

Chcete bojovat mezi pavoukovými roboty? Pak si pečlivě prostudujte tento článek, v něm vám Mistr řekne, jak vyrobit takového pavouka. A pro přehlednost jeho práce se podívejme na video.
Nářadí a materiály:
Pro pavouka
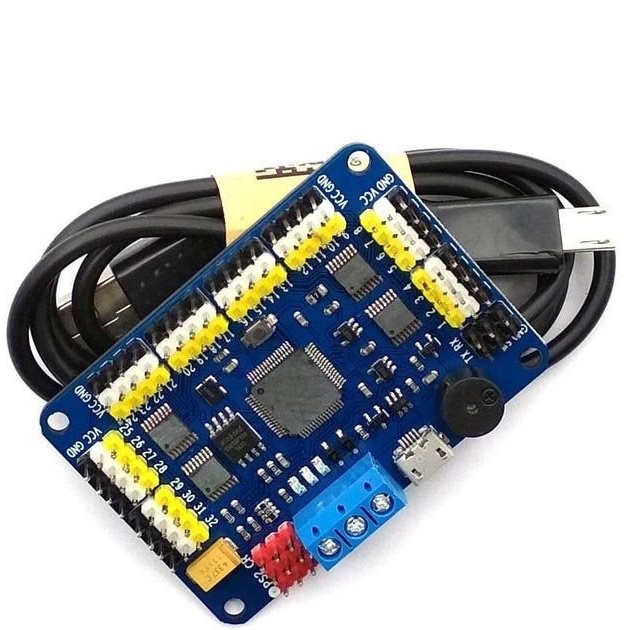
32-kanálový servo řadič;
-Wemos D1 Mini ovladač;
- Servopohony MG90S - 18 ks;
-Ubec 6A 5V ovladač;
- DC-DC buck převodník;
- Svetry;
-Baterie;
Pro věž
- Dva motory;
-Výkonný modul;
- Snižovací převodník;
Servo;
-3D tiskárna;
- Lepicí pistole;
-Lepidlo;
- šroubovák;
-Fastery;
- Oboustranná páska;
-Nippers;
-Život;
-Nadfiles;
-Plastické koule;
-Solding příslušenství;






Krok 1: Tisk součástí
Nejprve musíte vytisknout podrobnosti těla a nohou na 3D tiskárně. Zde si můžete stáhnout soubory pro tisk odkaz.


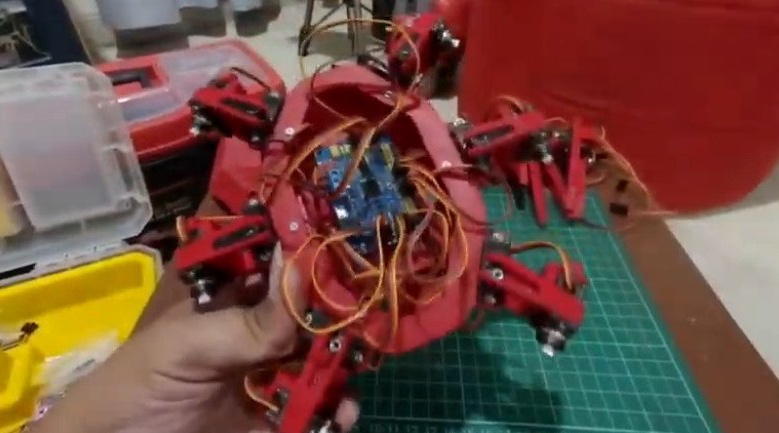
Krok 2: Sestavte
Nyní musíte sbírat robopauk.
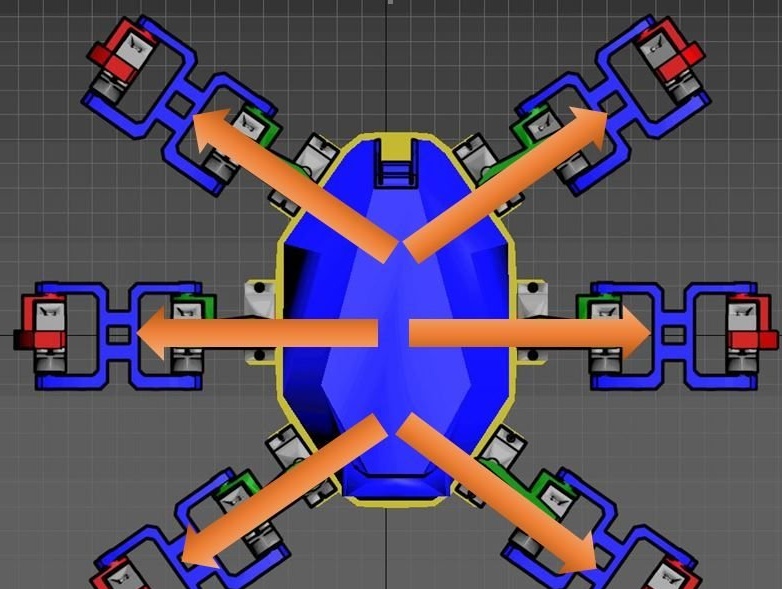
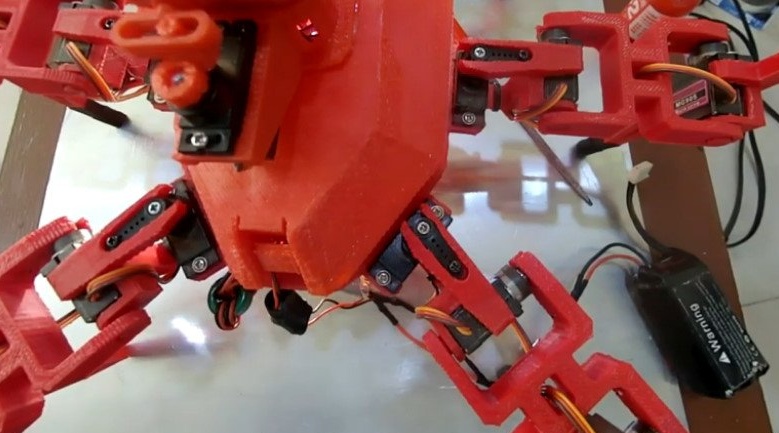
Mistr instaluje serva na klouby pavoučí nohy. Celkově má robot na každé noze šest noh a tři serva.








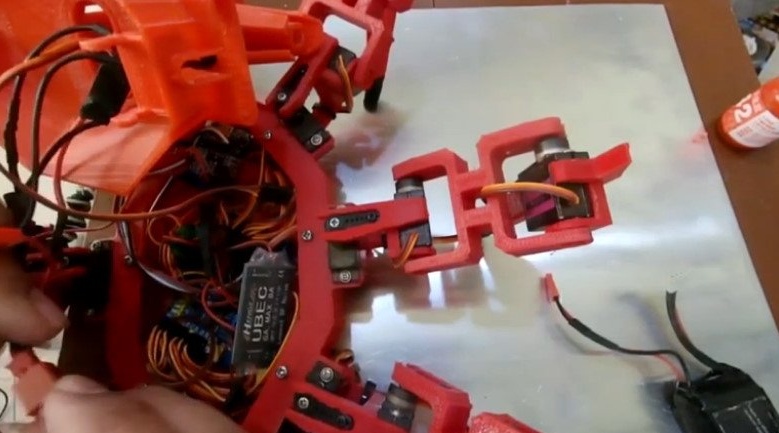
Nainstaluje serva na platformu podvozku.




Upevňuje první klouby nohou k servům platformy.




Vodiče jsou vtaženy do technologických otvorů a připojeny k ovladači.





Nainstaluje pahýly.


Stanoví druhé klouby nohou. Připojuje vodiče ze serv k ovladači.






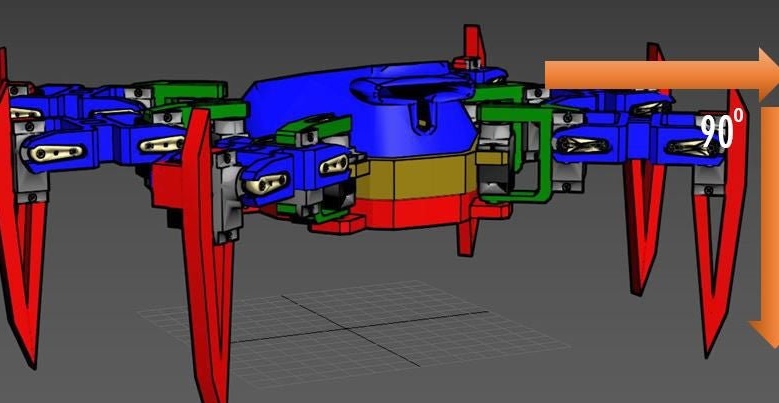
Nainstaluje třetí kloub. S tímto kloubem se pavouk při pohybu dotkne povrchu.


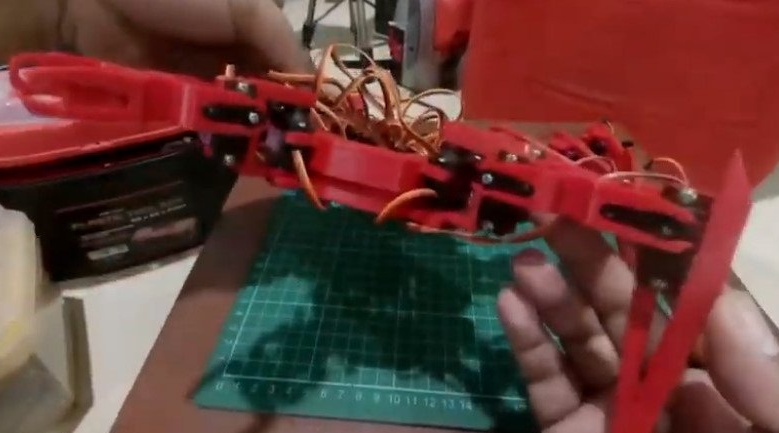

Připojuje a kontroluje činnost každého servopohonu.



Pokud vše normálně fixuje vodiče pomocí kravat, nainstaluje baterii a zavře kryt.



Proces sestavení je vidět ve videu.
Krok tři: Asi elektronika
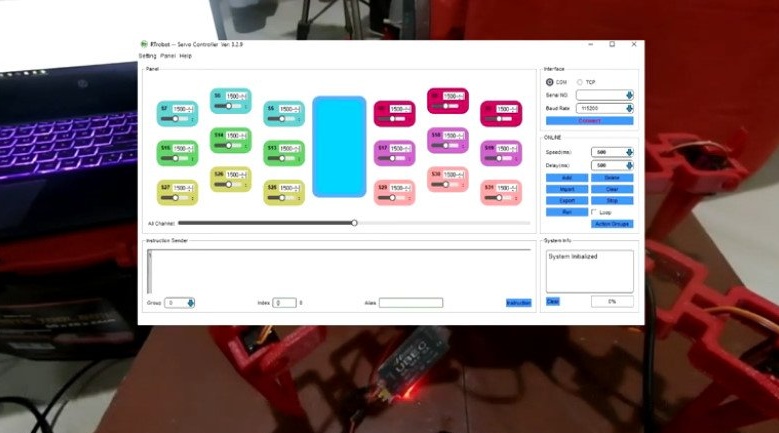
Průvodce použil k řízení pohybů ovladač serva RTrobot. Program pro správu lze stáhnout zde nebo zde.
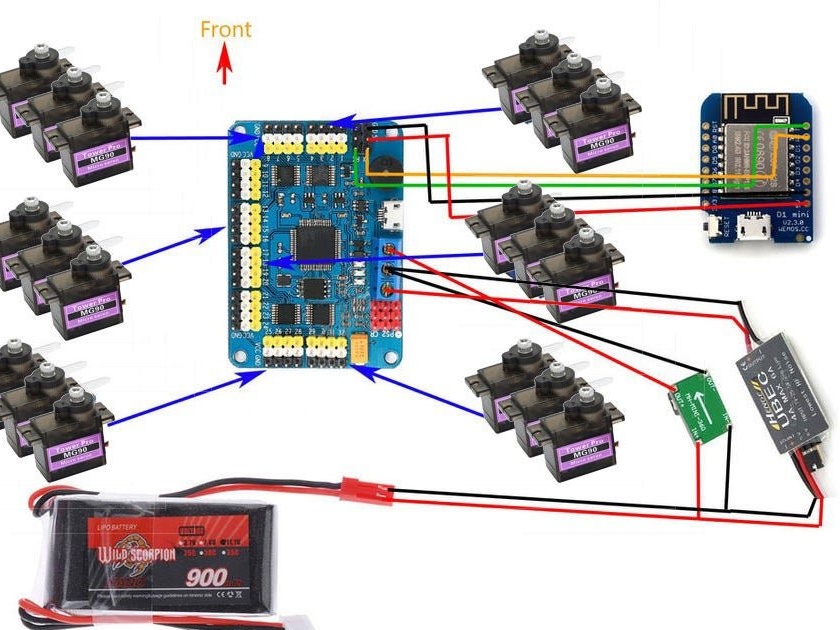
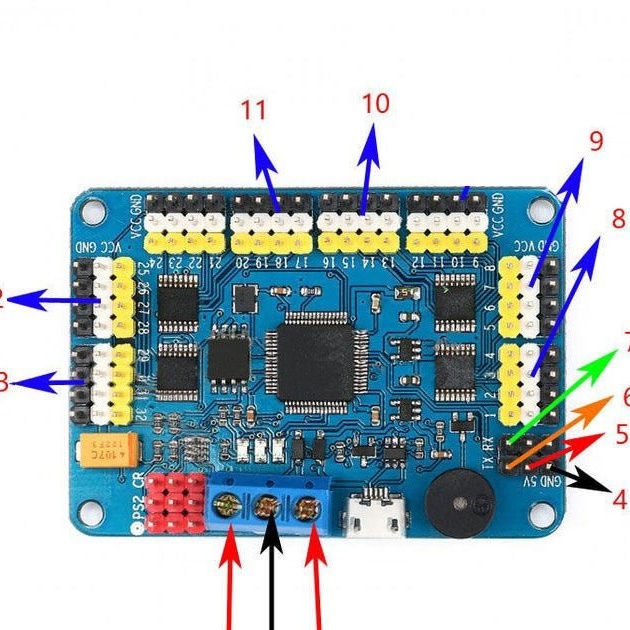
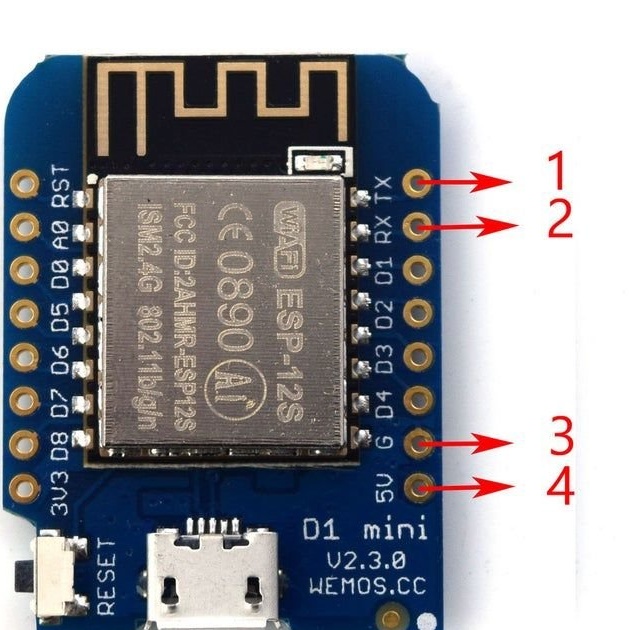
Vše je spojeno takto:
1. Výstup 5 V (+) UBEC
2. Země z UBEC a převodníku dolary
3. Napájení 5 V (+) z převodníku
4. Na pin Wemos D1 mini G
5. na Wemos 5v
6. na Wemos D1 RX
7. Wemos TX
Servopohony jsou připojeny na piny 8 až 13.
Nainstalujte kód na NodeMCU. Můžete si ji stáhnout zde.
WeMos D1 mini je minimální karta Wi-Fi ESP8266.
Pomocí wemos D1 mini jako přístupového bodu WIFI můžete odeslat sériový příkaz do řadiče serva. Vše, co potřebujete, je jednoduše zabalit desku nodeMCU kódem a můžete připojit smartphone k AP nodeMCU. Poté pomocí webového prohlížeče přejděte na adresu http://192.168.4.1.
Je to důležité.
po zapnutí serva se všechna serva přesunou do původní / standardní polohy
instalujte serva co nejpřesněji, jak je znázorněno na obrázku výše nebo ve videu
upravte polohu kloubů, vypněte a znovu zapněte zařízení, abyste se ujistili, že jsou všechny nohy ve správné poloze
pokud klouby ulpí, třete, upravte polohu.
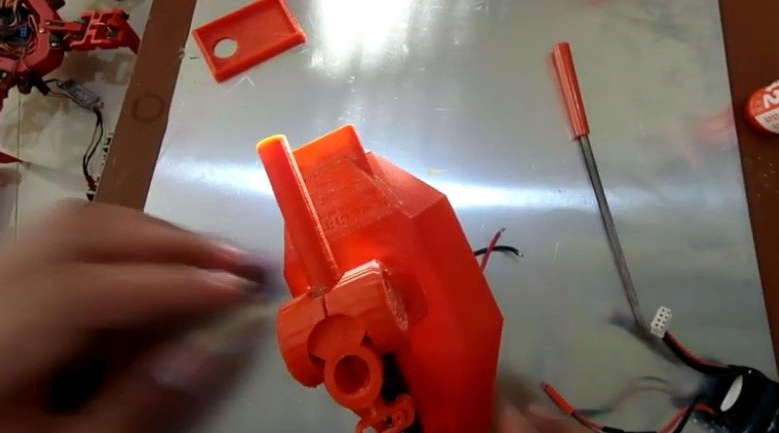
Krok 4: Věž
Nyní se obracíme k montáži věže.
Nejprve je třeba vytisknout podrobnosti o věži. Zde si můžete stáhnout soubory odkaz.
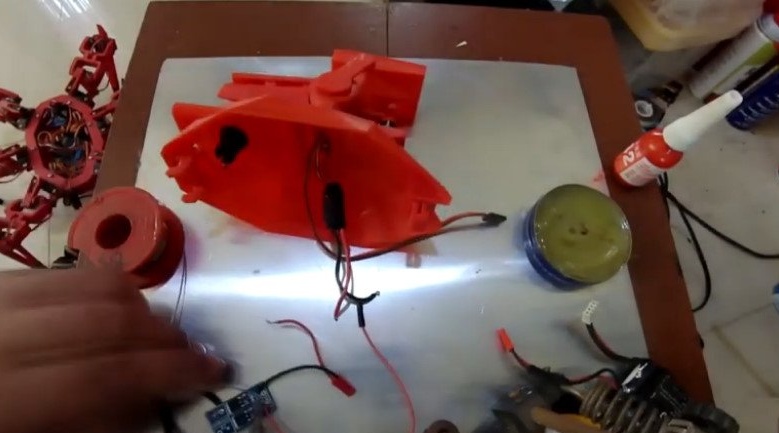
Poté pán pokračuje v sestavování věže. Obvod pro otáčení věže a připojení elektrických částí je níže.
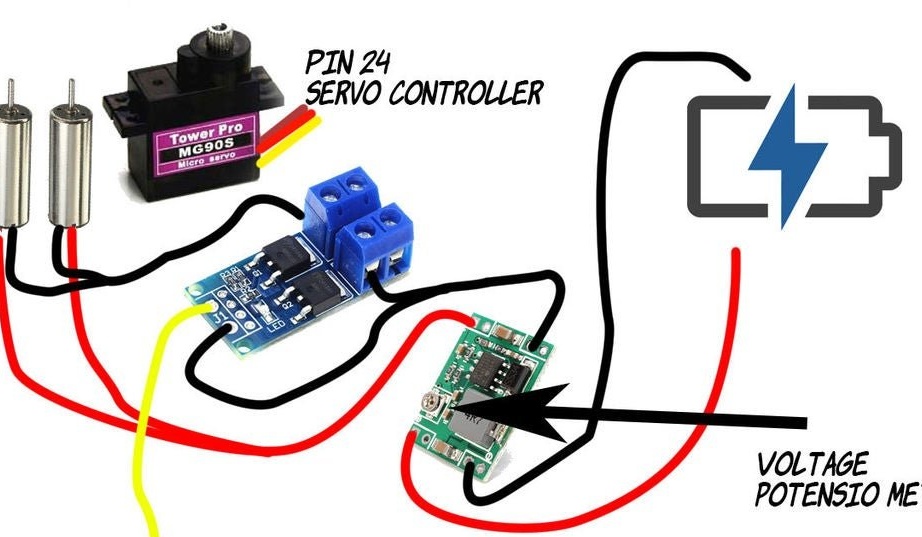
Nainstaluje na věž servo.







Oboustranné pásky se lepí na válečky.


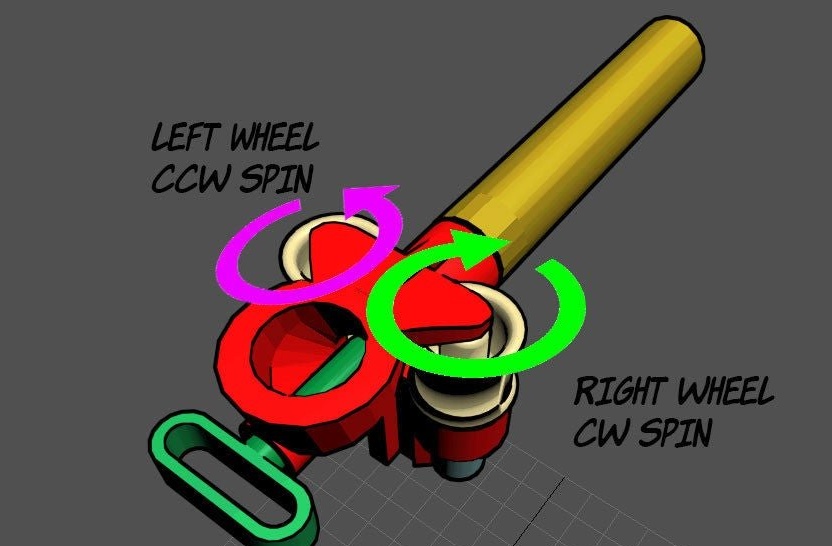
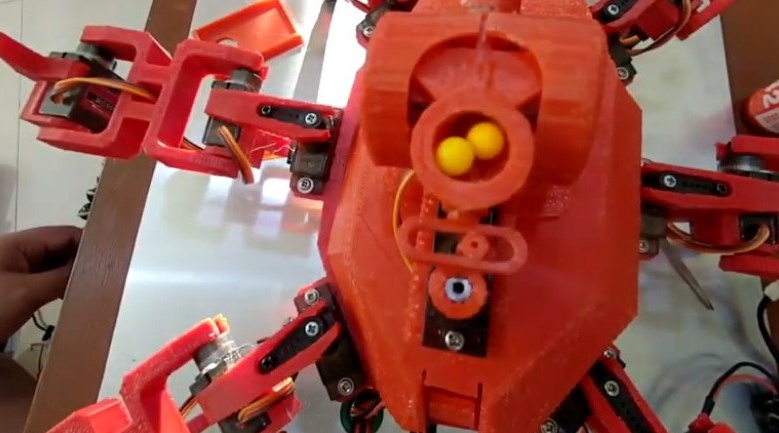
Sbírá zbraň. Instaluje motory do držáku. Instaluje kladky na hřídele motoru.







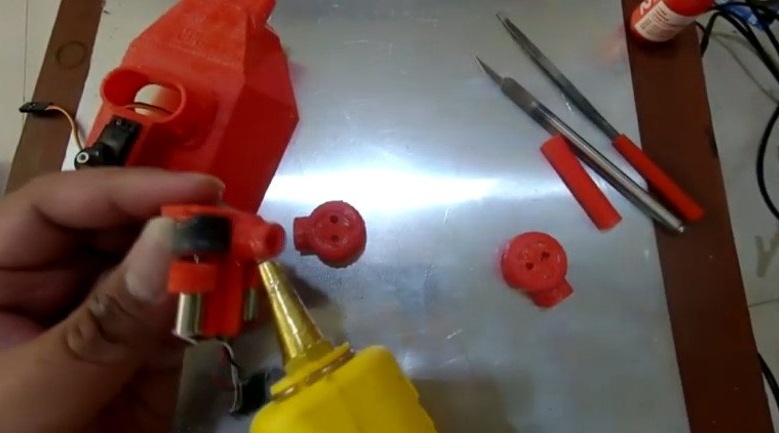
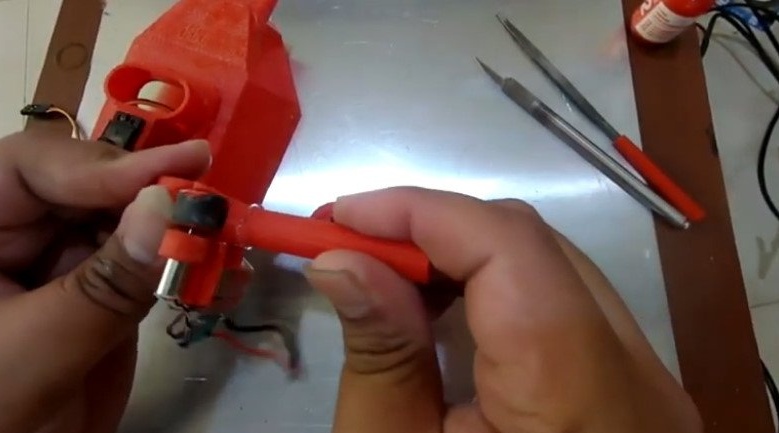

Spojuje dráty a sbírá věž.




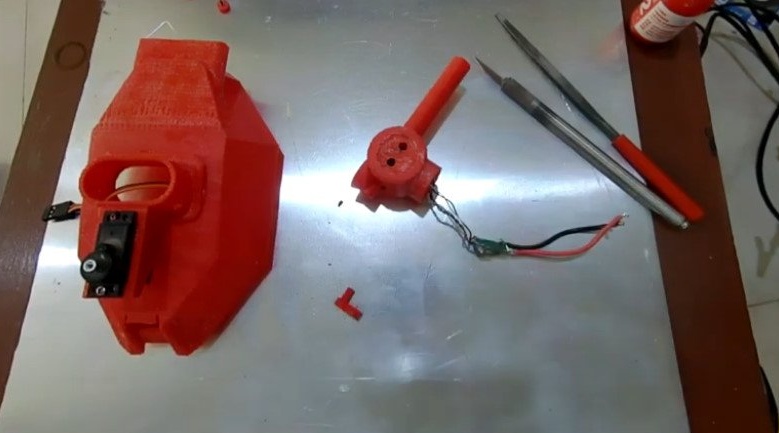
Naloží náboje a zkontroluje činnost zbraně. Mechanismus lze nastavit pohybem držáku na hřídeli serva.


Provede konečné připojení, montáž a kontrolu.




Video se sestavou věže je vidět níže.
Všechno je připraveno. Shromážděte ještě jeden takový robopauk a můžete uspořádat boje.
