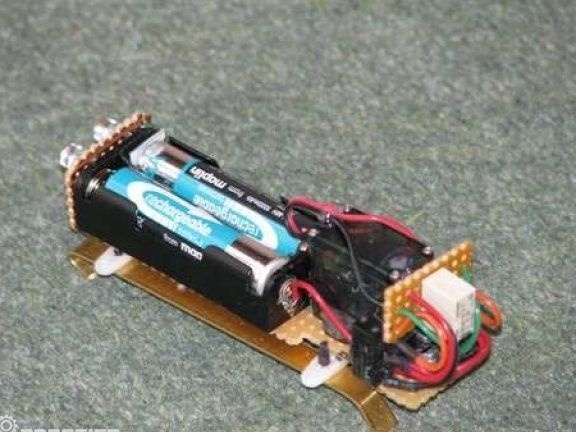
Carpet Crawler je malý robot patřící do třídy BEAM. Takové roboti okamžitě obsahují dva takové prvky, jako je estetika, biologie, elektronika a mechanika. Díky tomuto přístupu napodobují takoví roboti co nejvíce živé bytosti, někdy se zdá, že jsou schopni myslet.
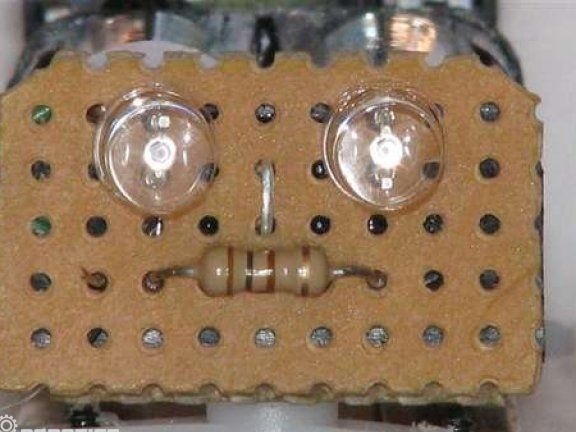
Jako mozek pro takové roboty se používají senzory a spínače a pohyby domácí kvůli servomotoru. Jako baterie se používají baterie AAA. Jako oči, které jasně září, jsou nainstalovány dvě LED diody.
Materiály a nástroje pro výrobu:
- mosazný pás o rozměrech 1/32 "x 1/4" x 8 ",
- dva kusy měděných pásů;
- ořechy a roboty M2;
- servomotor (Micro RC (7,5 g));
- dva mikrospínače (lze získat ze starých pohonů);
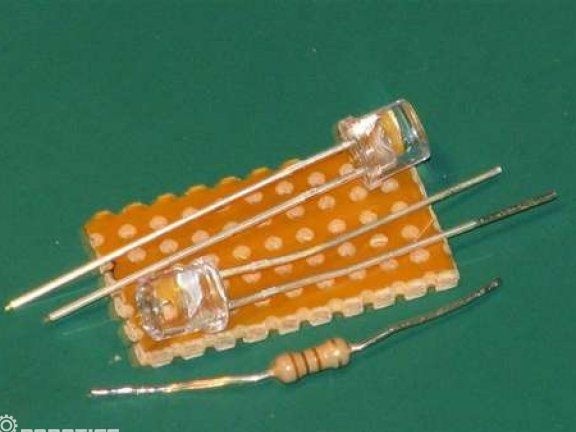
- dvě diody LED (nejlepší je použít červenou, protože v tomto případě může fungovat bílá nebo modrá);
- jeden odpor 100R (pokud LED diody jsou žluté nebo zelené, pak 47R);
- dvě baterie AAA a jejich držák;
- tenké zapojení.




Výrobní proces:
První krok. Změna servomotoru
Servomotor je konstruován tak, že během provozu vytváří impulzivní pohyby. V tomto případě je třeba provést novou úpravu tak, aby fungovala na rotaci. Existují dva způsoby, jak toho dosáhnout.
V prvním případě můžete ušetřit rychlost a směr jak z řízení motoru, tak z řídicí elektroniky. Zařízení bude pro provoz stále potřebovat příchozí impulsy.
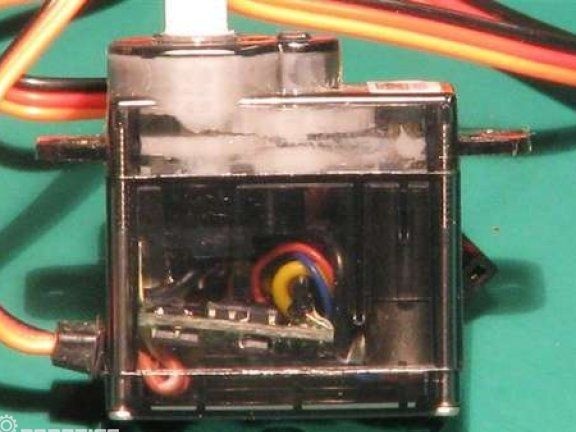
Autor šel opačně. Je nutné přerušit dorazový prvek ozubených kol. Pak je třeba řadit ozubená kola, bude obtížné je sestavit zpět, pokud dojde ke ztrátě sekvence. Při demontáži musí být povrch servomotoru namazán silikonovým tukem.
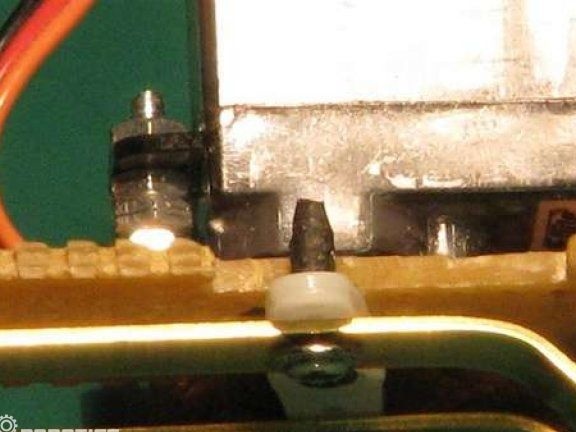
Obrázek ukazuje řídicí mechanismus RSV, který je třeba přesunout.

Po vyjmutí desky musí být červený vodič přepnut na přesně ten červený vodič motoru. Vodiče by měly být pečlivě obaleny elektrickou páskou, aby nedošlo ke zkratu.

Krok dva Vytvořte mechanickou část
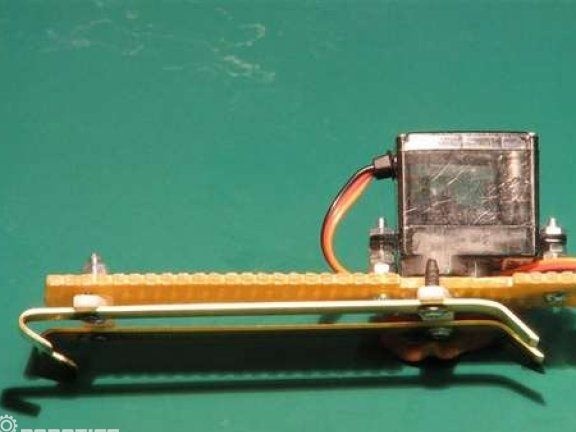
Na pracovní desce musíte vyvrtat několik otvorů a poté nainstalovat relé na zadní stranu baterie.K montáži servopohonu se používají 2 mm šrouby.
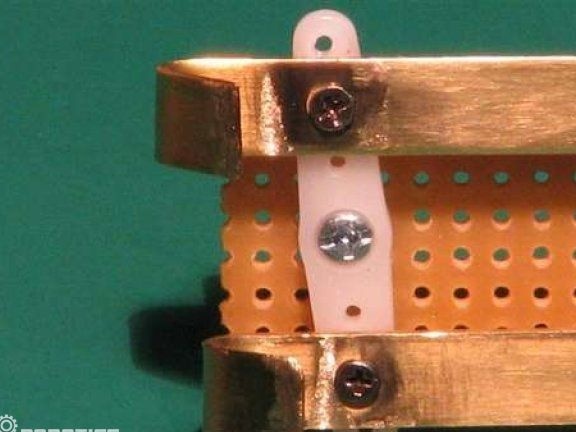
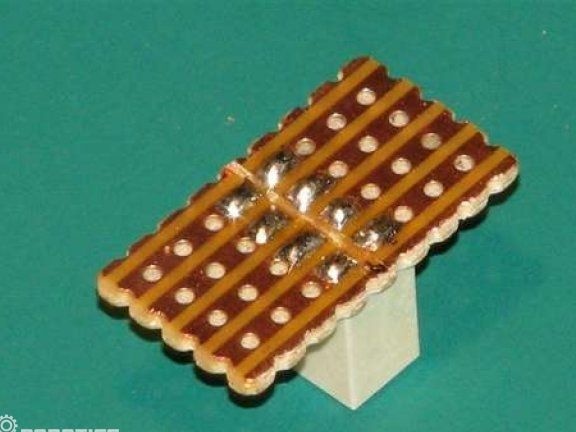
Nohy robota jsou vyrobeny z masivních měděných desek, proto se nejprve rozřežou na kousky dané délky a vytvoří ohyby. Díky takovýmto průhybům se robot přilne k silnici a plazí se. Desku upevněte malými šrouby.


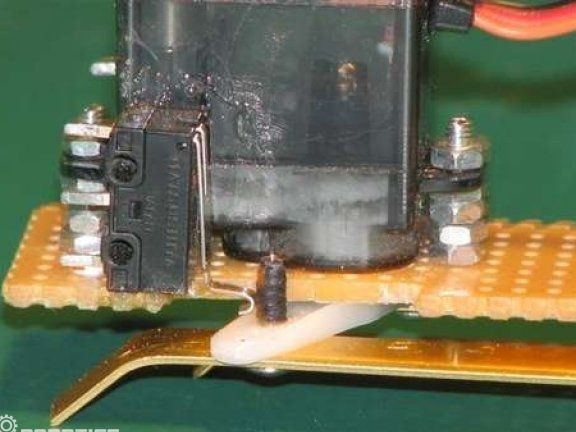
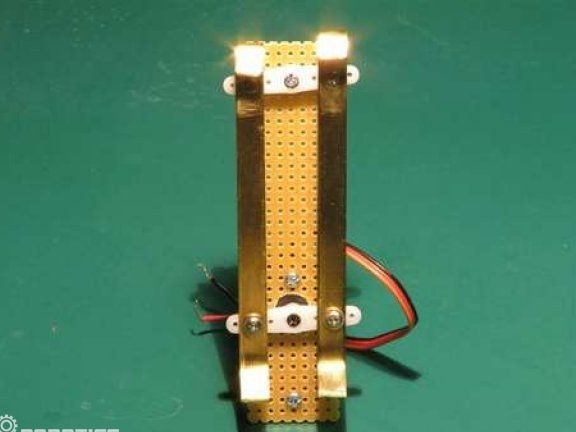
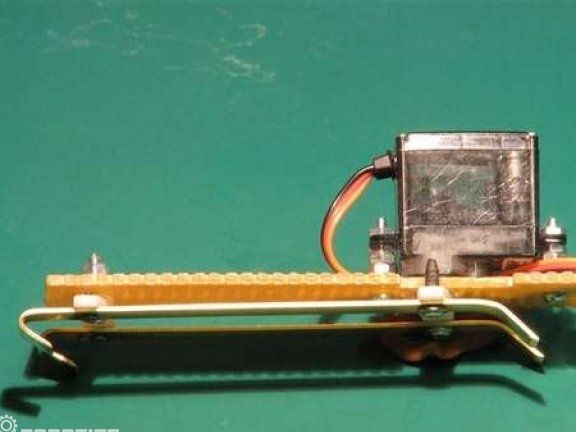
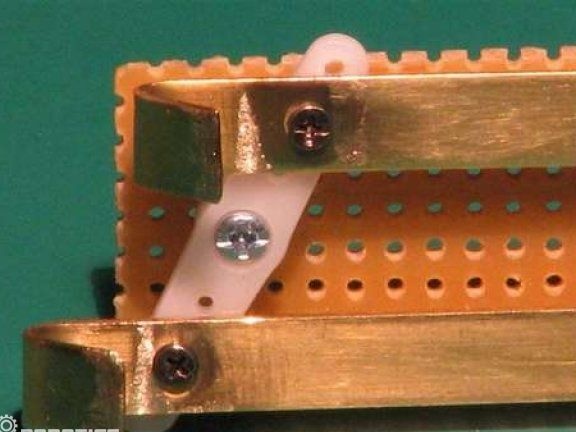
Pro ovládání nohou musíte nastavit spínače. Jsou připojeny k servomotoru lepidlem.
Krok tři Robot elektronický obvod
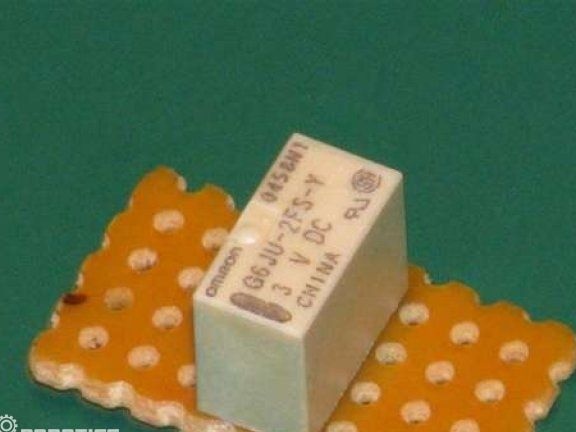
Za hlavní součást práce v domácnosti lze považovat reléovou západku, která bude fungovat po odpojení od cívky. Relé změní pohyb, ale zůstane na jednom místě až do dalšího kola.
Impulzy do cívek pocházejí ze dvou mikrospínačů, které se zapnou, když relé antény zasáhne spínač.

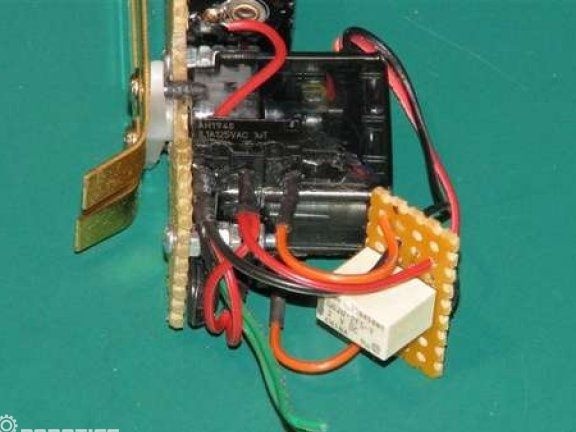
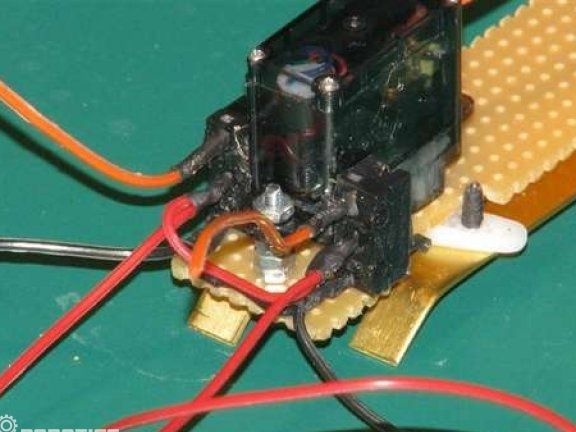
Krok čtyři Montáž elektronické části
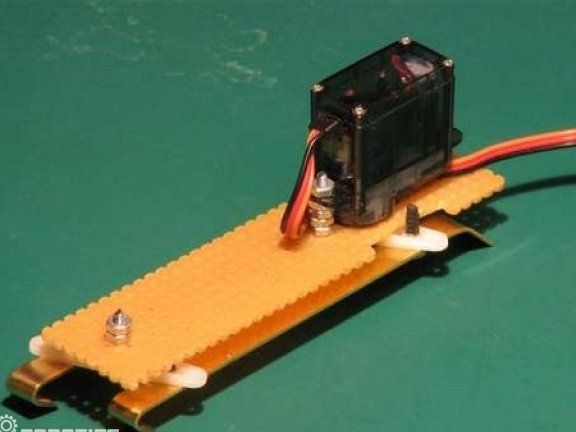
Relé je namontováno na šrotu na desce, takže je nejjednodušší připojení. Celý proces připojení elektroniky je zobrazen na fotografii.





To je vše, nyní je robot připraven. Nejlepší ze všeho bude vypadat sám na povrchu koberců, protože je navržen speciálně pro taková místa. Nejprve by robot měl rozsvítit LED diody a poté pomalu plazit po podlaze.