

Tento projekt je ideální pro ty, kteří často zapomínají krmit své ryby. Nebo prostě ne vždy schopni to udělat včas. Po vyrobení takového krmítka si nemůžete dělat starosti se svými malými domácími mazlíčky a dokonce ani chvilku klidně odejít.
Materiály:
- Arduino UNO nebo jiný kompatibilní mikropočítač.
- Napájecí adaptér 9V nebo 12V.
- 5 V krokový motor ze staré disketové jednotky.
- Hladký oddíl (používá se z panelu nástrojů).
- Pákový přepínač z pevného telefonu.
- Pouzdro z pevného disku (slouží jako kontejner pro podávání).
- Hladká deska (např. Plastové pravítko).
- Stativ z CCTV kamery.
- Rezistor 10 kOhm.
- Mechanický časovač střídavého proudu.
První krok. Sestava pouzdra:
Konstrukce sestavy je znázorněna na prvním obrázku. Na jedné straně krytu pevného disku je vyříznut otvor. Pro tuto část podavače můžete dokonce použít plastovou láhev, budete však muset přijít s podpěrou, abyste ji udrželi vzhůru nohama.
Autor používá stativ z CCTV kamery, protože má ideální výšku pro instalaci krokového motoru pod ní. Zbývalo jen vyvrtat díru do pouzdra.
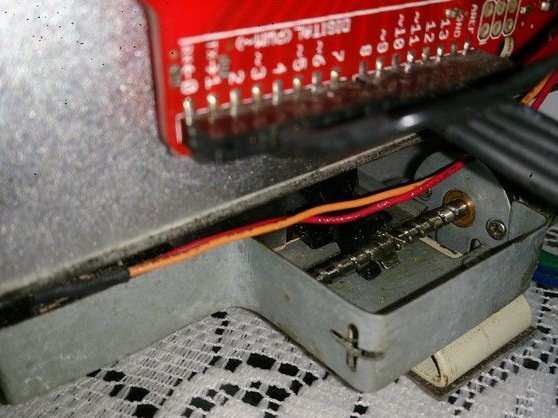
K posunutí krytu byl použit krokový motor 5 V s pohonným mechanismem použitým k pohybu pohonných čoček. Hladká přepážka z krabice byla umístěna na horní část držáku objektivu pod otvorem, kde by měly výtokové pelety vystupovat. K tomu je také doporučeno použít zlomené pravítko. Nechte jeden milimetr od spodní části trupu, aby krmné pelety mohly projít uzavřeným víkem.
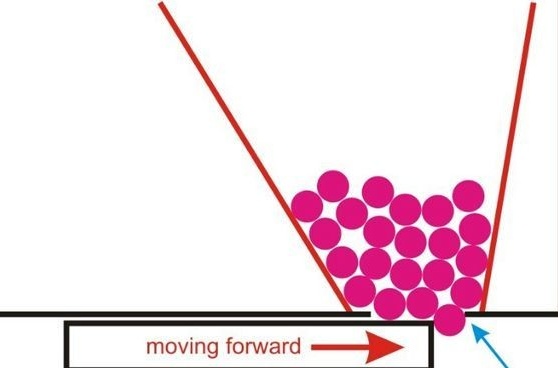


Krok dva Modifikace těla:
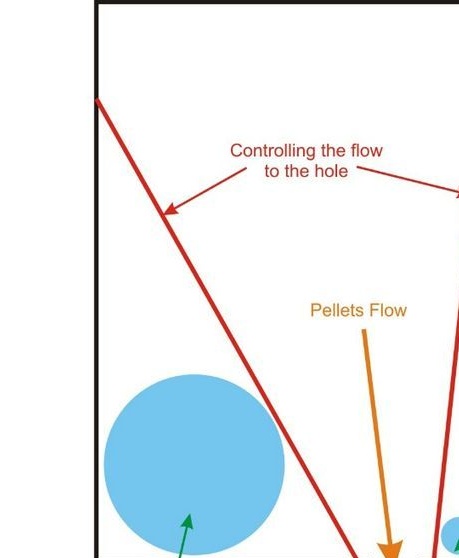
Následující obrázek ukazuje, jak by krmivo mělo procházet otvorem správně tak, aby pelety nezůstávaly pod výstupními úhly krmení.
Po dvou dnech používání si autor uvědomil, že některé krmivo uvízlo, ale nevyšlo podle plánu. Proto jsme potřebovali pravítko nebo jakýkoli hladký talíř, který se vejde do kontejneru a ve tvaru písmene V.

Krok tři Elektronický část podavače:
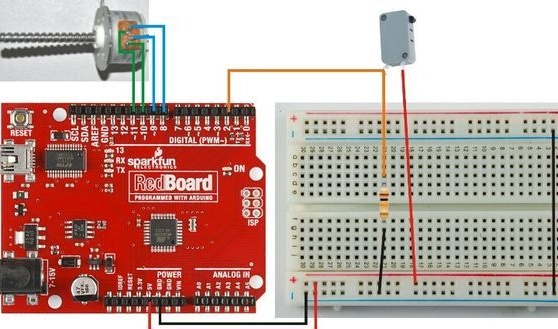
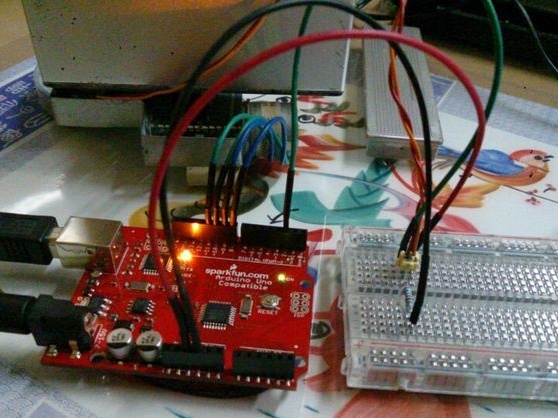
Krokový motor, odpor 10 kΩ a spínač jsou nainstalovány, jak je znázorněno na obrázku níže. Pro snazší pochopení fungování obvodu a testování se používá prkénko, v konečné sestavě chybí (příklad na poslední fotografii).
K digitálním pinům 8-11 se připojují čtyři motorové vodiče. Jedna noha přepínače na 5V výkon. Druhá noha je zase připojena k zemi pomocí odporu 10 kΩ a je také připojena k digitálnímu kolíku 2.
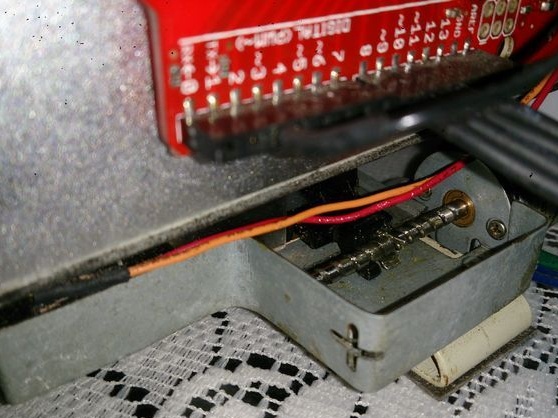
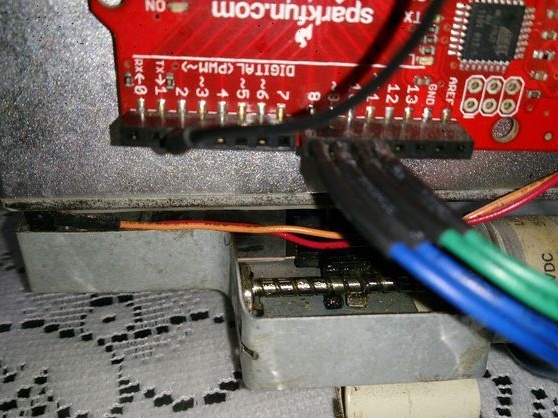
Přepínač je umístěn před pohyblivým krytem a kovová část je ohnutá, čímž tvoří zátku (červený a oranžový drát na třetí fotografii). Když se spínač posune dopředu a stiskne stop, Arduino zaregistruje HIGH hodnotu a zastaví motor.
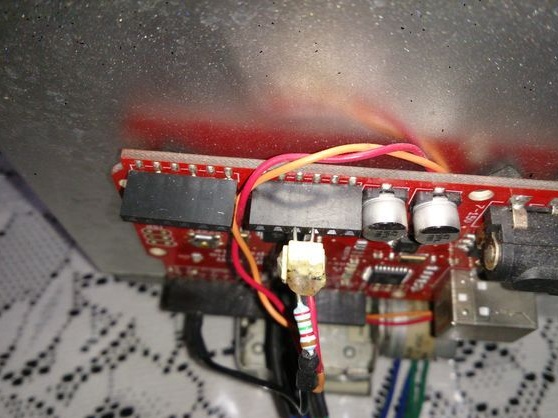
Deska je připevněna k zadní části pouzdra elektrickou páskou a zástrčka s časovačem na její straně. Používají se k vyvážení těla tak, aby zůstalo ve správné poloze.
Pracovní test domácí bez nádoby na potraviny:
Následující video ukazuje činnost kompletně sestaveného zařízení. Jak vidíte, první výstup zdroje je správný. Při druhém výstupu krmiva je vidět, že pokud jsou granule zaseknuty a víko se nezavře správně, bude se pohybovat dopředu a dozadu, dokud se nezavře správně.
Programový kód: