







Hlavním konceptem tohoto projektu je, že s pomocí různých mozkových vln bude uživatel schopen ovládat robota, kurzor na svém PC nebo zapnout / vypnout světla ve svém domě, zatímco mikrokontrolér (Particle Photon) vytvoří online analýzu mozkových vln uživatele. Takže ano, s tímto zařízením můžete opravdu využít sílu myšlení
 ... Toto zařízení není určeno pouze pro líné nebo fanoušky, ale bylo vytvořeno proto, aby lidem poskytlo příležitost. kteří bojují každý den se svým postižením. Robotvytvořené autorem funguje stejně jako systém invalidního vozíku domů automatizace pomůže uživateli ovládat světlo nebo televizi, i když se nemůže pohybovat. Režim PC kontroleru může být užitečný i pro ty, kteří jsou zcela zdraví.
... Toto zařízení není určeno pouze pro líné nebo fanoušky, ale bylo vytvořeno proto, aby lidem poskytlo příležitost. kteří bojují každý den se svým postižením. Robotvytvořené autorem funguje stejně jako systém invalidního vozíku domů automatizace pomůže uživateli ovládat světlo nebo televizi, i když se nemůže pohybovat. Režim PC kontroleru může být užitečný i pro ty, kteří jsou zcela zdraví. Jak to funguje?

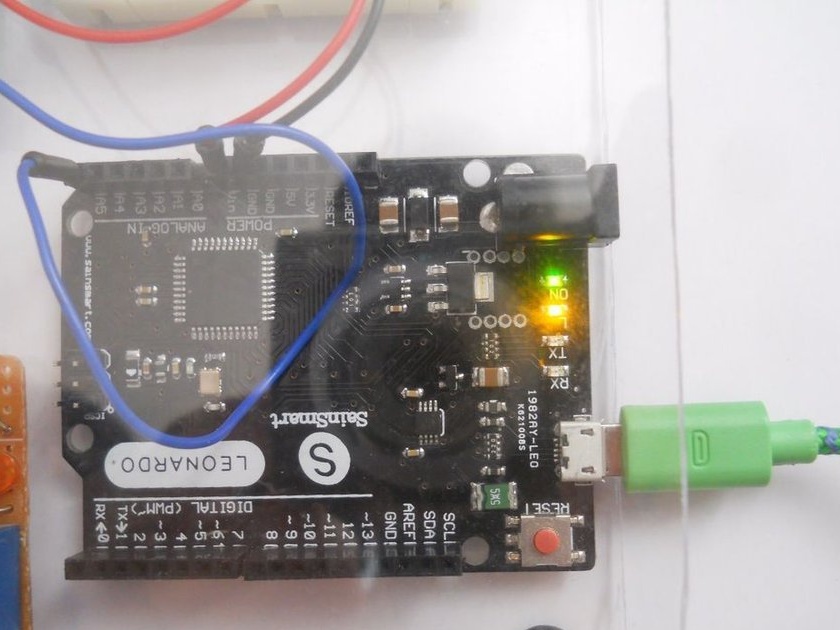
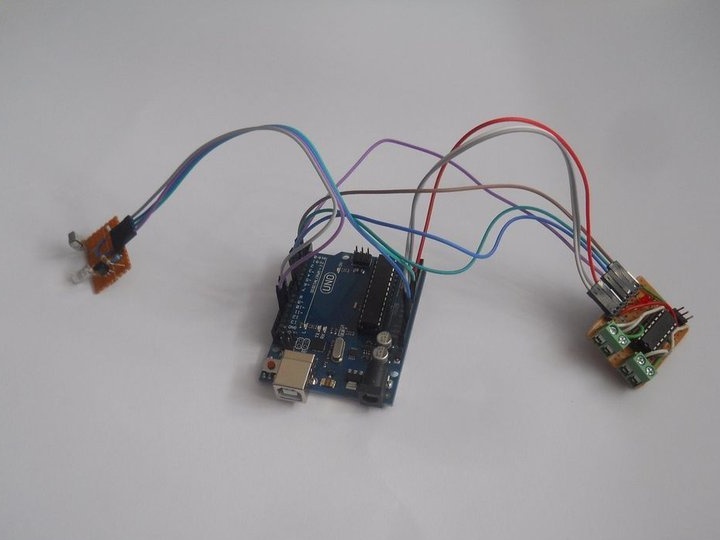
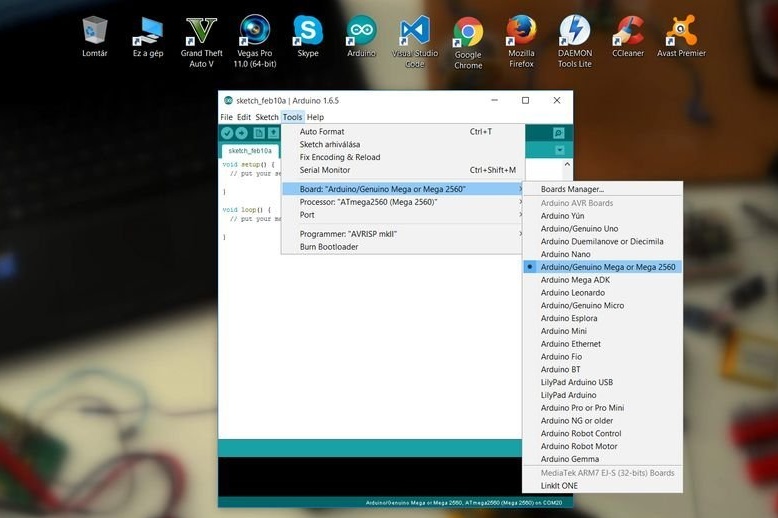
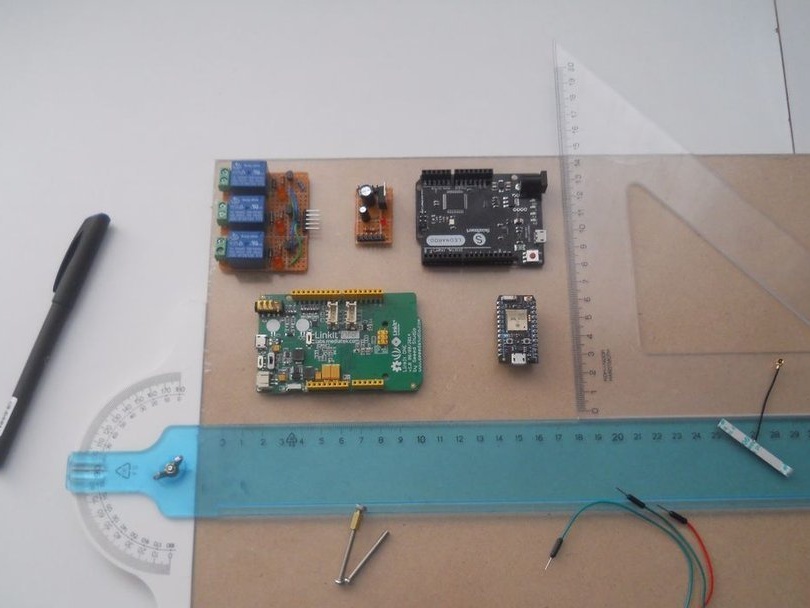
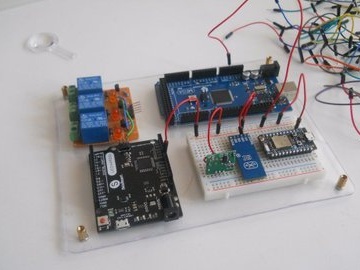
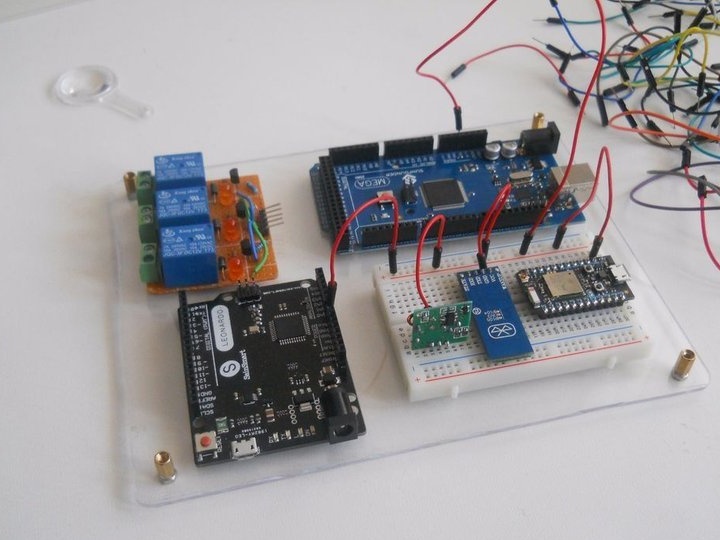
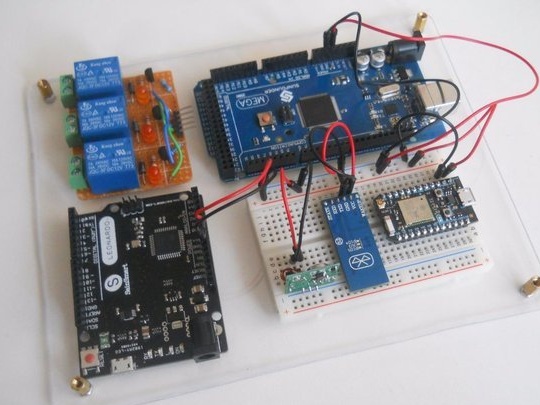
K oživení tohoto projektu byly použity čtyři mikrokontroléry: Arduino Mega, Arduino Leonardo, UNO a částicový foton. Mega je mozek projektu, který přijímá signály z headsetu, analyzuje a odesílá příkazy dalším zařízením. Předává všechna data do Particle Photon, který vytváří webový server. Leonardo ovládá myš na PC a Uno se používá k přijímání IR (infračervené signály) ak ovládání robota. Zařízení je schopné ovládat tři různá zařízení (nebo více, pokud chcete programovat něco jiného). Dále se tato tři různá zařízení budou nazývat kanály. Přístroj přepíná mezi těmito kanály, pokud zavřete oči:
Zavřete oči na 1 - 2 sekundy: přepněte na domácí automatizaci
Zavřete oči na 2 až 4 sekundy: přepněte do režimu ovladače robota
Zavřete oči na 1-6 sekund: přepne se do režimu ovládání myši
Aby fungovala domácí automatizace, ke které můžete připojit cokoli: byla použita televize, žárovky, zásuvky, cokoli, relé
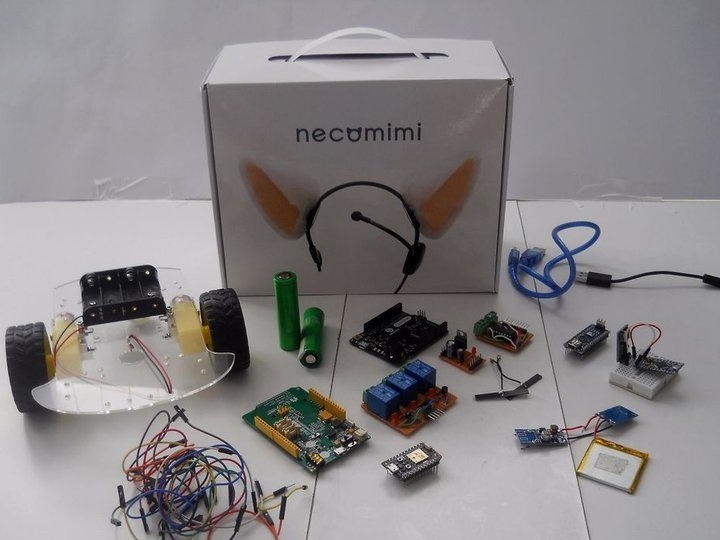
Pro vnímání mozkových vln - Necomimi, které mohou pohnout vaše uši v závislosti na mozkových vlnách (pozornost, meditace). Uvnitř malého čipu, který čte mozkové vlny, filtruje hluk a dává velmi dobrý signál. Funguje to s rozhraním UART (Serial), takže s nějakým hackováním můžeme použít Arduino ke čtení mozkových vln.Úlohou této náhlavní soupravy je bezdrátový přenos mozkových vln na centrální server.
Pokud již znáte předchozí projektpak můžete přeskočit fázi demontáže a přestavby Necomimi.
Jděte dolů a uvidíte, jak se z něj rozebrat a vyrobit z něj bezdrátovou náhlavní soupravu Bluetooth.
Řídicí systém domácí automatizace
Pokud přepnete do režimu domácí automatizace, zvýšíte úroveň pozornosti nad 70 a zapnete první relé, zvýšením meditační úrovně nad 70 zapnete druhé relé a zvýšením obou hodnot nad 70 zapnete své třetí relé. Je to trochu obtížné, ale ne nemožné po nějakém tréninku mysli. Pokud je relé již zapnuto, vypněte jej pomocí stejného příkazu (pokud je zapnutý, vypněte jej pomocí 70). Když je systém připraven, lze k reléovému modulu připojit jakékoli vysokonapěťové zařízení (světlo, TV, počítač, ventilátor, cokoli).
Ovládání myší
Kurzor je ovládán emocemi. Pokud je úroveň pozornosti menší než 25, pohybuje se doleva, pokud mezi 25 a 50 se pohybuje doprava, pokud mezi 50 a 75 stoupá a mezi 75 a 100 klesá. Můžete kliknout na tlačítko myši zvýšením úrovně meditace. Samozřejmě to musíte trénovat.
Ovládání robota
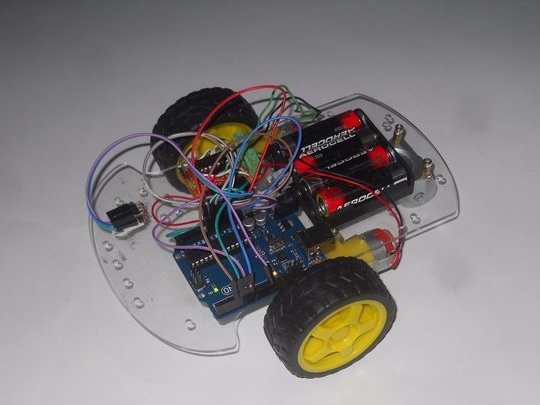
Robot má pouze tři různé týmy: zastavte se, otočte doleva a posuňte se dopředu. Proč jen dvě možnosti pohybu? Protože tyto dva směry stačí k přesunutí robota kamkoli. Použijte svou úroveň meditace k rotaci s robotem, a když jste dosáhli směru, kterým se chcete pohybovat, zastavte robota a poté se pohybujte dopředu s úrovní pozornosti. To je nejlepší způsob, jak ovládat robota, a dokonce i začátečníci, kteří nedokážou dobře ovládat své hodnoty pozornosti / meditace, si s tímto robotem mohou hrát.
Náhlavní souprava přenáší signály BT (Bluetooth) do Arduino Mega, která analyzuje příchozí bajty a v závislosti na uživatelských myšlenkách řídí různé funkce. Nejprve chtěl autor použít Particle Photon jako datový vysílač, ale tento malý modul dostal roli při vytváření webového serveru. Jednalo se o největší změnu v celém projektu. Použil také domácí moduly Arduino, ale ty si můžete koupit online.
Všechny díly jsou z GearBest.com. Jedná se o internetový obchod, stejně jako eBay, ale náhradní díly jsou dodávány mnohem rychleji (možná vše je na aliexpressu). Pokud tedy chcete vytvořit svůj vlastní herní ovladač, robotický ovladač nebo Force Detecto r, začněte nákupem dílů.






Potřebné nástroje:
páječka
pájka
lepicí pistole
samolepicí páska / oboustranná páska
odizolovač drátu
řezačky drátu
Vybavení
/ Arduino Nano
Software:
Hacking Necomimi







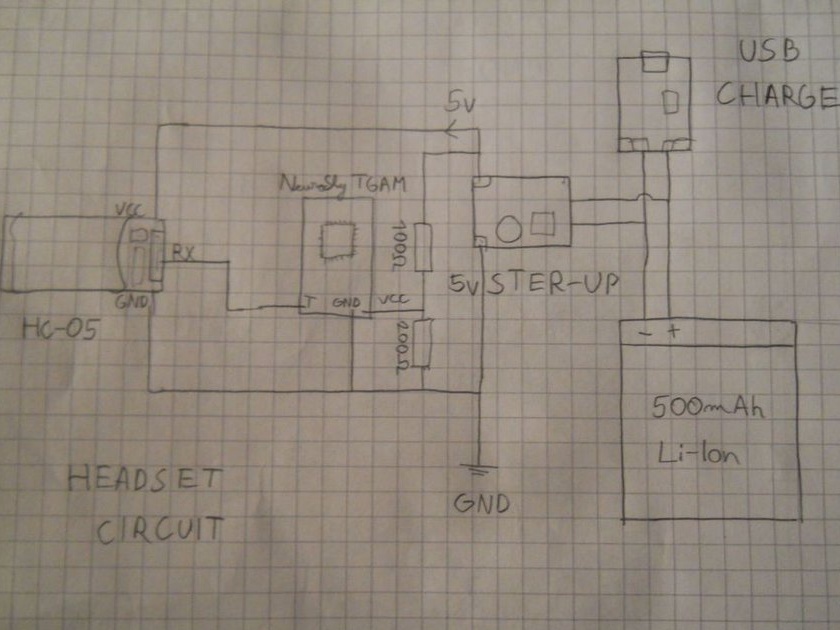
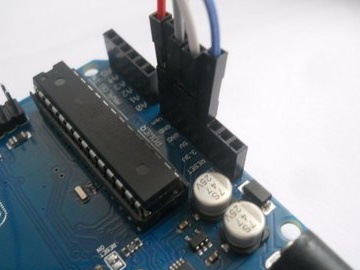
Chceme upravit tuto EEG hračku pro přenos dat přes Bluetooth, takže nejprve rozložíme případ. Šrouby jsou pod nálepkou. Odstraňte nálepku a zadní část zařízení a uvnitř najdete malé desky. Ten pod hlavní deskou je čip Neurosky TGAM. K ní se připájí 4 dráty z hlavní desky mikrokontroléru, proto si páječku a pájecí obvod opatrně vyjměte. Nyní pájejte tři dráty na GND pin, na VCC pin a na T pin. T-pin je výstup vysílače s rychlostí 57600 baudů, který odesílá datové pakety do našeho mikrokontroléru. Jakmile pájíte výše uvedené tři dráty, můžete vestavět svůj vlastní dobíjecí zdroj energie. Autor používá lithium-iontovou baterii 500 mAh, USB nabíjecí obvod, 5 V boost obvod a dva rezistory (100 Ohmů a 200 Ohmů) k zajištění samostatného 3,4 V napájení čipu a modulu Bluetooth. Na fotografii je schéma zapojení.
Pokud je obvod připraven, nakonfigurujte modul Bluetooth.
Postupujte podle pokynů a obrázků níže a vytvořte si vlastní bezdrátový headset EEG.
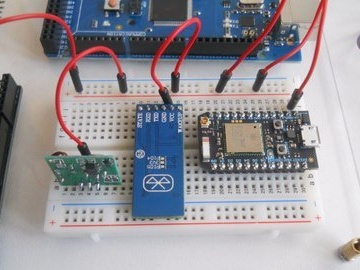
Nejdůležitější součástí je připojení kolíku „T“ k „RX“ na modulu Bluetooth.



HC-06: Nejprve nahrajte náčrt s názvem „HC_06_Bluetooth“ do Arduino UNO a poté připojte modul Bluetooth, jak je znázorněno na obrázku.
// HC-06-Bluetooth
neplatné nastavení () {
// Spuštění sériového hardwaru.
Serial.egegin (9600); // výchozí přenosová rychlost HC-06
zpoždění (1000);
Serial.print ("AT");
zpoždění (1000);
Serial.print („AT + VERSION“);
zpoždění (1000);
Serial.print („AT + PIN“); // pro odstranění hesla
zpoždění (1000);
Serial.print ("AT + BAUD7"); // Nastavte přenosovou rychlost na 576000 - např. Necomimi dafault
zpoždění (1000);
Serial.begin (57600); //
zpoždění (1000);
}
void loop () {
}Otevřete sériový monitor v Arduino IDE a počkejte, až Arduino nakonfiguruje modul BT. Váš modul Bluetooth je nyní nastaven na 57600 baudů. Můžete vyzkoušet mnoho aplikací BCI (Brain Computer Interface), protože tato hacknutá hračka Necomimi bude kompatibilní s libovolnými aplikacemi Neurosky.
Pomocí těchto aplikací se můžete naučit, jak ovládat své mozkové vlny.
HC-05: Poté použijte „HC_05_Bluetooth“ a načtěte Arduino stejným způsobem jako dříve.
// HC-06-Bluetooth
neplatné nastavení () {
// Spuštění sériového hardwaru.
Serial.egegin (9600); // výchozí přenosová rychlost HC-05
zpoždění (1000);
Serial.print ("AT");
zpoždění (1000);
Serial.print („AT + VERSION“);
zpoždění (1000);
Serial.println ("AT + ROLE = 1"); // nastavte HC-05 do hlavního režimu
zpoždění (1000);
Serial.println ("AT + LINK =" Sem zadejte svou adresu "); // nyní by se měl modul automaticky připojit
zpoždění (1000);
Serial.print ("AT + UART = 57600,1,0"); // Nastavte přenosovou rychlost na 576000
Serial.begin (57600); //
zpoždění (1000);
}
void loop () {}
Připojte pin „EN“ HC-05 k Arduino 3v3. Musíte zadat adresu vašeho modulu HC-06 v kódu. Zkontrolujte adresu BT modulu na smartphonu Android. Nahraďte „:“ (dvojité tečky) čárkami v kódu.
A musíte změnit adresu v kódu: 20: 15: 09: 15: 17: 82 = 2015.09.151782, takže modul HC-05 dokáže adresu rozpoznat.
Dálkové ovládání
K vytvoření tohoto levného robota byl použit infračervený senzor 38 kHz, který se používá v televizních dálkových ovladačích.
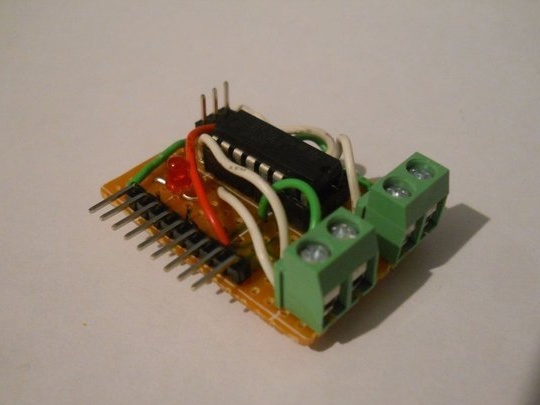
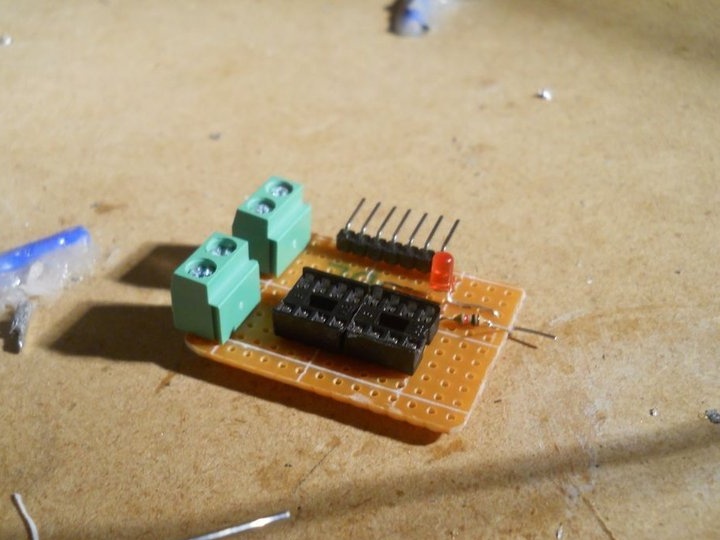
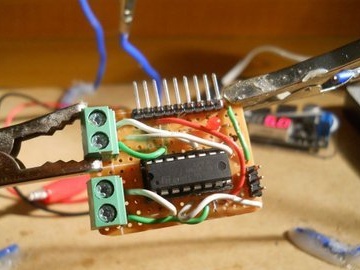
Řidič motoru
Schéma pohonu motoru - Budete potřebovat následující podrobnosti:
2 šroubové terminály
L293D IC3
Kolík záhlaví (90 stupňů)
1k rezistor
Červená LED
Dráty
Obvodová deska
Pomocí několika měděných vodičů a podle schématu připojte kolíky mikroobvodů ke konektorovým kolíkům. Nezáleží na tom, která noha mikroobvodu, ke kterému kolíku konektoru, jen si pamatujte, kde jste je připojili. LED je zapojena do série s odporem a paralelně s 5 V VCC.
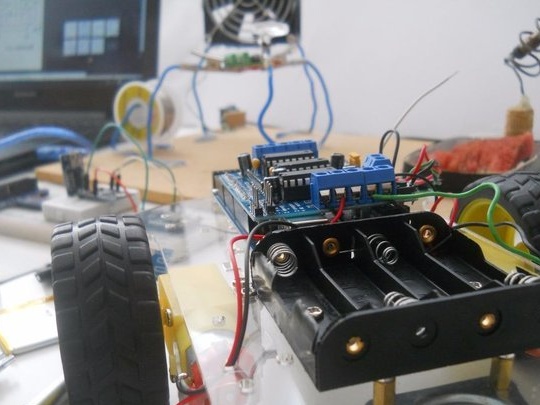
montáž podvozku
Jako ovladač elektromotoru se používá čip L293D, který může ovládat dva motory. Podívejte se na diagram sestavení diagramu.
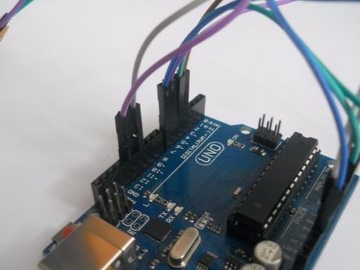
Připojte díly k Arduino
Arduino Pin == & gt; řidič motoru
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
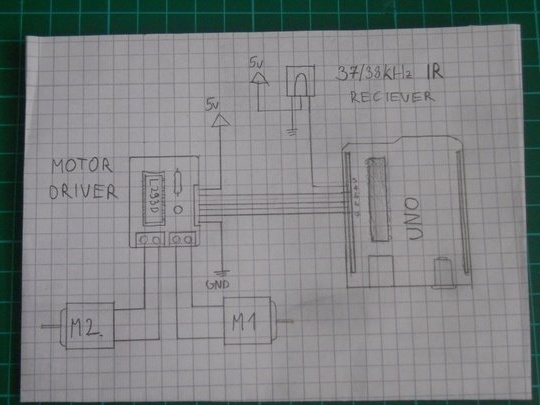
Podívejte se na schéma zapojení modulu L293D a připojte jeho kontakty k Arduino UNO, jak je popsáno výše. Pin 5v Arduino musí být připojen k pinům 1, 9, 16 pro aktivaci funkce řízení motoru motoru. Nakonec pomocí šroubových svorek zapněte motory.
Knihovna používá IRremote, kód, který čte infračervené signály 38 kHz, dekóduje je a poté pohybuje robotem. (Stáhněte si knihovnu v části „software“).
V kódu jsou komentáře, ale spodním řádku je to, že dekóduje infračervené signály přicházející z hlavního serveru, potom v závislosti na tom, co uživatel chce, zapne motory, po kterých se robot pohybuje dopředu nebo doleva. Stáhněte si kód: "Robot_Code". Stáhněte si to do svého Arduina a váš robot bude připraven.
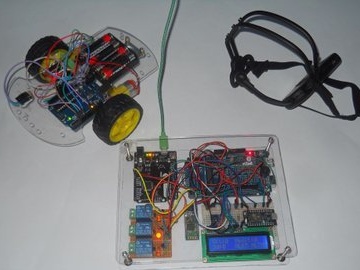
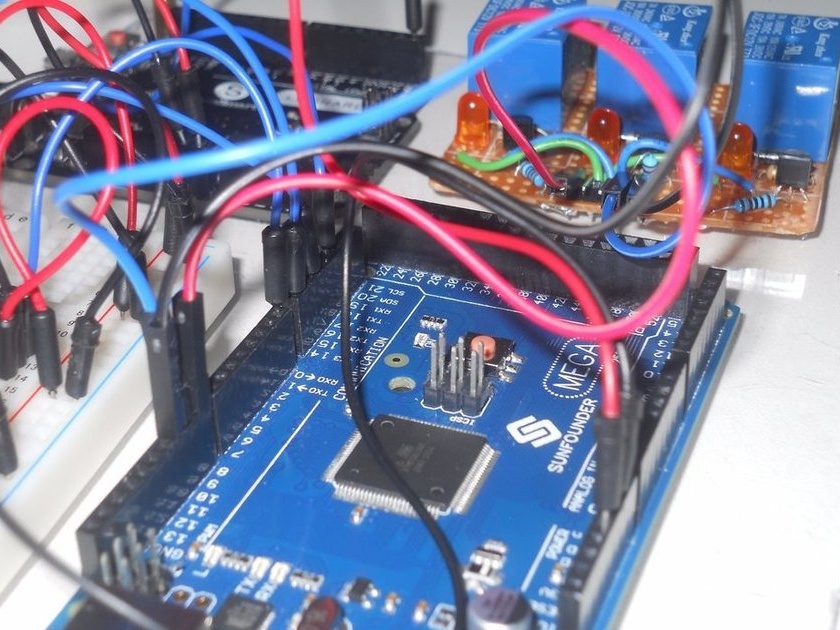
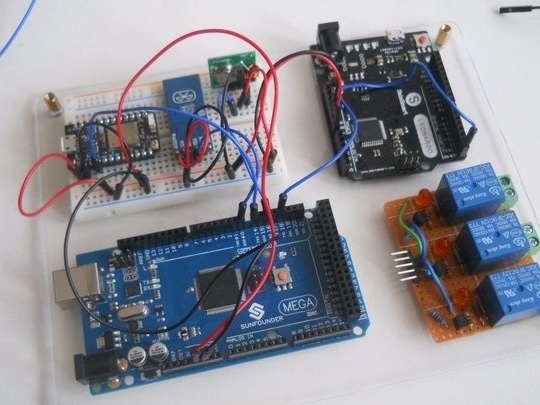
Hlavní server (Arduino Mega, Leonardo, Photon)




Server čte příchozí datové pakety z bezdrátové náhlavní soupravy. K zajištění komunikace mezi náhlavní soupravou a serverem použijeme nakonfigurovaný modul BT. Arduino Mega je mozkem celého obvodu, vše je spojeno s tímto mikrokontrolérem: Bluetooth, infračervený LED vysílač, webový server a řadič myši. Kód je trochu komplikovaný, ale zpravidla má komentáře, kterým musí rozumět.
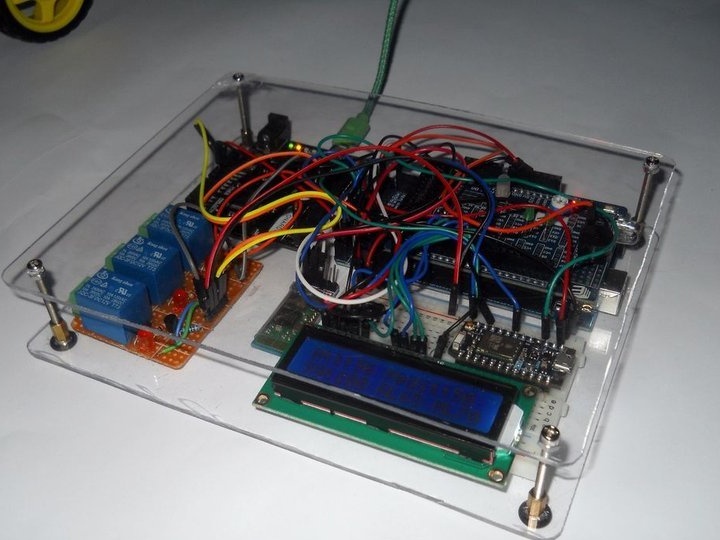
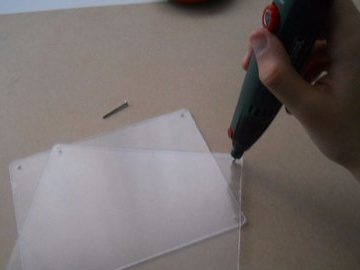
Bydlení
Všechno je jednoduché. Dvě desky z plexiskla o rozměrech 18x15 cm, okraje vyhlaďte brusným papírem. Několik šroubů k jejich vzájemnému spojení.
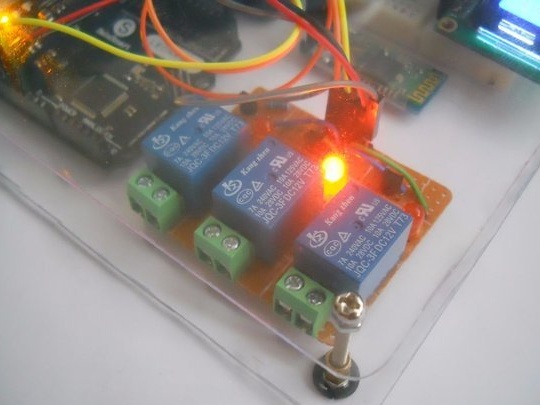
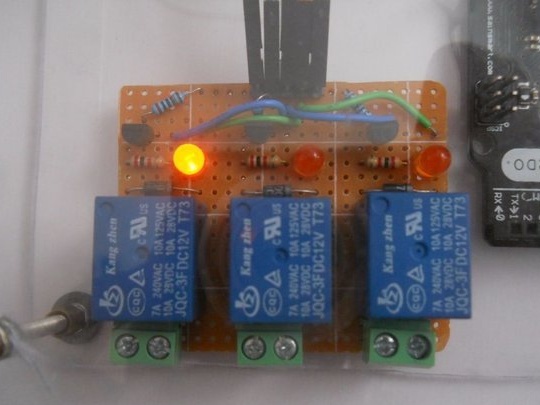
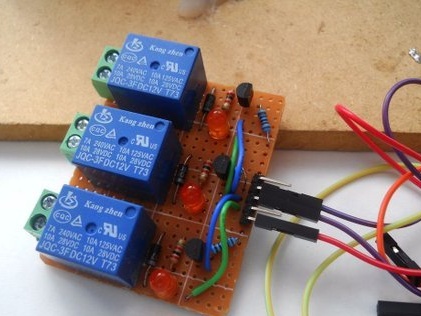
Reléová deska
Budete potřebovat následující údaje:
Tranzistor 2n2222 (3 ks)
germaniové diody (3 ks)
Rezistory 330 ohmů (3 ks)
1 kOhm rezistory (3 ks)
Relé 5 V (3 ks)
kolíkové konektory
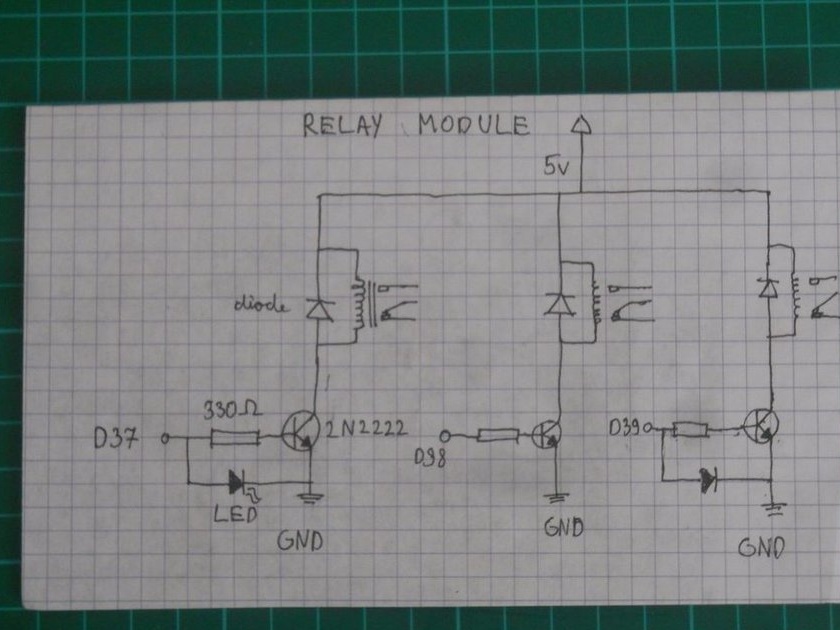
Obvodová deska
Obrázek má hodnotu více než tisíc slov, takže se podívejte na schéma, jak připojit součásti na desce plošných spojů.
Pokud je výstup „Signal“ z Arduina, relé se zapne. Tranzistor zesiluje signál tak, aby poskytoval dostatečný výkon pro relé. Použijeme kontakty 37-38-39 pro ovládání VYSOKÉ NÍZKÉ úrovně každého relé.
K instalaci dílů do plexiskla použil autor oboustrannou pásku. Docela drží podrobnosti.
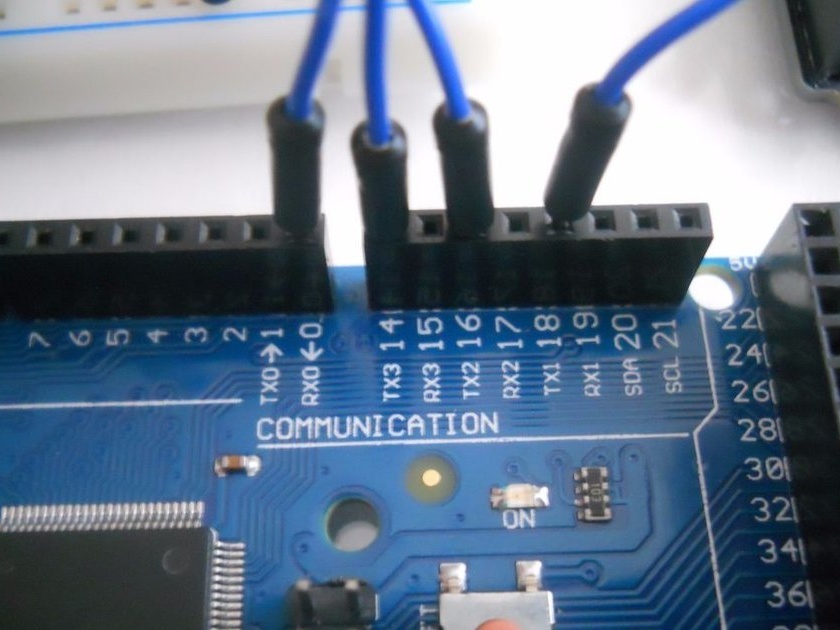
Jedná se o softwarový server, takže vytvoření obvodu není tak obtížné. Stačí zapnout mikrokontroléry a navázat spojení mezi nimi. IR LED je připojena na pin D3 a relé je připojeno na 37-38-39. D16 Arduino Mega jde do RX Photon a D18 do RX Leonardo.
Připojení robota
[2.02 Kb] (počet stažení: 14)
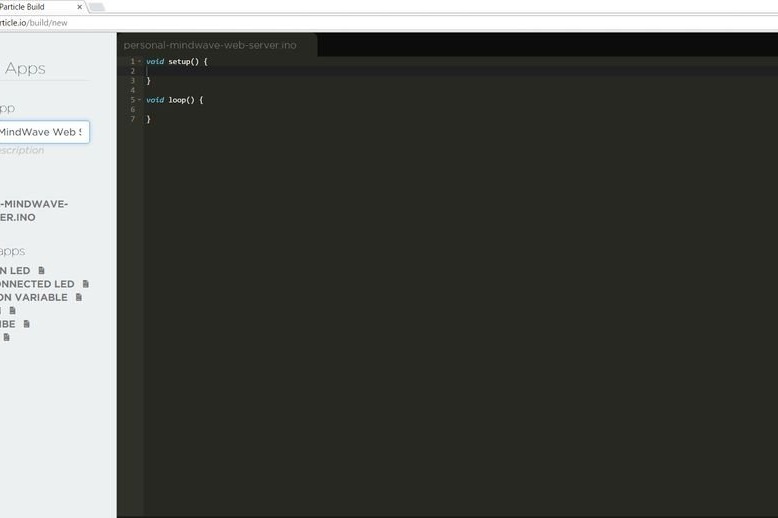
Nyní je však kód připraven a funkční, takže si stačí stáhnout mikrokontroléry. Stáhněte si soubor .ino nebo zkopírujte / vložte kód do svého IDE a použijte jej. Kód pro Particle Photon musí být stažen přes prohlížeč IDE. Chcete-li to provést, zaregistrujte se na adrese. Připojte svůj notebook k mikrokontroléru. Všechno se děje téměř automaticky, stačí přidat ID zařízení.
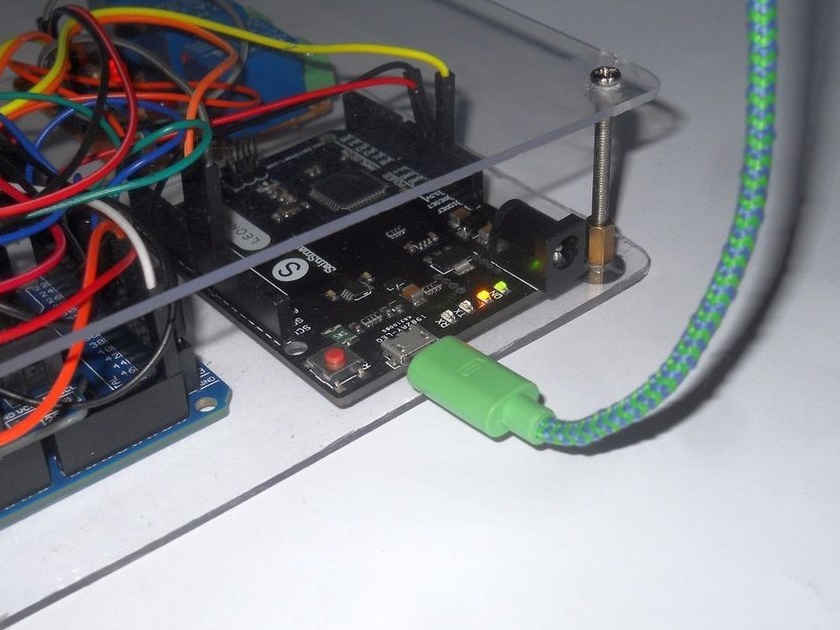
Před stažením kódů se ujistěte, že na piny RX / TX není nic připojeno. Odpojte tedy Bluetooth modul od Mega a odpojte Mega od Leonarda a Photona.
[489 b] (počet stažení: 15)

Webový serverPro přidání funkce IoT (Internet of Things) do jeho projektu vytvořil autor online záznamník dat pomocí Particle Photon. V závislosti na tom, co děláte se zařízením, Photon vytvoří osobní server a zapíše data do cloudu.To se může na první pohled zdát zastrašující, ale představte si, že můžete určit, zda jste zdůraznil (úrovně pozornosti rychle rostou a klesají) nebo stojí za to jít spát
(úroveň meditace je vždy nad 80)
. Tento webový server vám může pomoci žít zdravěji.
Kódování prohlížeče
Particle má také online panel, kde můžete publikovat všechna data pomocí „Particle.publish ();“ syntaxe. Vývojáři panelů nástrojů ušetřili uživatelům spoustu času.
