
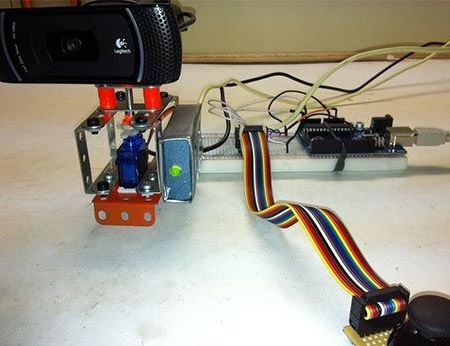
Tento článek bude hovořit o tom, jak používat Arduino může ovládat webovou kameru. Přesněji řečeno, ovládací prvek bude servopohon, který je nainstalován v rámu od návrháře, na který bude webová kamera již namontována.
Materiály použité autorem k vytvoření tohoto zařízení:
1) kovový konstruktér
2) svařování za studena
3) webová kamera
4) servo
5) LED diody
6) Arduino
8) joystick od PS3
Podrobněji zvažte návrh a hlavní body vytvoření zařízení pro ovládání kamery.
Zmatený otázkou, jak používat tak pohodlnou platformu Arduino kromě standardních funkcí, jako jsou blikající světla. Po rozhovoru s kolegou přes Skype s autorem přišel autor se zajímavým nápadem. Co když dáte svým kolegům příležitost ovládat webkameru a sledovat, co se děje v kanceláři. Dříve neřekl než udělal, a autor začal práce na realizaci této myšlenky.
Autor zpočátku studoval hlavní materiály článků, kde byl joystick použit k ovládání jednotek vytvořených na platformě Arduino. Po pochopení materiálu těchto článků si autor uvědomil, že může použít starý joystick z PS3 k ovládání pohybů serva od něj.
Začal se stavět, autor se rozhodl postavit rám, ve kterém budou umístěny servopohony a samotná kamera. Aby se tento úkol neskomplikoval, autor se rozhodl použít obvyklý kovový konstruktér, který si zakoupil v obchodě thrilleru.
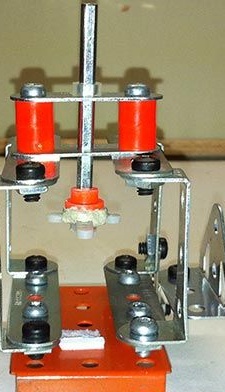
S ohledem na podrobnosti o tomto konstruktoru se ukázalo, že vytvoří takový rámec budoucího zařízení:
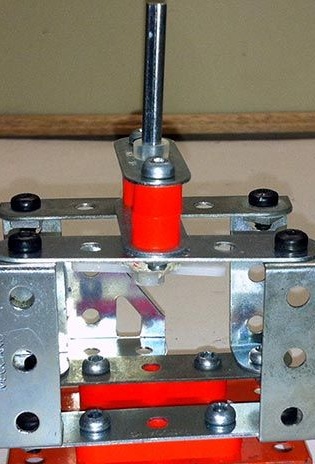
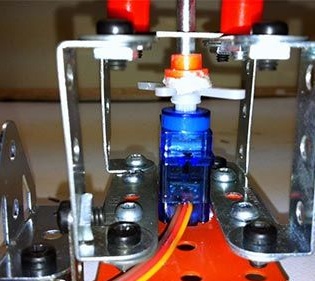
Uvnitř rámu byl nainstalován servopohon. Jak je vidět z fotografie, dokonale zapadá do vytvořeného rámečku. Pro upevnění serva na rám použil autor oboustrannou pásku. Pomocí svařování za studena byl servopohon připojen k převodu, který řídí pohyb plošiny pomocí kamery.
Je důležité zajistit, aby konstrukce převodovky byla provedena dokonce tak, aby nedošlo ke zbytečnému zatížení.
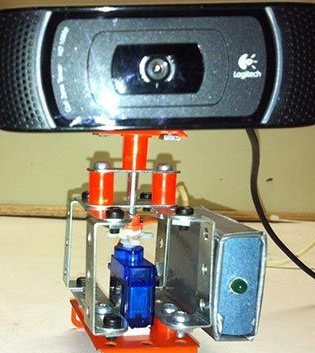
Poté autor začal instalovat webovou kameru. Byla použita kamera Logitech, která se používá v kanceláři společnosti, kde autor pracuje. Proto vzhledem k tomu, že kamera nepatří autorovi, nerozebral ji a neodstranil protiváhu, ačkoli by to zjednodušilo konstrukci budoucího zařízení.

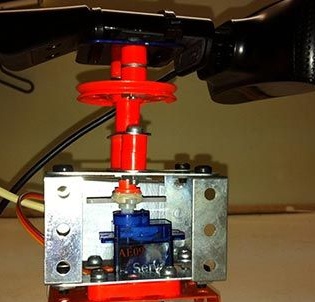
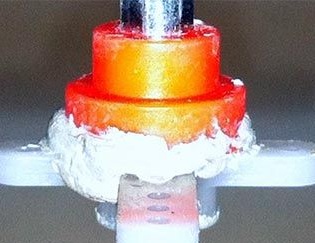
Aby nějak kompenzoval hmotnost kamery a distribuoval ji do středu struktury, použil autor 2 tlustá těsnění. Umožňují přesunout hmotnost komory ze servo hřídele do hlavního rámu a také se vyhnout tlaku hřídele na samotnou komoru.
Kamera je namontována na speciální kulaté plošině, která je založena na hřídeli vycházející ze servopohonu. Tímto způsobem je ovládání kamery realizováno pomocí křížového přenosu.
Poté, co byla připravena mechanická část konstrukce, autor ji převzal e nádivka.
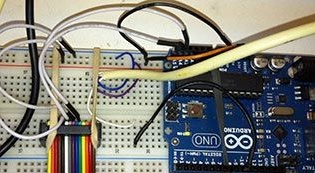
Nejprve se rozhodl připojit serva a LED diody, které ukazují stav systému.
Samotné servo má 3 vodiče: -GND, + 5V a signál. Autor využil 9 pinů k tomu, aby si uvědomil schopnost řídit pohon. Za účelem vytvoření indikátoru povolení pohonu autor nainstaloval diodu, která je připojena ke dvěma vodičům: + 5V a GND s rezistorem na vedení + 5V.

Poté, na základě článků na internetu, autor připravil zlomený joystick z PS3 pro ovládání jednotky.

Poté autor vybral program pro Arduino, díky kterému je možné pomocí joysticku a USB portu ovládat servo. Pro komunikaci s USB portem autor použil ovládání modemu a emulátor aplikačního terminálu, jako je Minicom nebo Putty.
Tento program poskytuje několik funkcí pro ovládání fotoaparátu.
Chcete-li nainstalovat kameru do středu 90 stupňů, musíte stisknout „m“, kamera se také automaticky zapne do této polohy, když je zapnuto napájení serva. Pro otočení kamery doleva je nutné stisknout klávesu „F“ a stisknutím tlačítka „J“ se kamera otočí doprava.
Program si můžete stáhnout na konci článku.
Vzhledem k tomu, že autor konkrétně nevymyslel konstrukci otočného zařízení kamery, začal mít řadu nevýhod.
Například: protože kamera není upevněna v rámu, může při naklonění spadnout z plošiny; protože servo je docela malé, točivý moment kamery vytváří další rotaci, která zase deformuje servo; otvory pro hřídel serva jsou příliš velké, takže není statický a je také vystaven napětí.
Proto chce autor do budoucna zařízení mírně upgradovat následujícím způsobem: ujistěte se, že rotace kamery je ovládána pomocí šipek na joysticku, nikoli pomocí tlačítek; při zatáčení odlehčete zatížení serva.