napájení použijeme 6 Ni-Mn 1,2 V 1000 mA baterie, pájené v sérii a navinuté elektrickou páskou. Přilepte je na sedadlo oboustranné lepicí pásky spolujezdce.

Připojujeme vše podle schématu a instalujeme do zadní části stroje. Můžete také přidat několik LED. Vložte je do světlometů a připojte na pin 14 (A2).
Krok 4 firmware.
Pro zápis firmwaru jsem použil Arduino IDE. Aktuální verze v době psaní je 1.8.1. Je vhodné implementovat komunikační protokol pomocí modulu 433 MHz pomocí knihovny rc-switch-2.52. Musíte si ji stáhnout a přidat do složky „knihovny“ Arduino IDE.
Připojíme Arduino a flashujeme s následujícím firmwarem:
K testování výkonu našeho modelu potřebujeme druhou desku Arduino. K druhé desce je nutné připojit rádiový vysílač 433 MHz. Vysílač je připojen následujícím způsobem:
VCC (vysílač) do 5+ (Arduino),
GND na GND,
DATA až D10.
Sem napište upravenou náčrtu SendDemo. Je to v příkladech v knihovně, kterou jsme nainstalovali, a slouží k odesílání příkazů. Před blikáním skici je třeba ji mírně změnit, konkrétně změnit přenesené příkazy. Podle toho, co potřebujete zkontrolovat, napište do příkazového řádku následující příkazy:
„1“ - pohyb vpřed (napište příkaz bez uvozovek!)
"2" - zpětný pohyb
„15“ - bodka
"3" - otočte volantem doleva
"4" - otočte volantem doprava
"5" - nastavit volant uprostřed
"10" - zapněte světlomety
"11" - vypněte světlomety
Dálkové ovládání pomocí rádiového vysílače 433 MHz je téma samostatného článku. Určitě budu psát pokyny pro výrobu takového dálkového ovladače.
Chci říci, že tato možnost je vhodná pro téměř všechny modely automobilů Lego. Stačí spojit všechny mechaniky a najít místo pro tabuli. A pokud zahrnete fantazii, můžete mechanizovat jakýkoli model.