
Dobrý den všem, milí přátelé! V dnešním článku bych vám chtěl ukázat docela zajímavý nápad domácí, což může udělat téměř kdokoli, kdo udělal alespoň trochu vyšívání a kdo ví něco o Arduino.
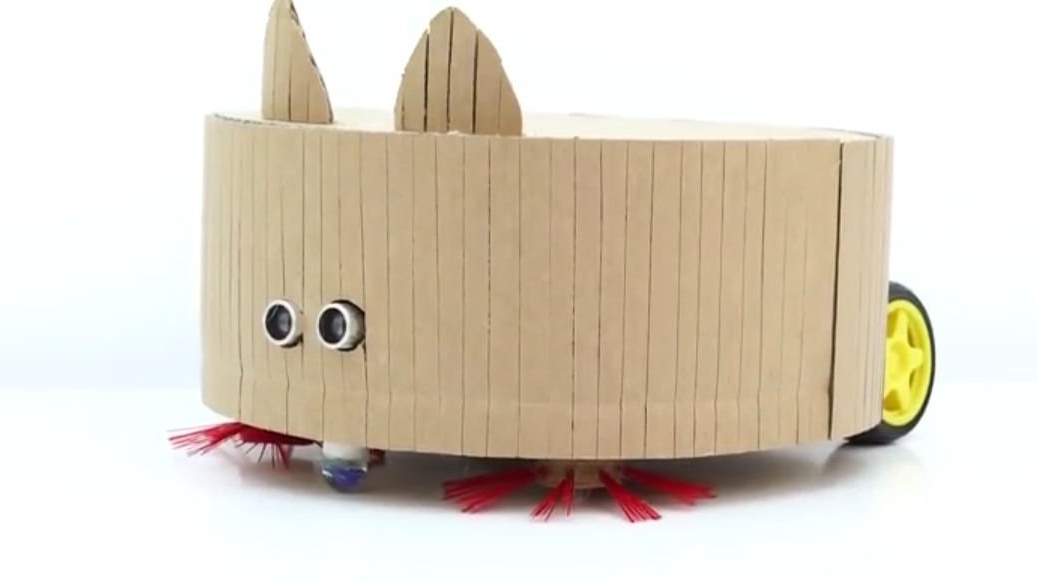
Obecně platí, že dnes budeme dělat jednoduché roboti kartonový vysavač udělej to sám. Ale řeknete mi to, protože jsem vám již řekl, jak si sami vyrobíte robota, a budete mít pravdu, ale tento vysavač je mnohem jednodušší, levnější a pohodlnější než ten předchozí. Ano, a to model upraveno a vypadá lépe a má také plnou automatizaci na palubě. Tohle řemeslo, pomůže nejen s časem, ale také se stane nepostradatelným pomocníkem ve vašem domě nebo dílně. Stručně řečeno, věc je užitečná a není složitá.
No, dost dlouhé předmluvy, pojďme!
A tak pro tento domácí produkt potřebujeme:
vlnitá lepenka (hodně lepenky)
-
spojovací dráty
-
-
-Kola pro převodové motory
- ovladač ovladačů pro Arduino (autor domácího produktu používá ovladač modelu, který k připojení stačí vložit do arduina, ale můžete použít ovladač, který je pro vás vhodný, hlavní věc je, že napětí odpovídá převodovým motorům)
-
-plastové uzávěry lahví
- štětiny z koště
-motor s ventilátorem turbíny, v zásadě to můžete udělat sami
plastové pletivo
- malý kontejner
krabička na dvě 18650 baterií
-
Z nástrojů budeme také potřebovat:
páječka
lepicí pistole
kancelářský nůž
linka
- tužky nebo značky
Prvním krokem je vzít velký list kartonu, pravítko a kompas. Měříme 13 cm kompasem a nakreslíme na karton kruh, po kterém jsme jej vyřízli, celkem potřebujeme dva takové kruhy:


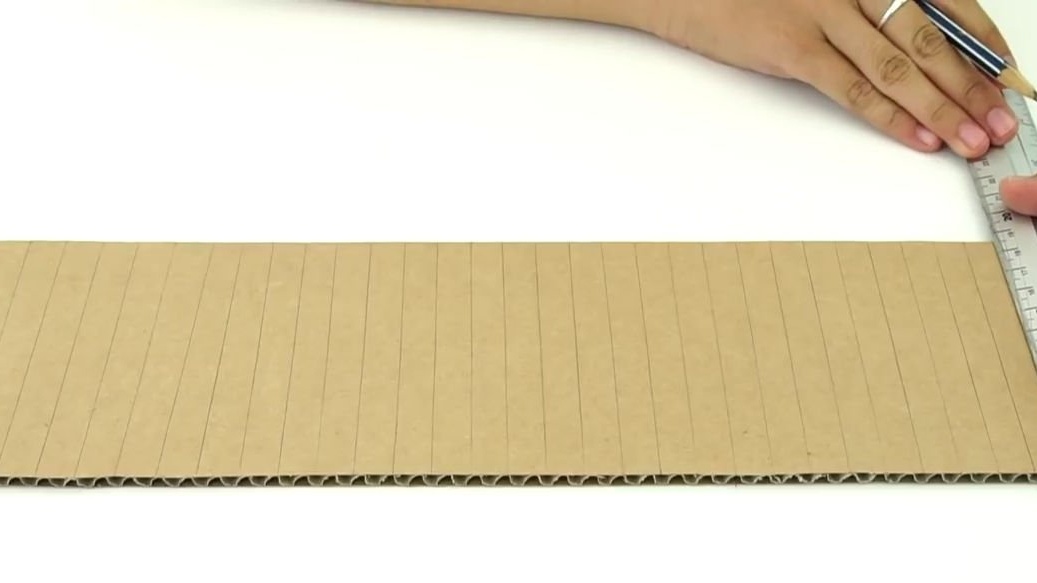
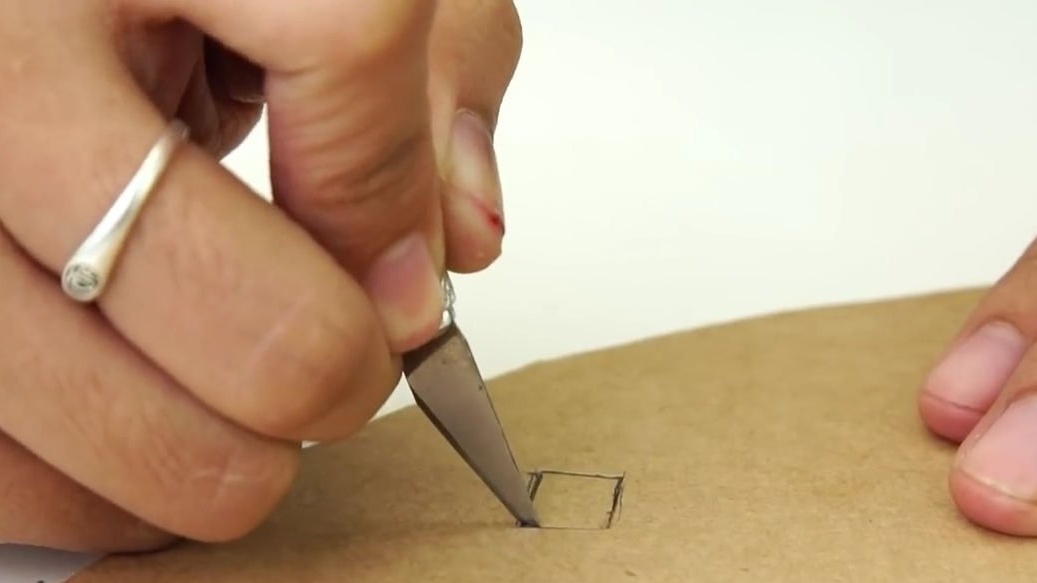
Pak jsme vystřihli obdélník malé velikosti ze stejné lepenky. Vezmeme pravítko a tužku, tužkou natáhneme lepenku v intervalu asi 1 cm. Po této proceduře vezmeme administrativní nůž a provedeme malé řezy horní vrstvy lepenky, aniž bychom se dotkli dna. To je nezbytné, aby se lepenka stala pružnější:



Zkroucíme prvotní obrobek vytvořený kolem jednoho z lepenkových kruhů a samozřejmě ho lepíme horkým lepidlem:

Pojďme se zabývat elektronikou a mechanickou částí.
Nejprve vezměte převodový motor a nasaďte na něj kolo, to samé jako s druhým motorem:

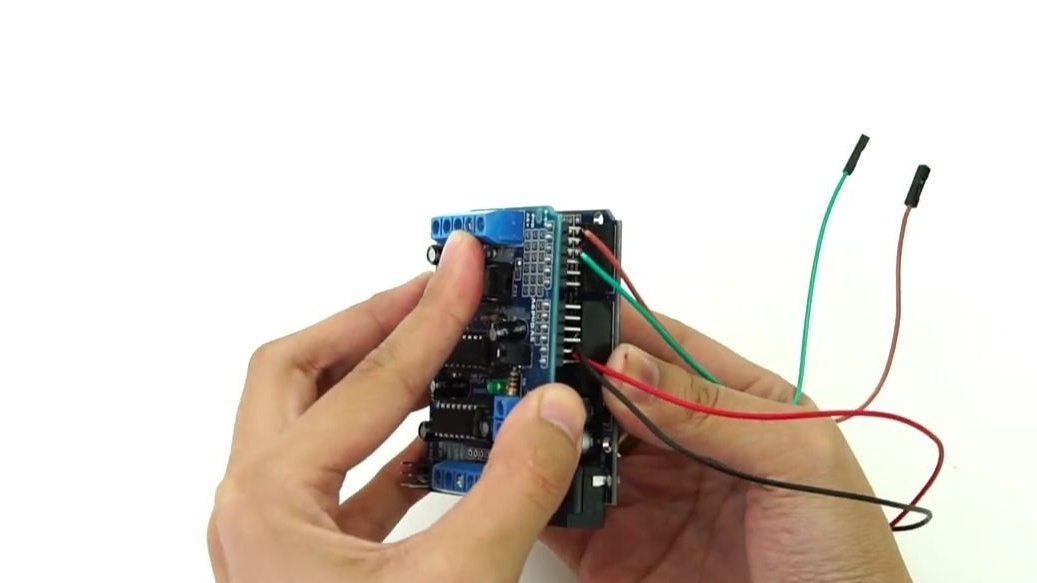
Potom vezmeme desku Arduino Uno a spojovací vodiče, které musí být zase připojeny k určitým pinům (kontaktům) na desce. Pro větší pohodlí bereme různé barvy: připojujeme červenou na 5 V, černou na GND a další dva až dva různé kolíky. K jakým kolíkům připojíte vodiče, musíte okamžitě zjistit na základě kódu, nebo napsat kolíky, ke kterým jsou připojeny vaše vodiče. Obecně zde není nic komplikovaného, připojujeme:

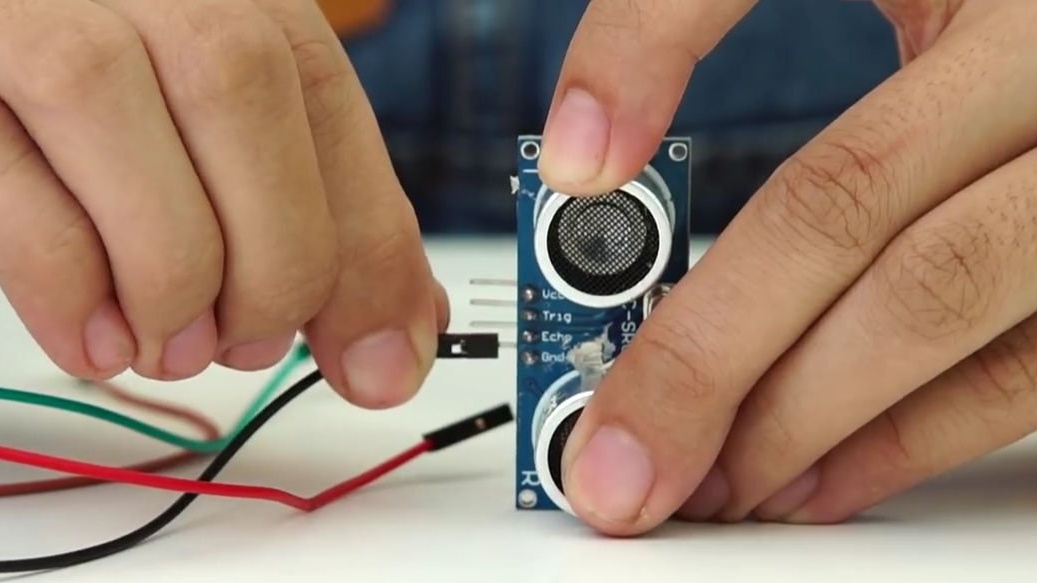
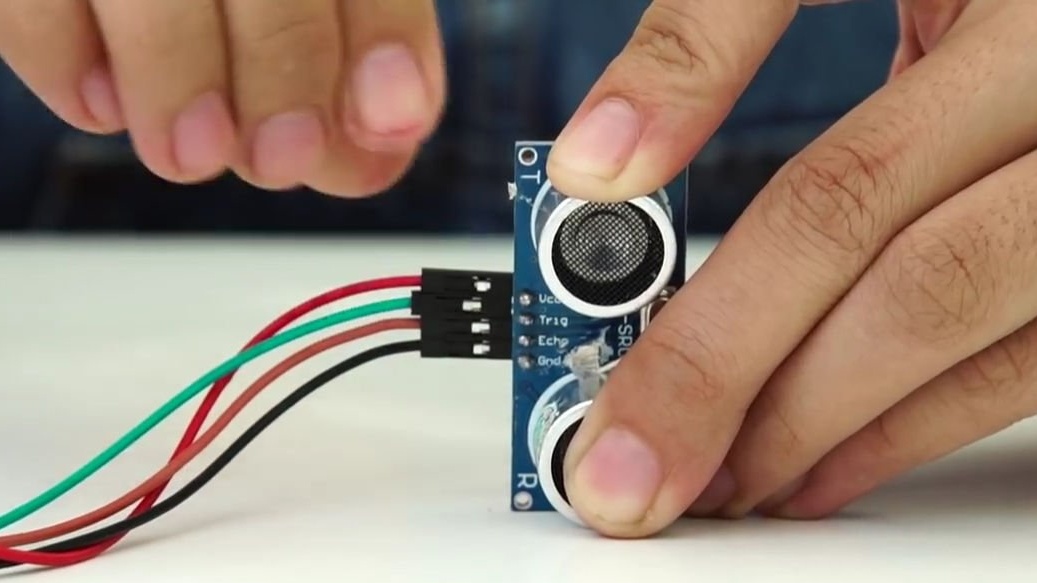
Připojíme opačnou stranu vodičů k ultrazvukovému dálkoměru, jak je znázorněno na níže uvedené fotografii, pokud to není jasné, můžete sledovat video autora.
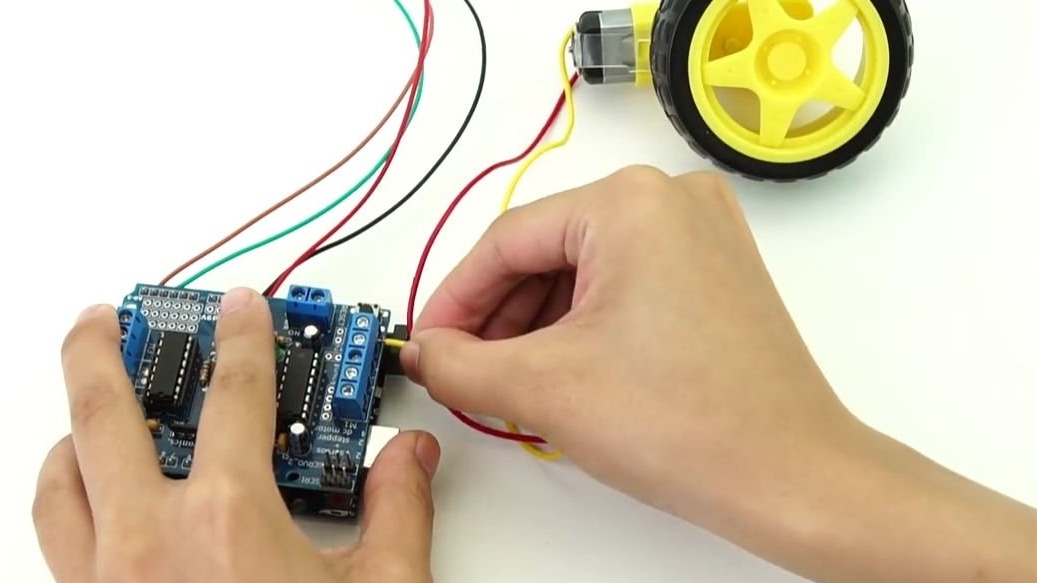
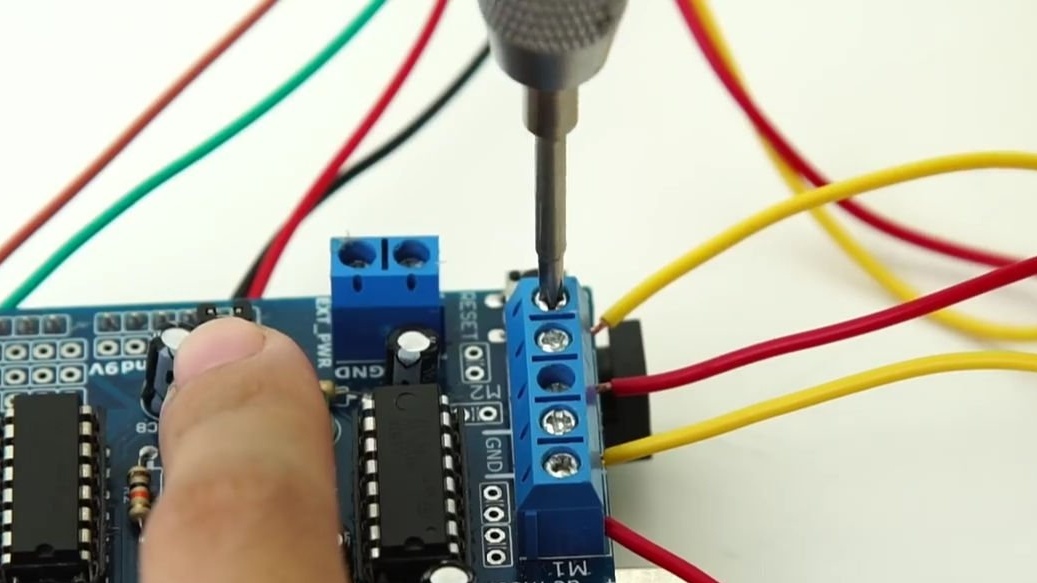
Připojíme převodové motory k řidiči motoru, nepotřebujete nic ani pájet, stačí jej vložit do svorek a to je vše:

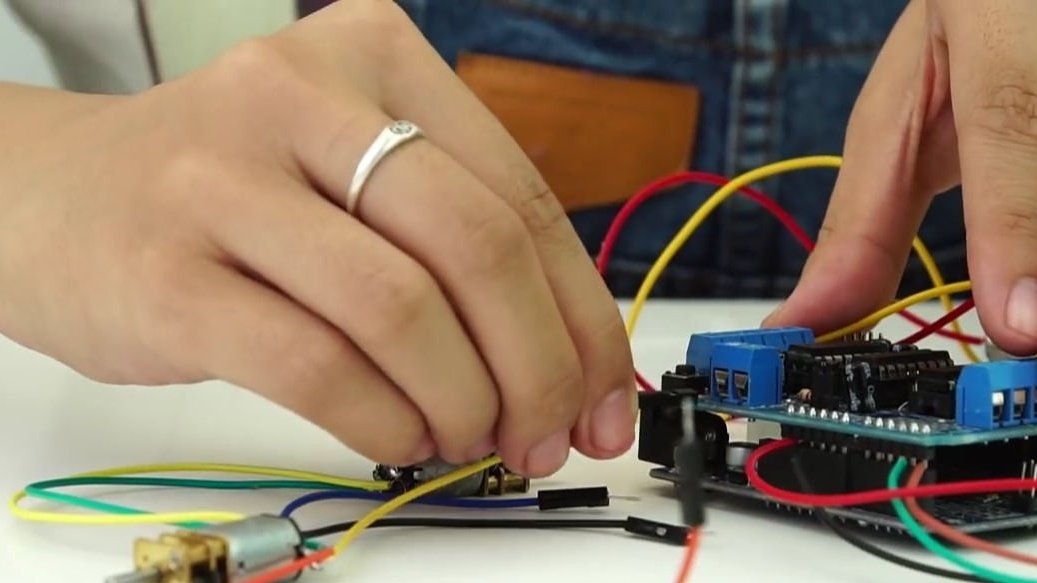
Připojovací vodiče je nutné pájet na mini motory, pomocí kterých spojíme stejné motory s řidičem motoru. Obecně připojujeme:
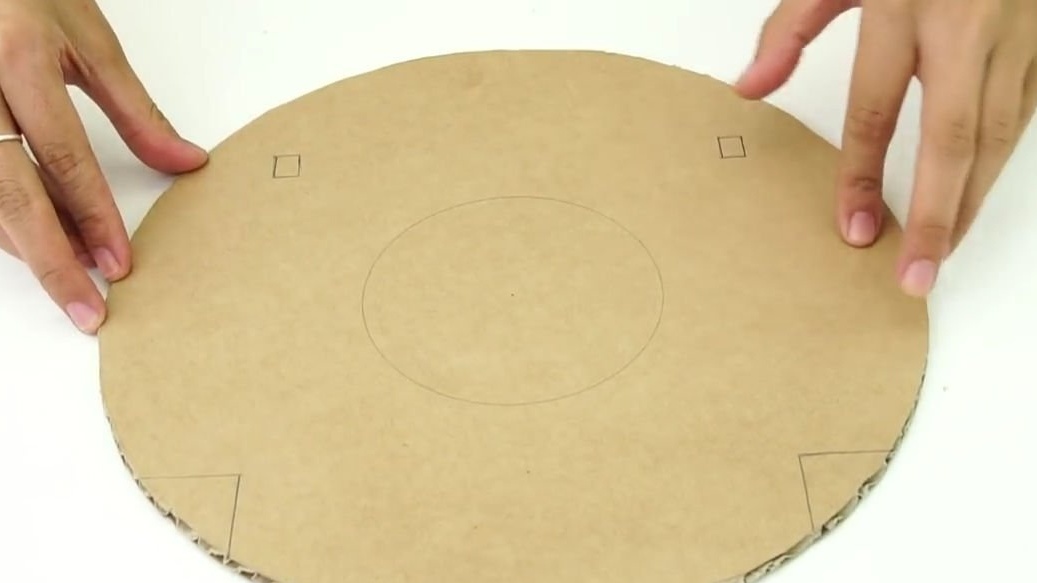
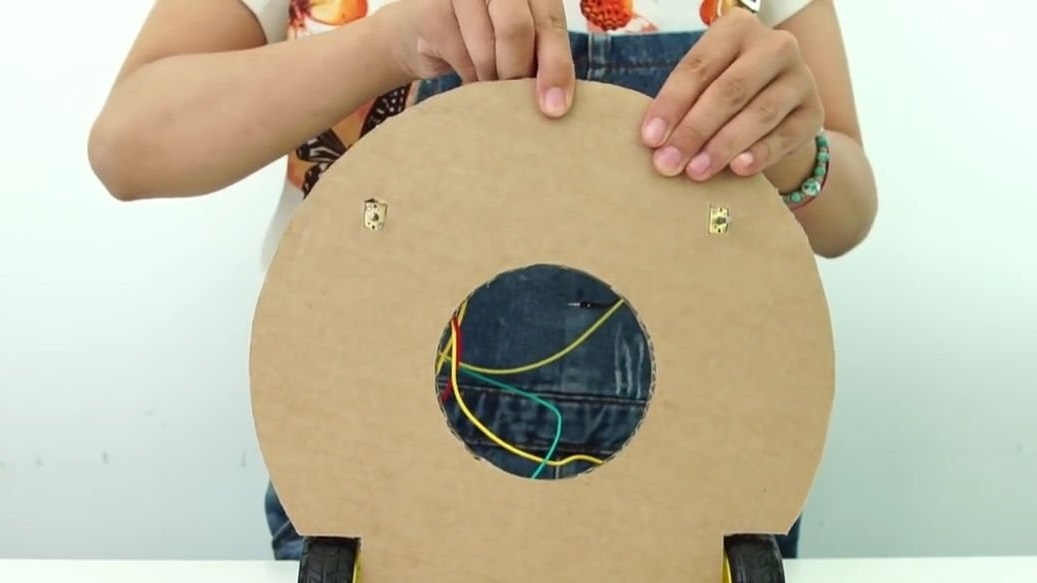
Nyní vezmeme zbývající lepenkový kruh, který byl vytvořen na samém začátku. Na to musíte nakreslit další kruh ve středu a několik obdélníků. Všechny značky můžete vidět na fotografii níže. Potom jsme vystřihli označené otvory, měly by dopadnout stejným způsobem jako na obrázku níže:

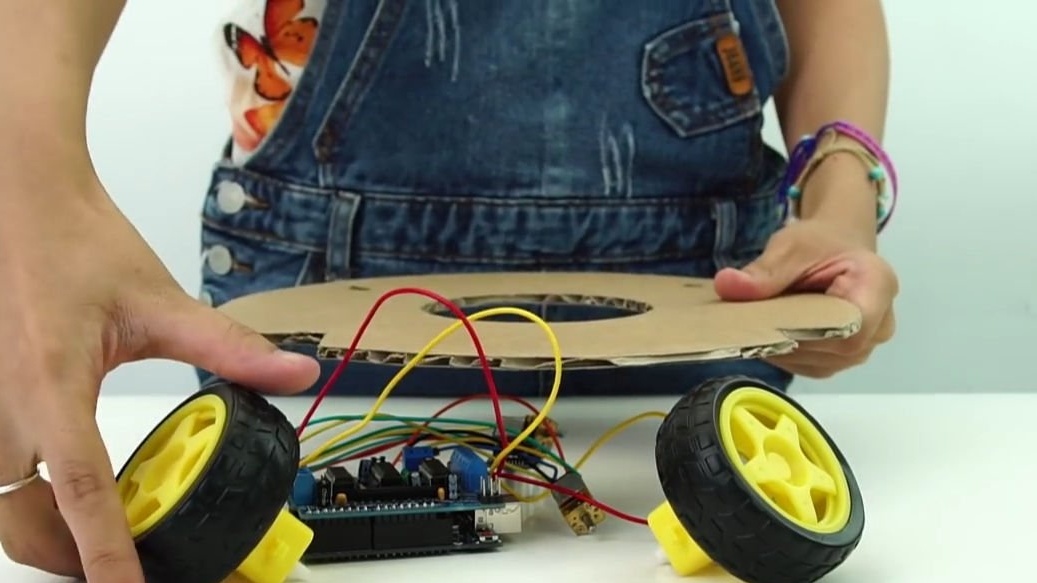
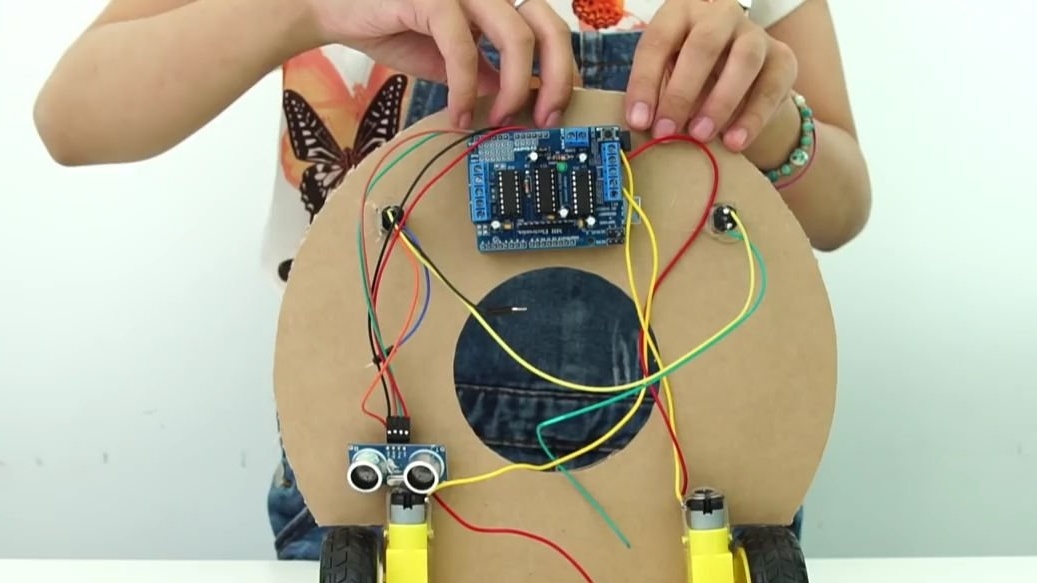
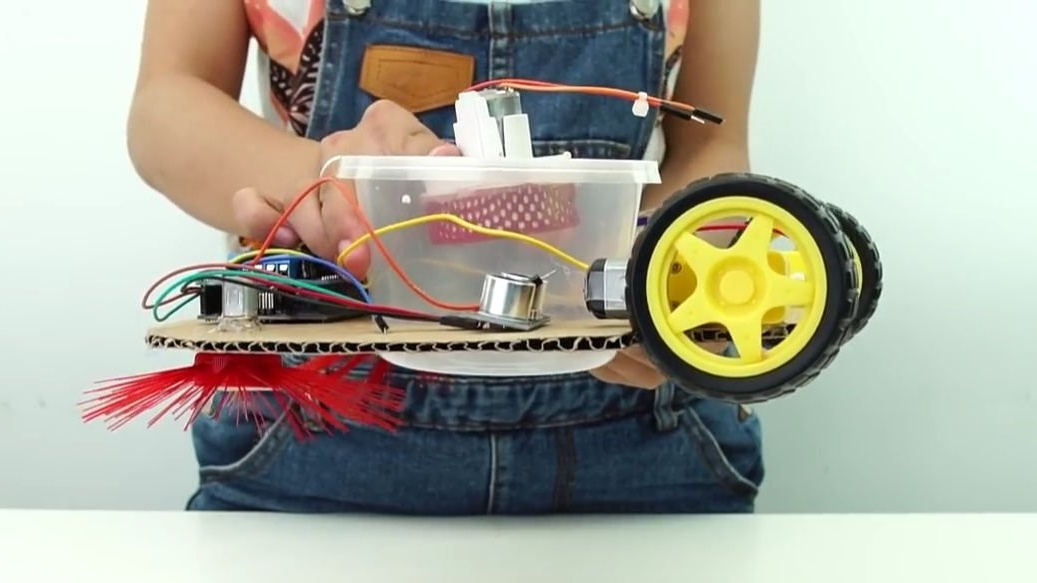
Vezměte celý elektronika a umístit jej na dříve vyrobený kartonový kruh. Vložte malé motory do štěrbinových pravoúhlých otvorů a zbytek elektroniky připevňujeme k tavnému lepidlu, připojte velké převodové motory paralelně k zadní části a nedotýkejte se ultrazvukového dálkoměru:

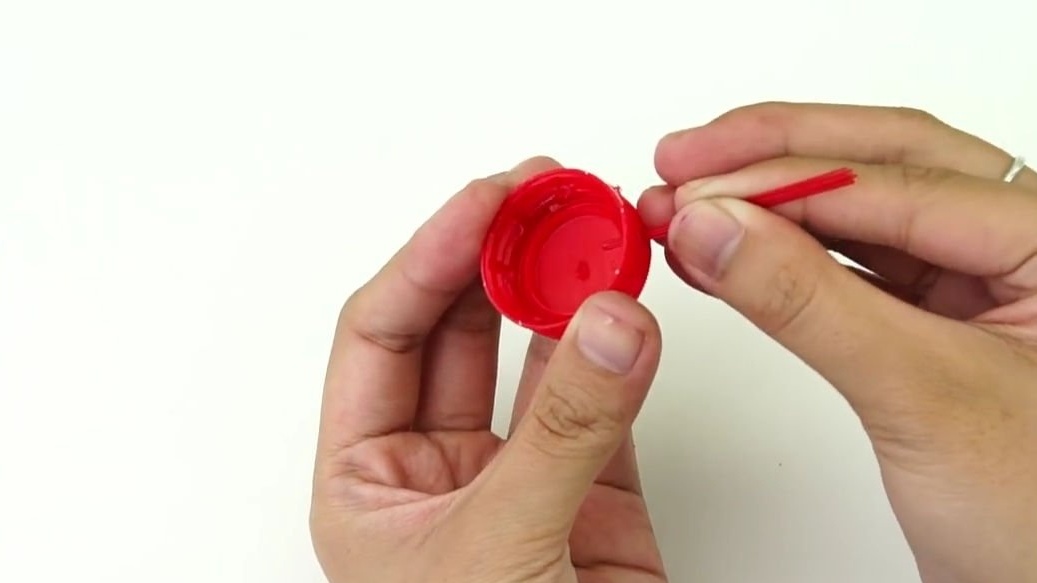
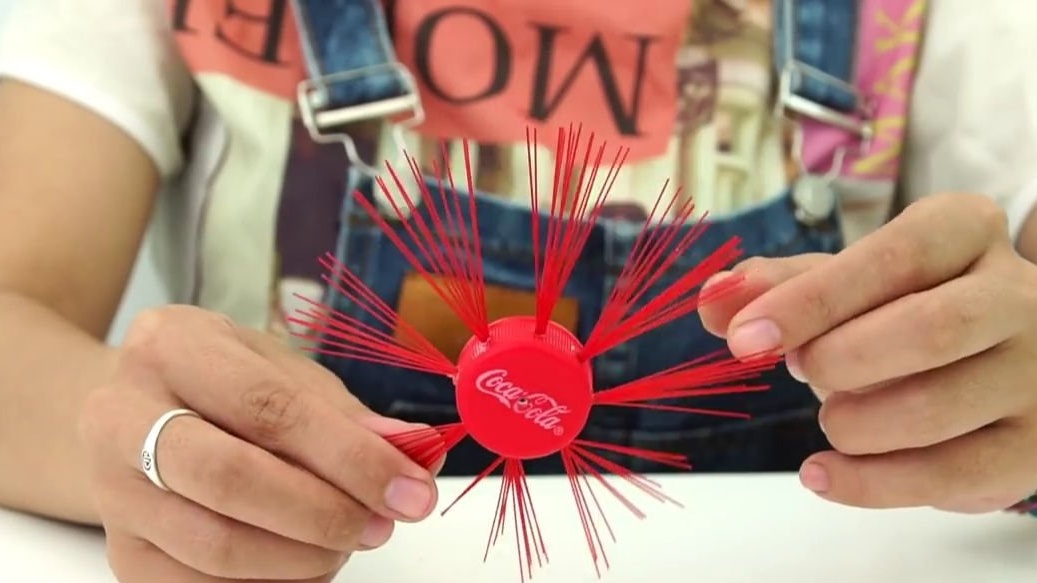
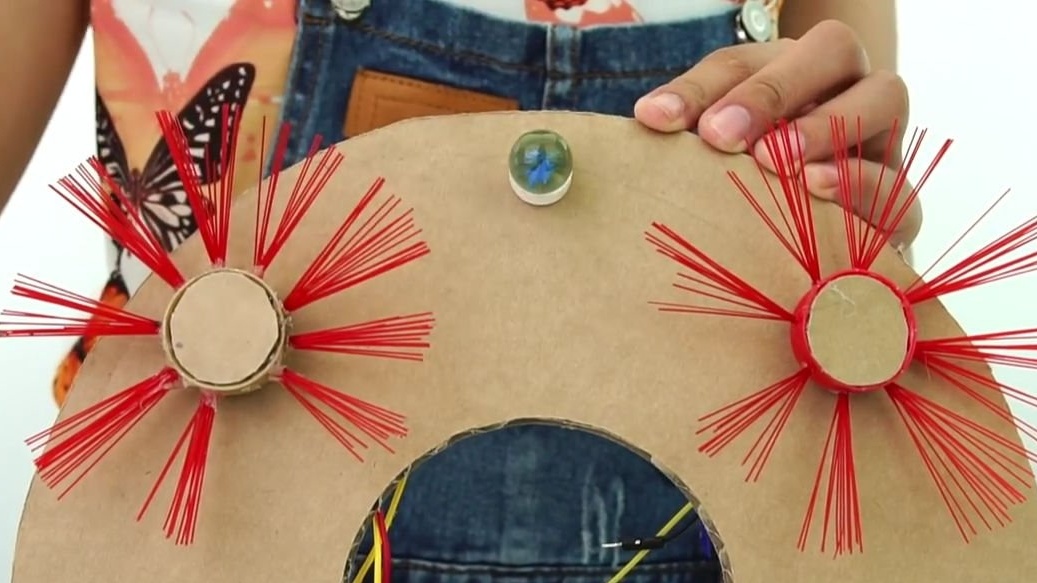
Odstraňujeme uzávěry z plastových lahví, potřebujeme pouze dva kusy. Pomocí páječky, horkého hřebíku nebo šneku vytvoříme díry: jeden ve středu víka a druhý po stranách se zářezem asi 1 cm. V otvorech po stranách vyrazíme dříve připravené štětiny z koště, měly by mít stejnou velikost. Tyto štětiny fixujeme horkým lepidlem. Celkem musí být vyrobeny dva takové polotovary.
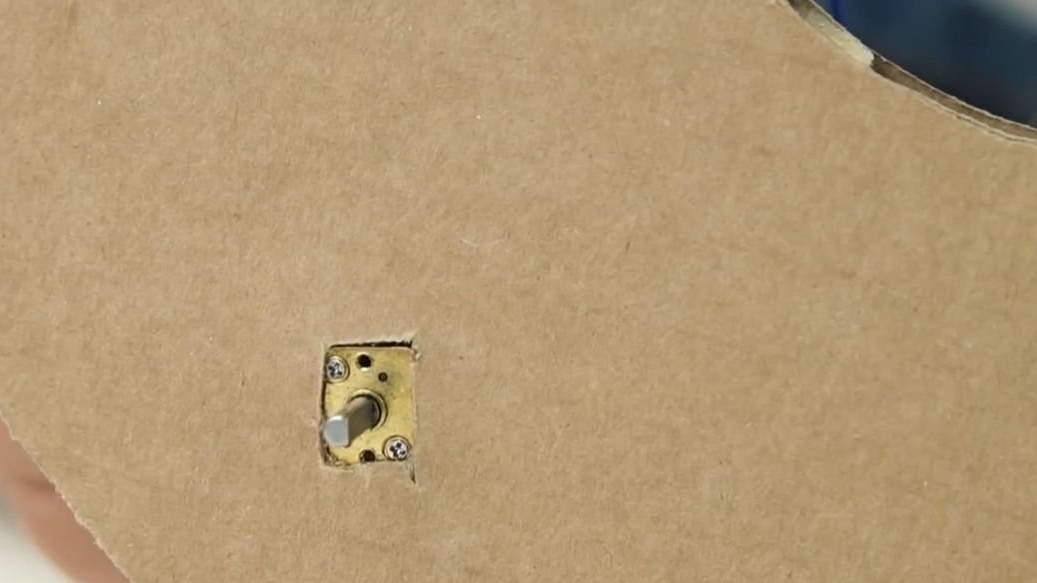
Lepíme je na osu malých motorů, které jsou umístěny na kartonovém kruhu. Lepíme znovu horkým lepidlem:


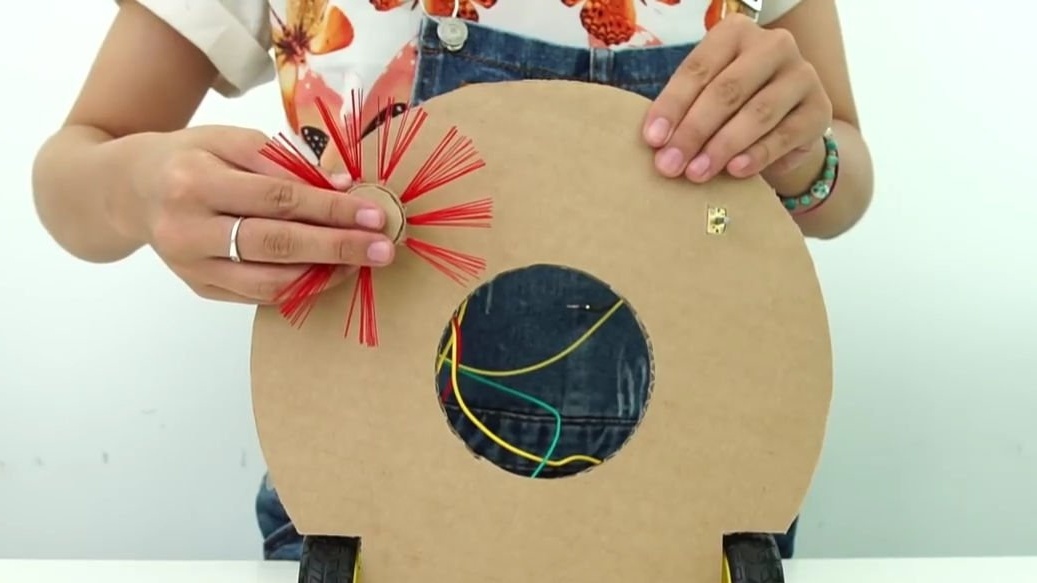

Na přední straně mezi dvěma kartáči nalepte malou kouli nebo malé kolo, které se může otáčet kolem své osy:
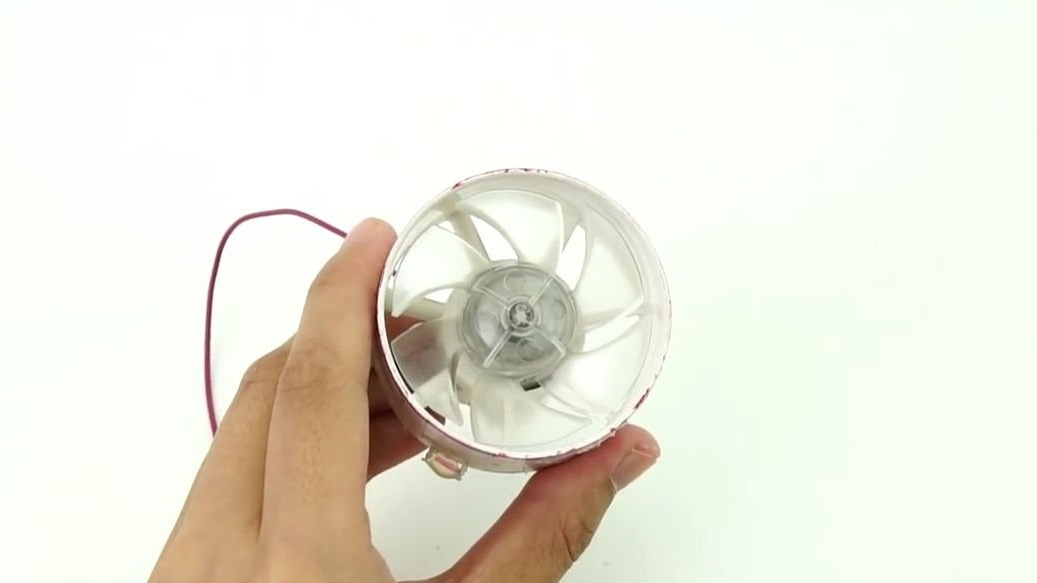
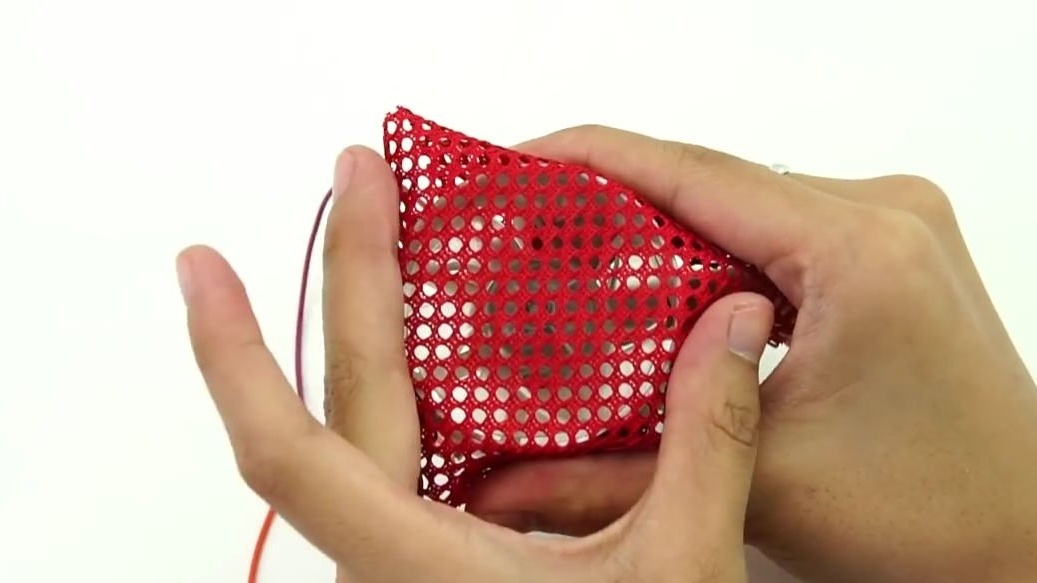
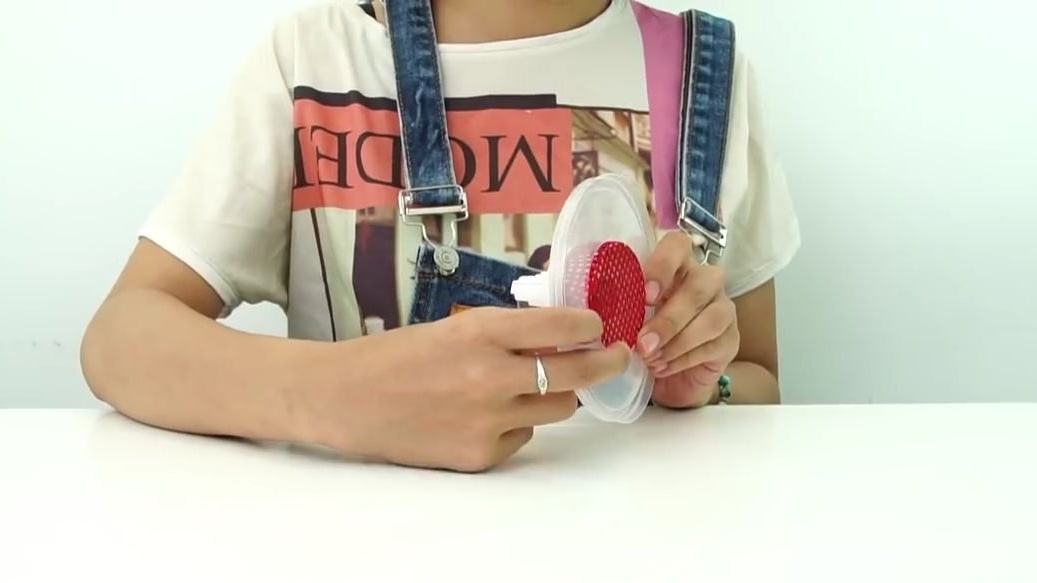
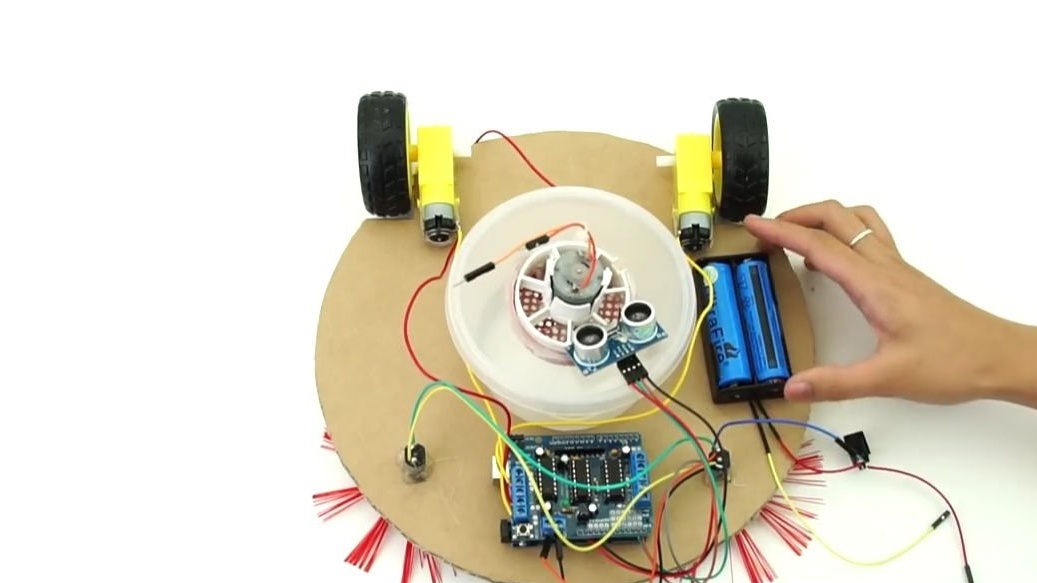
Nyní potřebujeme elektrický motor s turbínou, která může nasávat vzduch, a obecně se může objevit velmi silný chladič. Nasadili jsme a upevnili plastovou síť na přední straně turbíny, je nutné ji chránit, to znamená, aby se zabránilo vniknutí a prosévání velkých nečistot. Sejměte víko z plastové nádoby. Nádoba by měla být s výhodou kruhového tvaru. Ve víku vytvoříme rovnoměrný kruhový otvor, do kterého musíte vložit a přilepit turbínu pomocí síťky. V samotném kontejneru vytvoříme malý obdélníkový otvor s okrajem. Nasaďte víko s turbínou na kontejner a máte hotovo. Sací část robota je hotová. Chci vám připomenout, že vše musí být provedeno tak, jak je znázorněno na níže uvedené fotografii:



Vezmeme základnu robota a nainstalujeme kontejner s turbínou do středového otvoru a vše pevně přilepíme horkým lepidlem. Poté na stranu konstrukce instalujeme krabici s 18650 bateriemi a spínač připojený k jednomu z vodičů přicházejících z krabice. Připojujeme nové dráty pro napájení Arduina, uděláme konečné srážky a můžeme pokračovat.
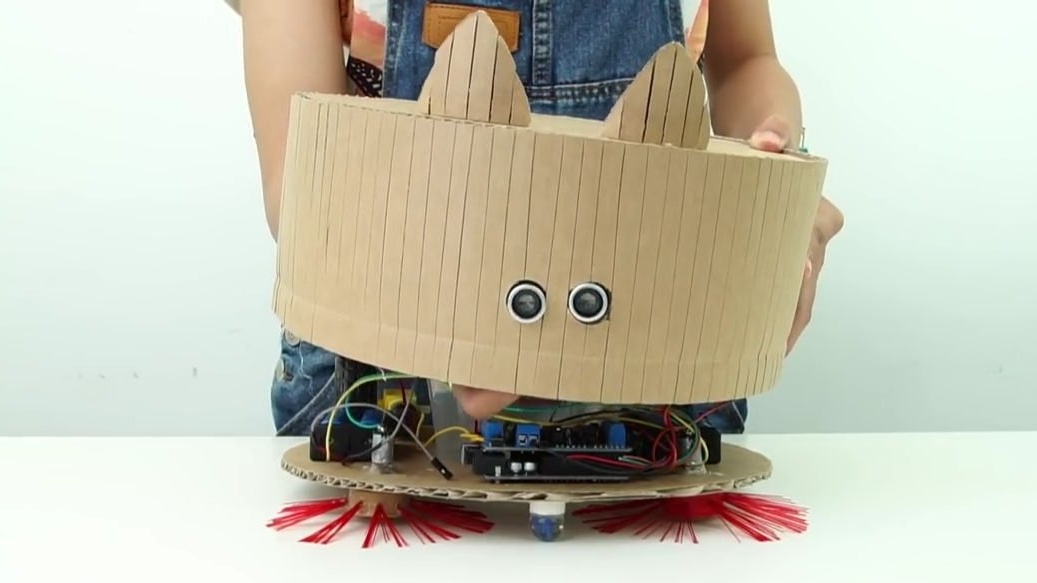
Ultrazvukový dálkoměr vkládáme do speciálních děr, které je třeba předem provést v těle robota. Tato budova, jak si možná pamatujete, byla vytvořena na začátku. Autor článku také přidal ozdobné prvky ve formě uší a místo očí vychází ultrazvukový dálkoměr, to vše vypadá velmi dobře. Položili jsme případ nad základnu konstrukce a opravili ji, ale ne moc, protože v tom případě budete muset nabít baterie k nabíjení.Samozřejmě můžete nainstalovat model pro nabíjení baterií přímo do robota, ale je nepravděpodobné, že by nahradil vysoce kvalitní nabíjení.
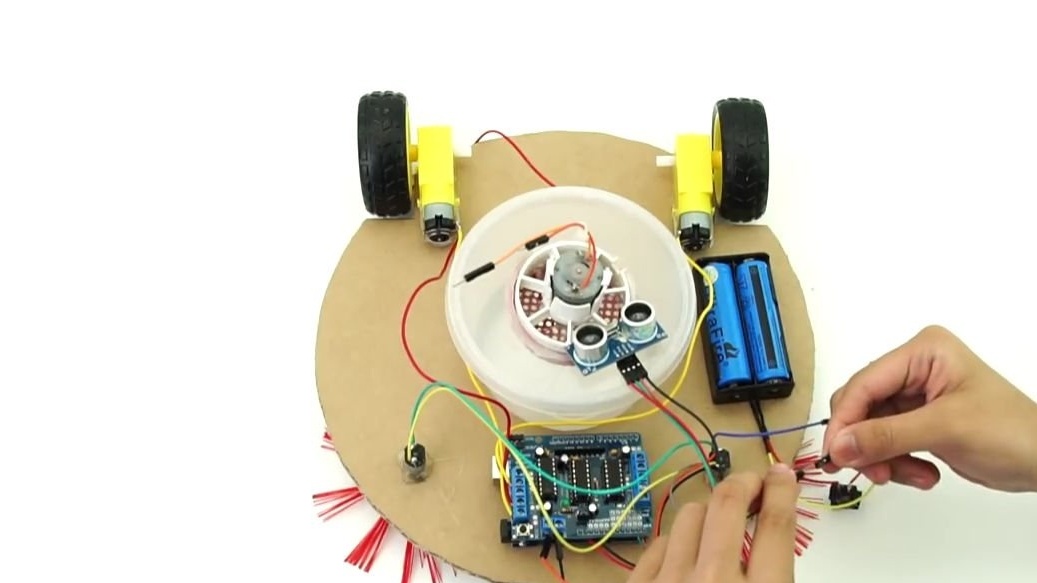

Zůstane pouze nahrát firmware do Arduina, obecně je nejlepší to udělat po připojení všech elektronických součástí ke kontrole obvodu a kódu, ale můžete to udělat později. Nejlepší je napsat si náčrt k nalití na Arduino sami, ale na internetu můžete jednoduše najít hotovou náčrtek pro roboty s jedním ultrazvukovým senzorem, který cestuje po překážce, výhoda těchto náčrtů je nyní kompletní. Ale abychom se vyhnuli různým nástrahám, je lepší psát samostatně, pro sebe.
No, to je vše! Jednoduchý a funkční robotický vysavač je připraven a zbývá pouze vyzkoušet! K tomu stačí zapnout a začít jezdit na podlaze a vysát veškerý odpad. Robot se pohybuje a otáčí se, když se překážka přiblíží, což je mnohem pohodlnější než předchozí modely.



Zde je video od autora s podrobným sestavením a domácími testy:
Můžete také pohánět tohoto robota z výkonné banky, můžete vidět moji podrobnou recenzi pro dobrou, samozřejmě, kdo se bude zajímat o toto:
Všichni mají štěstí v budoucích projektech, přátelé!