

Autor založil tento projekt na jednodušší verzi. domácí lodě, a zdokonalil to. Senzory jsou umístěny v lodi, aby se zabránilo překážkám a pohybovaly se ve světle. Jak se používá ovladač v lodi Arduino, v přední části je nainstalován ultrazvukový senzor a světelné senzory jsou umístěny po stranách. Tato jednoduchá loď nepadne do zdí a je ovládána baterkou.
Materiály a nářadí:
- Izolační páska / lepicí páska
- Termoglue s horkým lepidlem
- Stejnosměrné motory 2 ks
- Plastové láhve 2 ks
- dráty
- Malé vrtule 2 ks
- Arduino, počítač a kabel USB
- Plastová krabička
- 9V baterie a konektor
- výkonové diody (typ 1N4004)
- Odpory
- Tranzistor MOSFET nebo TIP 120
- Dvě fotobuňky a dvě tlačítka
- nůžky
- Pájka s páječkou

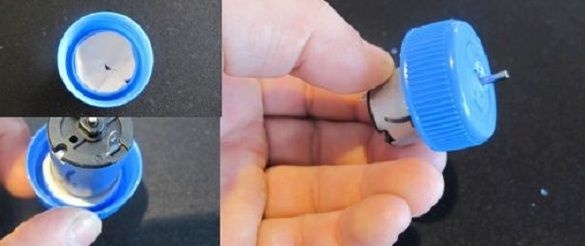
Krok 1. Instalace motorů.
Víčka se z lahví odstraní a v každé z nich se vytvoří otvor. Uvnitř obálky autor vymačkává horké lepidlo bez uzavření děr. Umístil hřídel motoru do otvoru a položil na lepidlo. Po zaschnutí lepidla se hřídel volně otáčí. Stejný postup nastává u druhého krytu.
Krok 2. Připevnění lahví.
Lahve byly k sobě připevněny na principu voru pomocí tří proužků lepicí pásky.

Krok 3. Pájení na motory.
Protože motory namontované v zástrčkách neměly dráty, bylo nutné je pájet, délka drátů byla asi 25-30 cm.

Krok 4. Řez do lahví.
Aby dráty padly do trupu lodi, je z jejich horní strany vytvořen malý otvor.

Krok 5. Zajištění motorů.
Autor dále krouží víčka na lahvích, protože se neotáčely dobře, musel jsem použít horké lepidlo. Dráty jsou protlačeny připravenými otvory na lahvích.

Krok 6. Případ.
Plastová krabička se drží na dvou lahvích. V této kapacitě pro elektroniku můžete vytvořit otvory pro dráty nebo držet dráty skrz zadní část krabice. Otvory pro dráty na lahvích jsou izolovány tavným lepidlem.

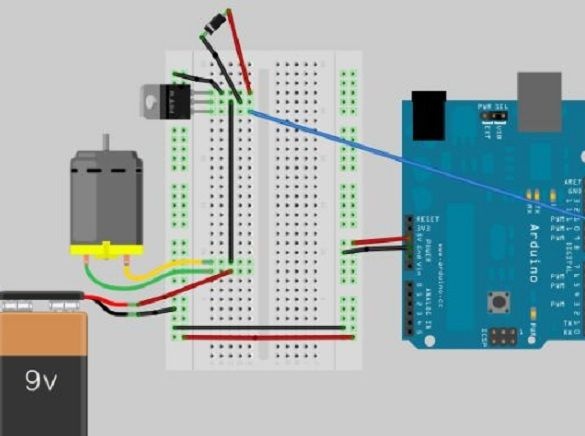
Krok 7. Schéma zapojení.
Obvod používá jako přepínač tranzistor TIP 120 (můžete použít podobné tranzistory MOSFET nebo Darlington). Používá se k přepínání zátěže, když spotřebovává velké množství proudu, protože Arduino nemá dostatek energie pro motory. Tento obvod je sestaven pro první a poté pro druhý motor (pro druhý motor není potřeba jiná baterie).
Krok 8. Senzory.
Ultrazvukový senzor je skvělý pro přední část lodi, varuje před překážkami na cestě. Fotočlánky fungují jako antény a používají se k tomu, aby loď vznášela světlo.Tlačítka na bocích slouží jako překážková čidla. Můžete také upravit kód a použít další senzory, například infračervené.

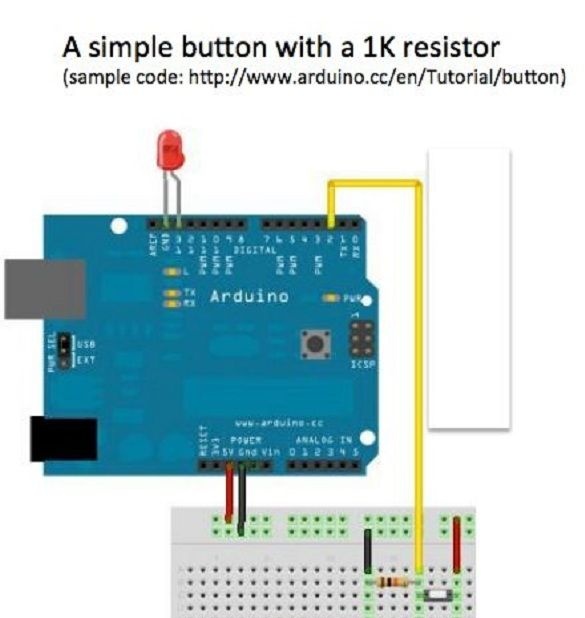
Krok 9. Schémata pro senzory.
Schéma ukazuje připojení jednoduchého tlačítka a 1K rezistoru. Schéma pro obě tlačítka se opakuje, tlačítka jsou umístěna na obou stranách lodi. Budou odpovědní za změnu pohybu lodi při srážce.
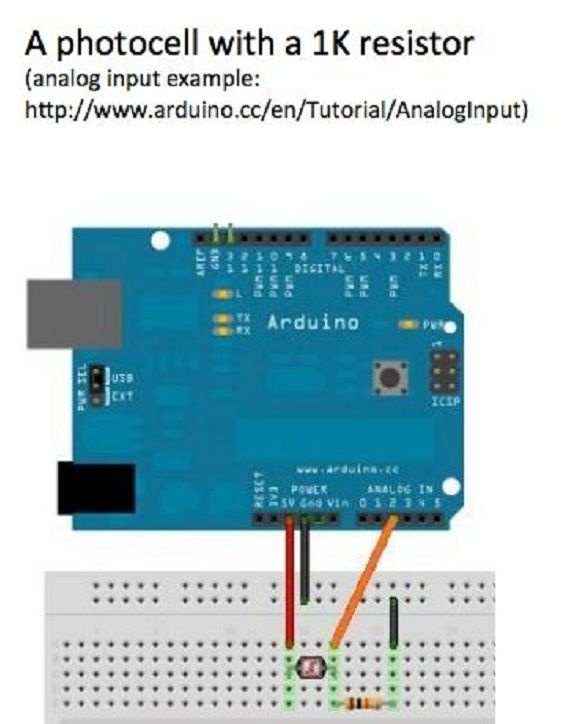
Následující obrázek ukazuje obvod s odporem 1K a fotobuňkou. Autor to provedl dvakrát a umístil fotobuňky na opačné strany lodi.
Krok 10. Programový kód.
Autor poskytl příležitost stáhnout si svůj kód pro použití, čímž poskytl základní funkčnost těm, kteří sestaví takovou loď. Kód zahrnuje podporu fotobuněk, dálkoměru a tlačítek. Loď se bude snažit vyhýbat se překážkám před sebou a otáčí se v opačném směru, když narazí na překážky ze strany. Pokud není potřeba používat celou sadu senzorů, ale pouze některé z nich mají kód pro každý zvlášť. Můžete si stáhnout všechny kódy pod článkem.
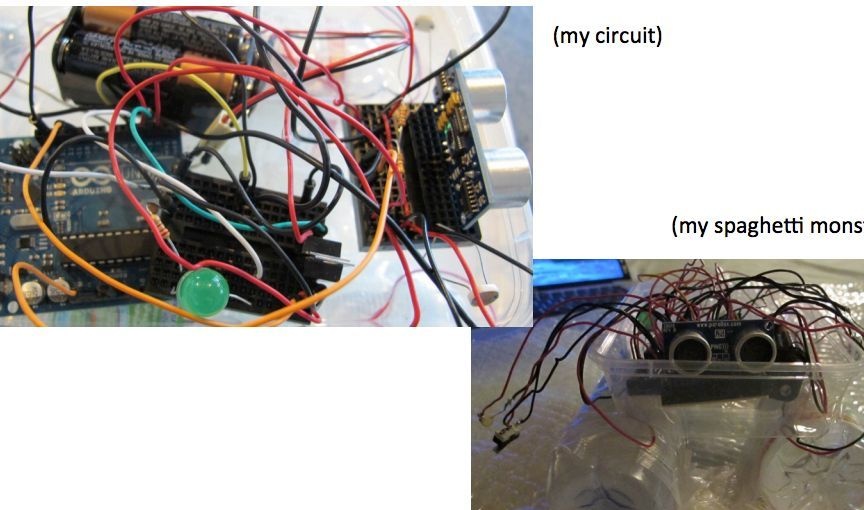
Krok 11. Sestavení lodi.
Montovaný obvod, Arduino a baterie jsou v krabici.
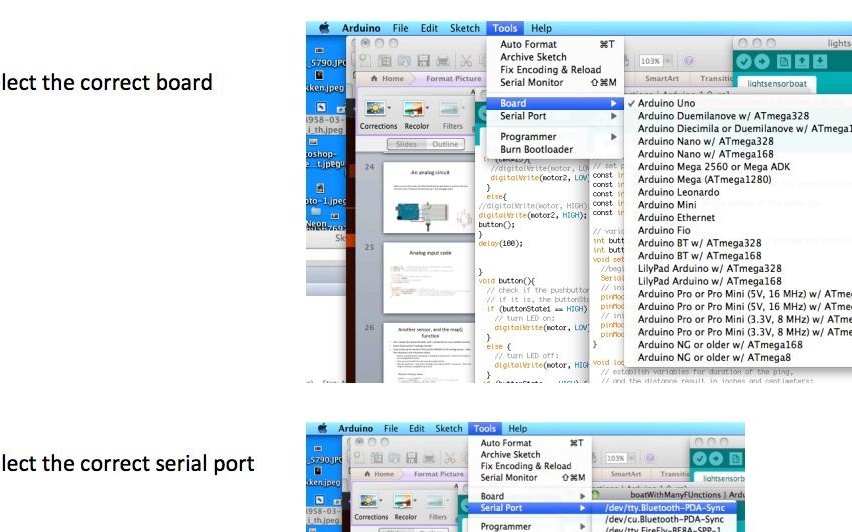
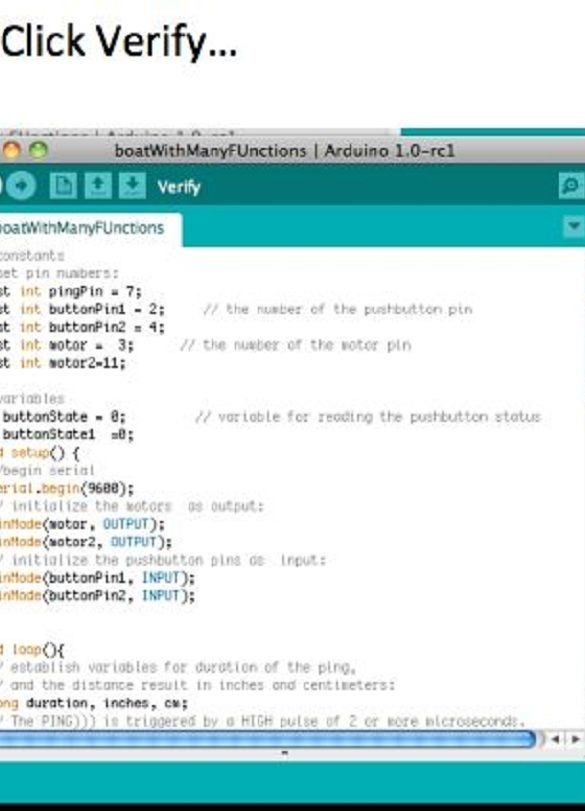
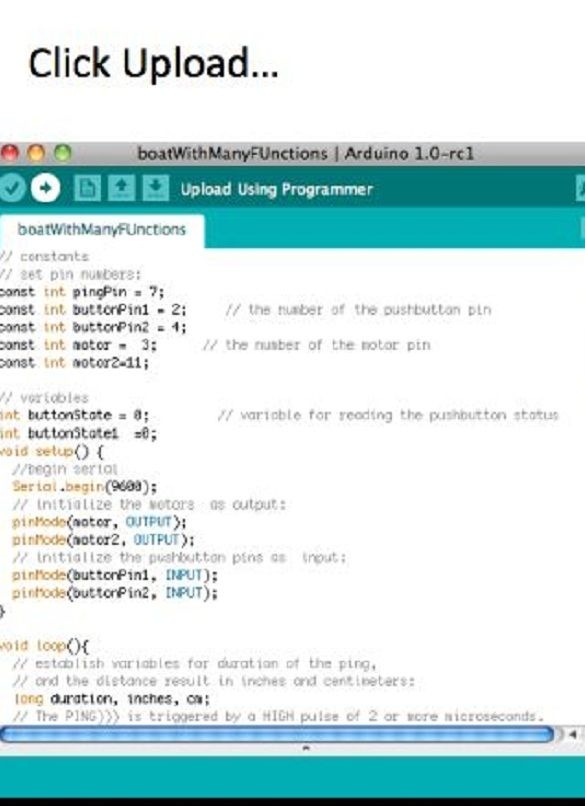
Krok 12. Stáhněte skicu.
Poté se otevře Arduino IDE, vybere správný soubor a port, po kterém autor kompiluje a nahraje kód do řadiče.
Krok 13. Odolnost vůči vodě a zkouška.
Autor navíc izoloval všechna potenciální místa vniknutí vody horkým lepidlem. Také izolovaly všechny vodiče od zkratu. Nádoba s Arduino je pokryta stejnou krabicí a utěsněna elektrickou páskou. K motorům jsou připojeny vrtule. Zde je loď připravena, nyní můžete začít zkoušet na vodě.



Video s předběžným testem lodi: